Yocto-Color : Manuel d'utilisation
1.1 Prérequis 1.2 Accessoires optionnels 2. Présentation
2.1 Les éléments communs 2.2 Les éléments spécifiques 3. Premiers pas
3.1 Localisation 3.2 Test du module 3.3 Configuration 4. Montage et connectique
4.1 Fixation 4.2 Déporter les Leds 4.3 Contraintes d'alimentation par USB 5. Programmation, concepts généraux
5.1 Paradigme de programmation 5.2 Le module Yocto-Color 5.3 Interface de contrôle du module 5.4 Interface de la fonction ColorLed 5.5 Les espaces de couleurs: RGB et HSL 5.6 Quelle interface: Native, DLL ou Service? 5.7 Programmation, par où commencer? 6. Utilisation du Yocto-Color en ligne de commande
6.1 Installation 6.2 Utilisation: description générale 6.3 Contrôle de la fonction ColorLed 6.4 Contrôle de la partie module 6.5 Limitations 7. Utilisation du Yocto-Color en JavaScript / EcmaScript
7.1 Fonctions bloquantes et fonctions asynchrones en JavaScript 7.2 Utiliser la librairie Yoctopuce pour JavaScript / EcmaScript 2017 7.3 Contrôle de la fonction ColorLed 7.4 Contrôle de la partie module 7.5 Gestion des erreurs 8. Utilisation du Yocto-Color en PHP
8.1 Préparation 8.2 Contrôle de la fonction ColorLed 8.3 Contrôle de la partie module 8.4 API par callback HTTP et filtres NAT 8.5 Gestion des erreurs 9. Utilisation du Yocto-Color en C++
9.1 Contrôle de la fonction ColorLed 9.2 Contrôle de la partie module 9.3 Gestion des erreurs 9.4 Intégration de la librairie Yoctopuce en C++ 10. Utilisation du Yocto-Color en Objective-C
10.1 Contrôle de la fonction ColorLed 10.2 Contrôle de la partie module 10.3 Gestion des erreurs 11. Utilisation du Yocto-Color en VisualBasic .NET
11.1 Installation 11.2 Utilisation l'API yoctopuce dans un projet Visual Basic 11.3 Contrôle de la fonction ColorLed 11.4 Contrôle de la partie module 11.5 Gestion des erreurs 12. Utilisation du Yocto-Color en C#
12.1 Installation 12.2 Utilisation l'API yoctopuce dans un projet Visual C# 12.3 Contrôle de la fonction ColorLed 12.4 Contrôle de la partie module 12.5 Gestion des erreurs 13. Utilisation du Yocto-Color en Delphi
13.1 Préparation 13.2 Contrôle de la fonction ColorLed 13.3 Contrôle de la partie module 13.4 Gestion des erreurs 14. Utilisation du Yocto-Color en Python
14.1 Fichiers sources 14.2 Librairie dynamique 14.3 Contrôle de la fonction ColorLed 14.4 Contrôle de la partie module 14.5 Gestion des erreurs 15. Utilisation du Yocto-Color en Java
15.1 Préparation 15.2 Contrôle de la fonction ColorLed 15.3 Contrôle de la partie module 15.4 Gestion des erreurs 16. Utilisation du Yocto-Color avec Android
16.1 Accès Natif et Virtual Hub. 16.2 Préparation 16.3 Compatibilité 16.4 Activer le port USB sous Android 16.5 Contrôle de la fonction ColorLed 16.6 Contrôle de la partie module 16.7 Gestion des erreurs 17. Programmation avancée
17.1 Programmation par événements 18. Mise à jour du firmware
18.1 Le VirtualHub ou le YoctoHub 18.2 La librairie ligne de commandes 18.3 L'application Android Yocto-Firmware 18.4 La librairie de programmation 18.5 Le mode "mise à jour" 19. Utilisation avec des langages non supportés
19.1 Ligne de commande 19.2 Virtual Hub et HTTP GET 19.3 Utilisation des librairies dynamiques 19.4 Port de la librairie haut niveau 20. Référence de l'API de haut niveau
20.1 Fonctions générales 20.2 Interface de contrôle du module 20.3 Interface de la fonction ColorLed 21. Problèmes courants
21.1 Linux et USB 21.2 Plateformes ARM: HF et EL 21.3 Module alimenté mais invisible pour l'OS 21.4 Another process named xxx is already using yAPI 21.5 Déconnexions, comportement erratique 21.6 Par où commencer ? 22. Caractéristiques
23. Index
1. Introduction
Le module Yocto-Color est un module de 60x20mm qui permet de commander indépendamment deux leds RGB. Ces leds de moyenne puissance peuvent être pilotées soit en utilisant le système de couleur RGB, soit HSL. Le module est aussi capable d'opérer une transition entre deux couleurs de manière autonome. Le module est composé de trois parties sécables: le module de commande proprement dit et chacune des deux leds. Ce qui permet de déporter les leds pour les placer dans des endroits relativement exigus. Ce module conviendra pour faire de la signalisation musclée, ou du petit éclairage d'ambiance.
