![]() We are always on the lookout for affordable new sensors which our customers could find useful. Among the difficult tasks, there is the remote detection of moving objects. We were therefore happy to discover a small radar sensor named K-LD2 manufactured by RFbeam.
We are always on the lookout for affordable new sensors which our customers could find useful. Among the difficult tasks, there is the remote detection of moving objects. We were therefore happy to discover a small radar sensor named K-LD2 manufactured by RFbeam.
This small module has the shape of a 25mm by 25mm square, with a thickness of about 7mm.
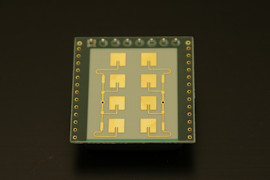

The RFbeam K-LD2 radar sensor
The larger face directly embeds high-frequency antennas for the emission and reception of the radar signal and, at the back of the PCB, there is all the electronics that is needed to perform the measures and the computations, so as to directly provide the detection information of the moving object, among which the moving speed.
When reading the documentation, you can know from the start that it's a serious product: the documentation is clear and well illustrated. The working principle is explained in details and the control parameters are well defined. You can see that the product designers put themselves in the shoes of those who would use it. No comparison with the junk that you may get from Alibaba...
There is a small, not very expensive, evaluation kit with software which enables you to play with the parameters to see their impact on detection levels. If you want to use this sensor, it may save you some time and effort and the demonstration software is very well made.

Interface of the evaluation software provided in the evaluation kit
Connection
You can power this sensor in 3.3V or in 5V. It communicates with a 38'400bps TTL series interface. The Yocto-Serial is therefore the ideal module to communicate with it and to power it. Here is the connection diagram:

Connecting the RFbeam K-LD2 radar to the Yocto-Serial
Protocol
You can configure and query the sensor with a very simple protocol, based on text commands. We are going to directly integrate radar querying into a "job" inside the Yocto-Serial, so that the query is performed autonomously by the Yoctopuce module in order to use the radar directly, as if it were a native Yoctopuce sensor.
The most convenient command for our application is "C01": it returns four numbers followed by semicolons, corresponding to
- the speed of the main object which is going forward
- the speed of the main object which is going backward
- the echo amplitude returned by the object going forward
- the echo amplitude returned by the object going backward
If no object going forward or backward reaches the minimal amplitude threshold configured in the radar, the corresponding number stays at zero.
Here is the protocol that you can use to define a job for the Yocto-Serial:

Job to query the K-LD2 radar sensor
To obtain the effective speed in m/s or in km/h based on the retrieved number, you must multiply it by a factor which depends on the radar orientation angle in relation to the direction of travel. It's logical and everything is very clearly explained in the documentation.
Tests
When this job is running, the genericSensor1..4 functions of the Yocto-Serial immediately advertise objects detected by the radar. We can therefore mount our radar sensor on a YoctoHub-Ethernet, position it at the end of a cable at the side of the road, powered by Power-over-Ethernet, and use Yocto-Visualization to display the measures in real time and see what happens...

Trace of the measures returned by the K-LD2 sensor
It's easy to recognize a pedestrian going in one direction and a car coming later in the other direction.
Conclusion
For a small product costing EUR 40, this radar impressed us by its quality and ease of use. You could find it very useful for example to reliably and remotely detect a user coming forward, outside as well as inside.
Given the quality of this product, we couldn't resist and we ordered its big brother, the K-LD7, which can measure the exact position of the moving object, on top of its speed. We'll probably tell you again sometime if it works as well...