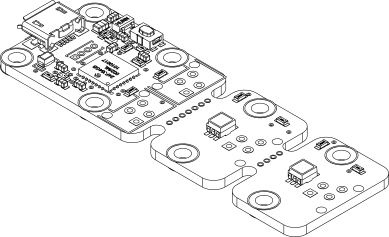
Le module Yocto-Color
Yoctopuce vous remercie d'avoir fait l'acquisition de ce Yocto-Color et espère sincèrement qu'il vous donnera entière satisfaction. Les ingénieurs Yoctopuce se sont donnés beaucoup de mal pour que votre Yocto-Color soit facile à installer n'importe où et soit facile à piloter depuis un maximum de langages de programmation. Néanmoins, si ce module venait à vous décevoir n'hésitez pas à contacter le support Yoctopuce1.
Par design, tous les modules Yoctopuce se pilotent de la même façon, c'est pourquoi les documentations des modules de la gamme sont très semblables. Si vous avez déjà épluché la documentation d'un autre module Yoctopuce, vous pouvez directement sauter à la description des fonctions du module.
1.1. Prérequis
Pour pouvoir profiter pleinement de votre module Yocto-Color, vous devriez disposer des éléments suivants.
Un ordinateur
Les modules de Yoctopuce sont destinés à être pilotés par un ordinateur (ou éventuellement un microprocesseur embarqué). Vous écrirez vous-même le programme qui pilotera le module selon vos besoin, à l'aide des informations fournies dans ce manuel.
Yoctopuce fourni les librairies logicielles permettant de piloter ses modules pour les systèmes d'exploitation suivants: Windows, Mac OS X, Linux et Android. Les modules Yoctopuce ne nécessitent pas l'installation de driver (ou pilote) spécifiques, car ils utilisent le driver HID2 fourni en standard dans tous les systèmes d'exploitation.
Les versions de Windows actuellement supportées sont Windows XP, Windows 2003, Windows Vista, Windows 7, Windows 8 et Windows 10. Les versions 32 bit et 64 bit sont supportées. Yoctopuce teste régulièrement le bon fonctionnement des modules sur Windows 7 et Windows 10.
Les versions de Mac OS X actuellement supportées sont Mac OS X 10.9 (Maverick), 10.10 (Yosemite), 10.11 (El Capitan) et 10.12 (Sierra) Yoctopuce teste régulièrement le bon fonctionnement des modules sur Mac OS X 10.11.
Les versions de Linux supportées sont les kernels 2.6 ,3.X et 4.x. D'autre versions du kernel et même d'autres variantes d'Unix sont très susceptibles d'être utilisées sans problème, puisque le support de Linux est fait via l'API standard de la libusb, disponible aussi pour FreeBSD par exemple. Yoctopuce teste régulièrement le bon fonctionnement des modules sur un kernel Linux 3.19.
Les versions de Android actuellement supportées sont 3.1 et suivantes. De plus, il est nécessaire que la tablette ou le téléphone supporte le mode USB Host. Yoctopuce teste régulièrement le bon fonctionnement des modules avec Android 4.x sur un Nexus 7 et un Samsung Galaxy S3 avec la librairie Java pour Android.
Un cable USB de type A-micro B
Il existe trois tailles de connecteurs USB, la taille "normale" que vous utilisez probablement pour brancher votre imprimante, la taille mini encore très courante et enfin la taille micro, souvent utilisée pour raccorder les téléphones portables, pour autant qu'ils n'arborent pas une pomme. Les modules de Yoctopuce sont tous équipés d'une connectique au format micro-USB.

Les connecteurs USB 2 les plus courants: A, B, Mini B, Micro A, Micro B.
3
Pour connecter votre module Yocto-Color à un ordinateur, vous avez besoin d'un
cable USB de type A-micro B. Vous trouverez ce cable en vente à des prix très
variables selon les sources, sous la dénomination USB A to micro B Data cable.
Prenez garde à ne pas acheter par mégarde un simple câble de charge, qui ne
fournirait que le courant mais sans les fils de données.
Le bon câble est disponible sur le shop de Yoctopuce.
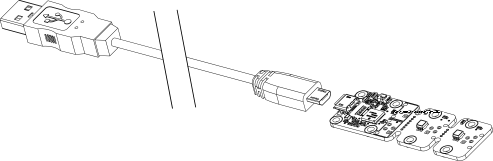
Vous devez raccorder votre module Yocto-Color à l'aide d'un cable USB de type A - micro B
Si vous branchez un hub USB entre l'ordinateur et le module Yocto-Color, prenez garde à ne pas dépasser les limites de courant imposées par USB, sous peine de faire face des comportements instables non prévisibles. Vous trouverez plus de détail à ce sujet dans le chapitre concernant le montage et la connectique.
1.2. Accessoires optionnels
Les accessoires ci-dessous ne sont pas nécessaires à l'utilisation du module Yocto-Color, mais pourraient vous être utiles selon l'utilisation que vous en faites. Il s'agit en général de produits courants que vous pouvez vous procurer chez vos fournisseurs habituels de matériel de bricolage. Pour vous éviter des recherches, ces produits sont en général aussi disponibles sur le shop de Yoctopuce.
Vis et entretoises
Pour fixer le module Yocto-Color à un support, vous pouvez placer des petites vis de 2.5mm avec une tête de 4.5mm au maximum dans les trous prévus ad-hoc. Il est conseillé de les visser dans des entretoises filetées, que vous pourrez fixer sur le support. Vous trouverez plus de détail à ce sujet dans le chapitre concernant le montage et la connectique.
Micro-hub USB
Si vous désirez placer plusieurs modules Yoctopuce dans un espace très restreint, vous pouvez les connecter ensemble à l'aide d'un micro-hub USB. Yoctopuce fabrique des hubs particulièrement petits précisément destinés à cet usage, dont la taille peut être réduite à 20mm par 36mm, et qui se montent en soudant directement les modules au hub via des connecteurs droits ou des câbles nappe. Pour plus de détail, consulter la fiche produit du micro-hub USB.
YoctoHub-Ethernet, YoctoHub-Wireless and YoctoHub-GSM
Vous pouvez ajouter une connectivité réseau à votre Yocto-Color grâce aux hubs YoctoHub-Ethernet, YoctoHub-Wireless et YoctoHub-GSM qui offrent respectivement une connectivité Ethernet, Wifi et GSM. Chacun de ces hubs peut piloter jusqu'à trois modules Yoctopuce et se comporte exactement comme un ordinateur normal qui ferait tourner un VirtualHub.
Connecteurs Picoflex et cable nappe souple
Si vous désirez séparer les leds du module Yocto-Color à l'aide d'un cable à connecteur enfichable, vous aurez besoin de cable nappe souple à 4 fils espacés de 1.27mm et de connecteurs Picoflex.4 Vous trouverez plus de détail à ce sujet dans le chapitre concernant le montage et la connectique.
Cable nappe mono-brin
Si vous désirez séparer les leds du module Yocto-Color à l'aide d'un cable nappe soudé directement aux circuit imprimé, utilisez de préférence du cable nappe étamé mono-brin: c'est le plus facile à souder. Dans tous les cas, il vous faudra 4 fils espacés de 1.27mm.
Ce même câble peut aussi être utilisé pour souder un fil directement entre le module Yocto-Color et un micro-hub USB pour éviter l'encombrement d'un cable USB.
2. Présentation
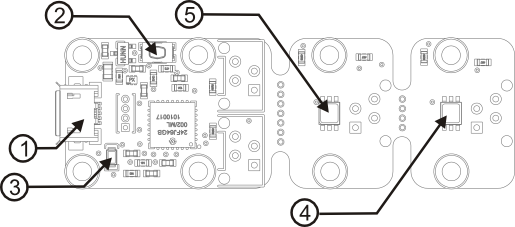
| 1: | Prise USB micro-B | 4: | Led RGB 1 |
| 2: | Yocto-bouton | 5: | Led RGB 2 |
| 3: | Yocto-led |
2.1. Les éléments communs
Tous les Yocto-modules ont un certain nombre de fonctionnalités en commun.
Le connecteur USB
Les modules de Yoctopuce sont tous équipés d'une connectique au format micro-USB. Les câbles correspondants ne sont pas forcément les plus faciles à trouver, mais ces connecteurs ont l'avantage d'occuper un minimum de place.
Attention le connecteur USB est simplement soudé en surface et peut être arraché si la prise USB venait à faire levier. Si les pistes sont restées en place, le connecteur peut être ressoudé à l'aide d'un bon fer et de flux. Alternativement, vous pouvez souder un fil USB directement dans les trous espacés de 1.27mm prévus à cet effet, prêt du connecteur.
Le Yocto-bouton
Le Yocto-bouton a deux fonctions. Premièrement, il permet d'activer la Yocto-balise (voir la Yocto-led ci-dessous). Deuxièmement, si vous branchez un Yocto-module en maintenant ce bouton appuyé, il vous sera possible de reprogrammer son firmware avec une nouvelle version. Notez qu'il existe une méthode plus simple pour mettre à jour le firmware depuis l'interface utilisateur, mais cette méthode-là peut fonctionner même lorsque le firmware chargé sur le module est incomplet ou corrompu.
La Yocto-Led
En temps normal la Yocto-Led sert à indiquer le bon fonctionnement du module: elle émet alors une faible lumière bleue qui varie lentement mimant ainsi une respiration. La Yocto-Led cesse de respirer lorsque le module ne communique plus, par exemple si il est alimenté par un hub sans connexion avec un ordinateur allumé.
Lorsque vous appuyez sur le Yocto-bouton, la Led passe en mode Yocto-balise: elle se met alors à flasher plus vite et beaucoup plus fort, dans le but de permettre une localisation facile d'un module lorsqu'on en a plusieurs identiques. Il est en effet possible de déclencher la Yocto-balise par logiciel, tout comme il est possible de détecter par logiciel une Yocto-balise allumée.
La Yocto-Led a une troisième fonctionnalité moins plaisante: lorsque ce logiciel interne qui contrôle le module rencontre une erreur fatale, elle se met à flasher SOS en morse5. Si cela arrivait débranchez puis rebranchez le module. Si le problème venait à se reproduire vérifiez que le module contient bien la dernière version du firmware, et dans l'affirmative contactez le support Yoctopuce6.
La sonde de courant
Chaque Yocto-module est capable de mesurer sa propre consommation de courant sur le bus USB. La distribution du courant sur un bus USB étant relativement critique, cette fonctionnalité peut être d'un grand secours. La consommation de courant du module est consultable par logiciel uniquement.
Le numéro de série
Chaque Yocto-module a un numéro de série unique attribué en usine, pour les modules Yocto-Color ce numéro commence par YRGBLED1. Le module peut être piloté par logiciel en utilisant ce numéro de série. Ce numéro de série ne peut pas être changé.
Le nom logique
Le nom logique est similaire au numéro de série, c'est une chaine de caractère sensée être unique qui permet référencer le module par logiciel. Cependant, contrairement au numéro de série, le nom logique peut être modifié à volonté. L'intérêt est de pouvoir fabriquer plusieurs exemplaire du même projet sans avoir à modifier le logiciel de pilotage. Il suffit de programmer les même noms logique dans chaque exemplaire. Attention le comportement d'un projet devient imprévisible s'il contient plusieurs modules avec le même nom logique et que le logiciel de pilotage essaye d'accéder à l'un de ces module à l'aide de son nom logique. A leur sortie d'usine, les modules n'ont pas de nom logique assigné, c'est à vous de le définir.
2.2. Les éléments spécifiques
Les deux leds RGB
Ces deux leds ont la particularité de pouvoir émettre trois couleurs différentes: rouge, vert et bleu. Il s'agit en fait de trois leds distinctes logées dans le même boîtier. En modulant précisément la puissance de chacune ces trois leds il est possible de créer a peu près n'importe quelle couleurs, blanc compris.
3. Premiers pas
Arrivé à ce chapitre votre Yocto-Color devrait être branché à votre ordinateur, qui devrait l'avoir reconnu. Il est temps de le faire fonctionner.
Rendez-vous sur le site de Yoctopuce et téléchargez le programme Virtual Hub7, Il est disponible pour Windows, Linux et Mac OS X. En temps normal le programme Virtual Hub sert de couche d'abstraction pour les langages qui ne peuvent pas accéder aux couches matérielles de votre ordinateur. Mais il offre aussi une interface sommaire pour configurer vos modules et tester les fonctions de base, on accède à cette interface à l'aide d'un simple browser web 8. Lancez le Virtual Hub en ligne de commande, ouvrez votre browser préféré et tapez l'adresse http://127.0.0.1:4444. Vous devriez voir apparaître la liste des modules Yoctopuce raccordés à votre ordinateur.
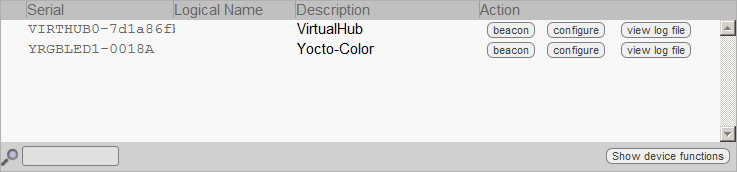
Liste des modules telle qu'elle apparaît dans votre browser.
3.1. Localisation
Il est alors possible de localiser physiquement chacun des modules affichés en cliquant sur le bouton beacon, cela a pour effet de mettre la Yocto-Led du module correspondant en mode "balise", elle se met alors à clignoter ce qui permet de la localiser facilement. Cela a aussi pour effet d'afficher une petite pastille bleue à l'écran. Vous obtiendrez le même comportement en appuyant sur le Yocto-bouton d'un module.
3.2. Test du module
La première chose à vérifier est le bon fonctionnement de votre module: cliquez sur le numéro de série correspondant à votre module, et une fenêtre résumant les propriétés de votre Yocto-Color.
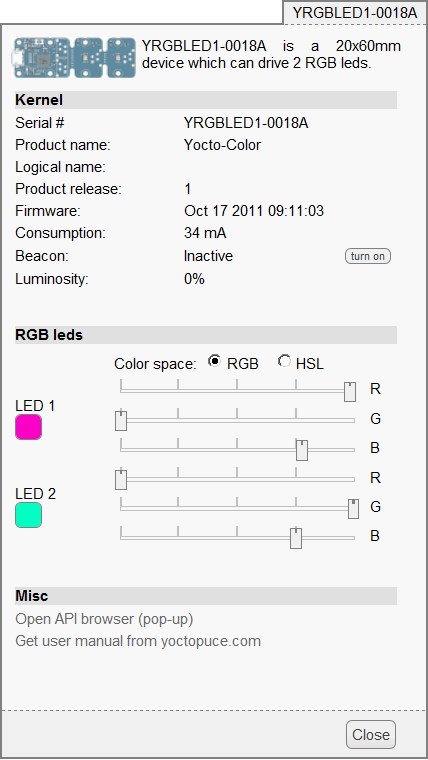
Propriétés du module Yocto-Color.
Cette fenêtre vous permet entre autres de jouer avec les deux leds RGB du module, en déplaçant les curseurs vous pouvez les couleurs affichée par les leds. Vous pouvez les piloter au choix en mode RGB ou HSL. Vous remarquerez que la consommation du module varie en fonction des valeurs affichées.
3.3. Configuration
Si, dans la liste de modules, vous cliquez sur le bouton configure correspondant à votre module, la fenêtre de configuration apparaît.
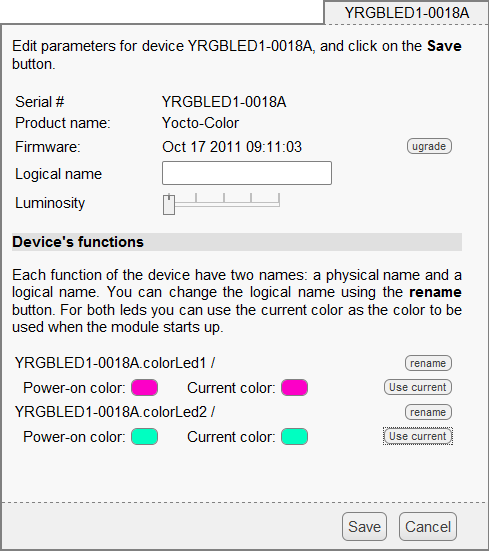
Configuration du module Yocto-Color.
Firmware
Le firmware du module peut être facilement mis à jour à l'aide de l'interface. Pour ce faire, vous devez au préalable disposer du firmware adéquat sur votre disque local. Les firmwares destinés aux modules Yoctopuce se présentent sous la forme de fichiers .byn et peuvent être téléchargés depuis le site web de Yoctopuce.
Pour mettre à jour un firmware, cliquez simplement sur le bouton upgrade de la fenêtre de configuration et suivez les instructions. Si pour une raison ou une autre, la mise à jour venait à échouer, débranchez puis rebranchez le module. Recommencer la procédure devrait résoudre alors le problème. Si le module a été débranché alors qu'il était en cours de reprogrammation, il ne fonctionnera probablement plus et ne sera plus listé dans l'interface. Mais il sera toujours possible de le reprogrammer correctement en utilisant le programme Virtual Hub9 en ligne de commande 10.
Nom logique du module
Le nom logique est un nom choisi par vous, qui vous permettra d'accéder à votre module, de la même manière qu'un nom de fichier vous permet d'accéder à son contenu. Un nom logique doit faire au maximum 19 caractères, les caractères autorisés sont les caractères A..Z a..z 0..9 _ et -. Si vous donnez le même nom logique à deux modules raccordés au même ordinateur, et que vous tentez d'accéder à l'un des modules à l'aide de ce nom logique, le comportement est indéterminé: vous n'avez aucun moyen de savoir lequel des deux va répondre.
Luminosité
Ce paramètre vous permet d'agir sur l'intensité maximale des leds présentes sur le module. Ce qui vous permet, si nécessaire, de le rendre un peu plus discret tout en limitant sa consommation. Notez que ce paramètre agit sur toutes les leds de signalisation du module, y compris la Yocto-Led. Si vous branchez un module et que rien ne s'allume, cela veut peut être dire que sa luminosité a été réglée à zéro.
Nom logique des fonctions
Chaque module Yoctopuce a un numéro de série, et un nom logique. De manière analogue, chaque fonction présente sur chaque module Yoctopuce a un nom matériel et un nom logique, ce dernier pouvant être librement choisi par l'utilisateur. Utiliser des noms logiques pour les fonctions permet une plus grande flexibilité au niveau de la programmation des modules
La seule fonction fournie par le module Yocto-Color est la fonction ColorLed, dont il existe deux instances: colorLed1 et colorLed2.
Couleur au démarrage
Cliquez sur le bouton use current pour mémoriser la couleur courante de chaque led comme couleur au démarrage. Ce réglage s'appliquera à chaque fois que le module sera remis sous tension, que ce soit par un simple chargeur USB our par un cable USB relié à un ordinateur.
Une application de cette fonction consiste à configurer la couleur de démarrage des leds à l'aide d'un ordinateur, et ensuite d'alimenter le module à l'aide d'un simple chargeur USB. Vous pouvez ainsi facilement fabriquer un éclairage dont la couleur est configurable.
4. Montage et connectique
Ce chapitre fournit des explications importantes pour utiliser votre module Yocto-Color en situation réelle. Prenez soin de le lire avant d'aller trop loin dans votre projet si vous voulez éviter les mauvaises surprises.
4.1. Fixation
Pendant la mise au point de votre projet vous pouvez vous contenter de laisser le module se promener au bout de son câble. Veillez simplement à ce qu'il ne soit pas en contact avec quoi que soit de conducteur (comme vos outils). Une fois votre projet pratiquement terminé il faudra penser à faire en sorte que vos modules ne puissent pas se promener à l'intérieur.
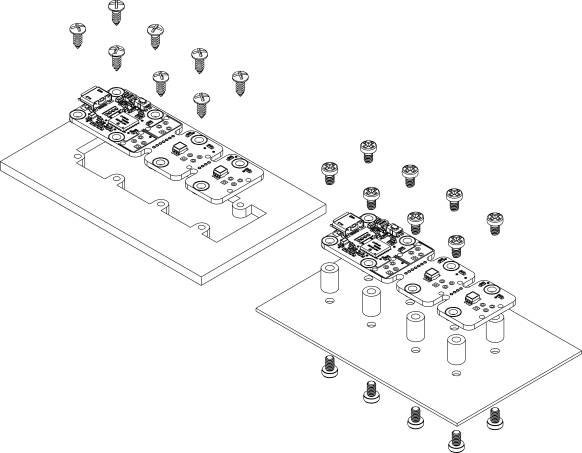
Exemples de montage sur un support.
Le module Yocto-Color dispose de trous de montage 2.5mm. Vous pouvez utiliser ces trous pour y passer des vis. Le diamètre de la tête de ces vis ne devra pas dépasser 4.5mm, sous peine d'endommager les circuits du module. Veillez à que la surface inférieure du module ne soit pas en contact avec le support. La méthode recommandée consiste à utiliser des entretoises, mais il en existe d'autres. Rien ne vous empêche de le fixer au pistolet à colle; ça ne sera pas très joli mais ça tiendra.
Si vous comptez visser votre module directement contre une paroi conductrice, un chassis métallique par exemple, intercalez une couche isolante entre les deux. Sinon vous aller à coup sûr provoquer un court-circuit: il y a des pads à nu sous votre module. Du simple ruban adhésif d'emballage devrait faire l'affaire.
4.2. Déporter les Leds
Le module Yocto-Color est conçu pour pouvoir être séparé en trois morceaux afin de vous permettre de déporter les Leds. Vous pouvez les séparer en cassant simplement le circuit, mais vous obtiendrez un meilleur résultat en utilisant une bonne paire de tenailles, ou une grosse pince coupante. Une fois les sous-modules séparés vous pouvez poncer sans risque les parties qui dépassent.
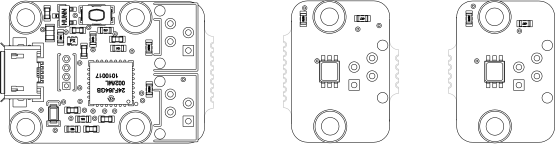
Le module Yocto-Color est conçu pour pouvoir être séparé en trois parties.
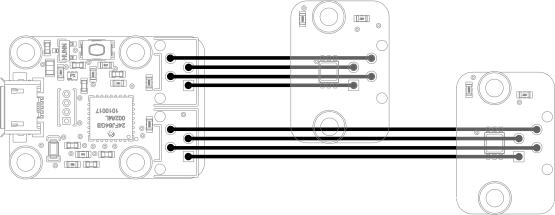
Câblage des sous module une fois ceux-ci séparés.
Une fois les modules séparés vous allez devoir les recâbler. Plusieurs solutions s'offrent à vous. Vous pouvez raccorder les sous-modules en soudant des fils électriques tout simples, c'est la solution la plus accessible mais c'est loin d'être la plus pratique. Vous pouvez utiliser du cable nappe au pas 1.27 mm. Utilisez de préférence du cable avec des conducteurs mono-brin plutôt que du multi-brin: les câble mono-brin sont un peu moins souple, mais nettement plus facile a souder. Bien que pratique la soudure directe des câbles rend le résultat difficile à démonter. C'est pourquoi le module Yocto-Color a été conçu pour utiliser des connecteurs Picoflex de Molex11. Ce système est largement disponible, relativement bon marché, et permet de fabriquer des solutions professionnelles sur mesure compactes et surtout démontables .
Câblage des sous-modules à l'aide de connecteurs Picoflex
Vous n'êtes pas obligé de de raccorder les deux leds, le module fonctionnera parfaitement si une seule des deux leds est raccordée. Les deux sous-modules sont interchangeables: vous pouvez raccorder chaque sous-module à n'importe lequel des connecteurs du contrôleur. Il n'y a pas de moyen logiciel direct de savoir si les leds sont raccordées au module de contrôle; mais il est possible de se faire une idée en testant les variations de consommation du module: si vous donnez l'ordre d'allumer une led et que la consommation augmente, cela signifie que le sous-module correspondant est présent.
Attention, les modules Yoctopuce sécables ont souvent des systèmes de connectique très semblables. Cependant les sous-modules ne sont pas du tout compatibles entre modèles différents. Si vous raccordez un sous module de votre Yocto-Color à un autre type de module, par exemple un Yocto-Temperature, cela ne marchera pas, et vous risquez fort d'endommager votre matériel.
4.3. Contraintes d'alimentation par USB
Bien que USB signifie Universal Serial BUS, les périphériques USB ne sont pas organisés physiquement en bus mais en arbre, avec des connections point-à-point. Cela a des conséquences en termes de distribution électrique: en simplifiant, chaque port USB doit alimenter électriquement tous les périphériques qui lui sont directement ou indirectement connectés. Et USB impose des limites.
En théorie, un port USB fournit 100mA, et peut lui fournir (à sa guise) jusqu'à 500mA si le périphérique les réclame explicitement. Dans le cas d'un hub non-alimenté, il a droit à 100mA pour lui-même et doit permettre à chacun de ses 4 ports d'utiliser 100mA au maximum. C'est tout, et c'est pas beaucoup. Cela veut dire en particulier qu'en théorie, brancher deux hub USB non-alimentés en cascade ne marche pas. Pour cascader des hubs USB, il faut utiliser des hubs USB alimentés, qui offriront 500mA sur chaque port.
En pratique, USB n'aurait pas eu le succès qu'il a si il était si contraignant. Il se trouve que par économie, les fabricants de hubs omettent presque toujours d'implémenter la limitation de courant sur les ports: ils se contentent de connecter l'alimentation de tous les ports directement à l'ordinateur, tout en se déclarant comme hub alimenté même lorsqu'ils ne le sont pas (afin de désactiver tous les contrôles de consommation dans le système d'exploitation). C'est assez malpropre, mais dans la mesure où les ports des ordinateurs sont eux en général protégés par une limitation de courant matérielle vers 2000mA, ça ne marche pas trop mal, et cela fait rarement des dégâts.
Ce que vous devez en retenir: si vous branchez des modules Yoctopuce via un ou des hubs non alimentés, vous n'aurez aucun garde-fou et dépendrez entièrement du soin qu'aura mis le fabricant de votre ordinateur pour fournir un maximum de courant sur les ports USB et signaler les excès avant qu'ils ne conduisent à des pannes ou des dégâts matériels. Si les modules sont sous-alimentés, ils pourraient avoir un comportement bizarre et produire des pannes ou des bugs peu reproductibles. Si vous voulez éviter tout risque, ne cascadez pas les hubs non-alimentés, et ne branchez pas de périphérique consommant plus de 100mA derrière un hub non-alimenté.
Pour vous faciliter le contrôle et la planification de la consommation totale de votre projet, tous les modules Yoctopuce sont équipés d'une sonde de courant qui indique (à 5mA près) la consommation du module sur le bus USB.
5. Programmation, concepts généraux
L'API Yoctopuce a été pensée pour être à la fois simple à utiliser, et suffisamment générique pour que les concepts utilisés soient valables pour tous les modules de la gamme Yoctopuce et ce dans tous les langages de programmation disponibles. Ainsi, une fois que vous aurez compris comment piloter votre Yocto-Color dans votre langage de programmation favori, il est très probable qu'apprendre à utiliser un autre module, même dans un autre langage, ne vous prendra qu'un minimum de temps.
5.1. Paradigme de programmation
L'API Yoctopuce est une API orientée objet. Mais dans un souci de simplicité, seules les bases de la programmation objet ont été utilisées. Même si la programmation objet ne vous est pas familière, il est peu probable que cela vous soit un obstacle à l'utilisation des produits Yoctopuce. Notez que vous n'aurez jamais à allouer ou désallouer un objet lié à l'API Yoctopuce: cela est géré automatiquement.
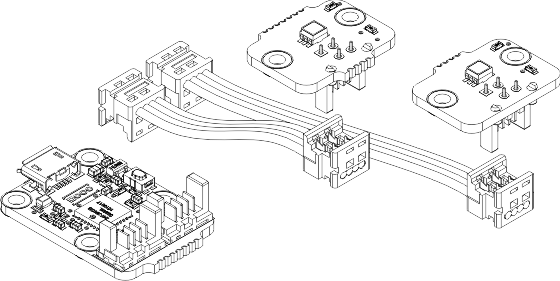
Il existe une classe par type de fonctionnalité Yoctopuce. Le nom de ces classes commence toujours par un Y suivi du nom de la fonctionnalité, par exemple YTemperature, YRelay, YPressure, etc.. Il existe aussi une classe YModule, dédiée à la gestion des modules en temps que tels, et enfin il existe la classe statique YAPI, qui supervise le fonctionnement global de l'API et gère les communications à bas niveau.
Structure de l'API Yoctopuce.
La classe YSensor
A chaque fonctionnalité d'un module Yoctopuce, correspond une classe: YTemperature pour mesurer la température, YVoltage pour mesurer une tension, YRelay pour contrôler un relais, etc. Il existe cependant une classe spéciale qui peut faire plus: YSensor.
Cette classe YSensor est la classe parente de tous les senseurs Yoctopuce, elle permet de contrôler n'importe quel senseur, quel que soit son type, en donnant accès au fonctions communes à tous les senseurs. Cette classe permet de simplifier la programmation d'applications qui utilisent beaucoup de senseurs différents. Mieux encore, si vous programmez une application basée sur la classe YSensor elle sera compatible avec tous les senseurs Yoctopuce, y compris ceux qui n'existent pas encore.
Programmation
Dans l'API Yoctopuce, la priorité a été mise sur la facilité d'accès aux fonctionnalités des modules en offrant la possibilité de faire abstraction des modules qui les implémentent. Ainsi, il est parfaitement possible de travailler avec un ensemble de fonctionnalités sans jamais savoir exactement quel module les héberge au niveau matériel. Cela permet de considérablement simplifier la programmation de projets comprenant un nombre important de modules.
Du point de vue programmation, votre Yocto-Color se présente sous la forme d'un module hébergeant un certain nombre de fonctionnalités. Dans l'API , ces fonctionnalités se présentent sous la forme d'objets qui peuvent être retrouvés de manière indépendante, et ce de plusieurs manières.
Accès aux fonctionnalités d'un module
Accès par nom logique
Chacune des fonctionnalités peut se voir assigner un nom logique arbitraire et persistant: il restera stocké dans la mémoire flash du module, même si ce dernier est débranché. Un objet correspondant à une fonctionnalité Xxx munie d'un nom logique pourra ensuite être retrouvée directement à l'aide de ce nom logique et de la méthode YXxx.FindXxx. Notez cependant qu'un nom logique doit être unique parmi tous les modules connectés.
Accès par énumération
Vous pouvez énumérer toutes les fonctionnalités d'un même type sur l'ensemble des modules connectés à l'aide des fonctions classiques d'énumération FirstXxx et nextXxxx disponibles dans chacune des classes YXxx.
Accès par nom hardware
Chaque fonctionnalité d'un module dispose d'un nom hardware, assigné en usine qui ne peut être modifié. Les fonctionnalités d'un module peuvent aussi être retrouvées directement à l'aide de ce nom hardware et de la fonction YXxx.FindXxx de la classe correspondante.
Différence entre Find et First
Les méthodes YXxx.FindXxxx et YXxx.FirstXxxx ne fonctionnent pas exactement de la même manière. Si aucun module n'est disponible YXxx.FirstXxxx renvoie une valeur nulle. En revanche, même si aucun module ne correspond, YXxx.FindXxxx renverra objet valide, qui ne sera pas "online" mais qui pourra le devenir, si le module correspondant est connecté plus tard.
Manipulation des fonctionnalités
Une fois l'objet correspondant à une fonctionnalité retrouvé, ses méthodes sont disponibles de manière tout à fait classique. Notez que la plupart de ces sous-fonctions nécessitent que le module hébergeant la fonctionnalité soit branché pour pouvoir être manipulées. Ce qui n'est en général jamais garanti, puisqu'un module USB peut être débranché après le démarrage du programme de contrôle. La méthode isOnline(), disponible dans chaque classe, vous sera alors d'un grand secours.
Accès aux modules
Bien qu'il soit parfaitement possible de construire un projet en faisant abstraction de la répartition des fonctionnalités sur les différents modules, ces derniers peuvent être facilement retrouvés à l'aide de l'API. En fait, ils se manipulent d'une manière assez semblable aux fonctionnalités. Ils disposent d'un numéro de série affecté en usine qui permet de retrouver l'objet correspondant à l'aide de YModule.Find(). Les modules peuvent aussi se voir affecter un nom logique arbitraire qui permettra de les retrouver ensuite plus facilement. Et enfin la classe YModule comprend les méthodes d'énumération YModule.FirstModule() et nextModule() qui permettent de dresser la liste des modules connectés.
Interaction Function / Module
Du point de vue de l'API, les modules et leurs fonctionnalités sont donc fortement décorrélés à dessein. Mais l'API offre néanmoins la possibilité de passer de l'un à l'autre. Ainsi la méthode get_module(), disponible dans chaque classe de fonctionnalité, permet de retrouver l'objet correspondant au module hébergeant cette fonctionnalité. Inversement, la classe YModule dispose d'un certain nombre de méthodes permettant d'énumérer les fonctionnalités disponibles sur un module.
5.2. Le module Yocto-Color
Le module Yocto-Color offre deux instances de la fonction ColorLed, correspondant aux deux leds RGB du module.
module : Module
| attribut | type | modifiable ? |
|---|---|---|
| productName | Texte | lecture seule |
| serialNumber | Texte | lecture seule |
| logicalName | Texte | modifiable |
| productId | Entier (hexadécimal) | lecture seule |
| productRelease | Entier (hexadécimal) | lecture seule |
| firmwareRelease | Texte | lecture seule |
| persistentSettings | Type énuméré | modifiable |
| luminosity | 0..100% | modifiable |
| beacon | On/Off | modifiable |
| upTime | Temps | lecture seule |
| usbCurrent | Courant consommé (en mA) | lecture seule |
| rebootCountdown | Nombre entier | modifiable |
| userVar | Nombre entier | modifiable |
colorLed1 : ColorLed
colorLed2 : ColorLed
| attribut | type | modifiable ? |
|---|---|---|
| logicalName | Texte | modifiable |
| advertisedValue | Texte | modifiable |
| rgbColor | Entier (24 bits) | modifiable |
| hslColor | Entier (24 bits) | modifiable |
| rgbMove | Agrégat | modifiable |
| hslMove | Agrégat | modifiable |
| rgbColorAtPowerOn | Entier (24 bits) | modifiable |
| blinkSeqSize | Nombre entier | lecture seule |
| blinkSeqMaxSize | Nombre entier | lecture seule |
| blinkSeqSignature | Nombre entier | lecture seule |
| command | Texte | modifiable |
5.3. Interface de contrôle du module
Cette interface est la même pour tous les modules USB de Yoctopuce. Elle permet de contrôler les paramètres généraux du module, et d'énumérer les fonctions fournies par chaque module.
productName
Chaîne de caractères contenant le nom commercial du module, préprogrammé en usine.
serialNumber
Chaine de caractères contenant le numéro de série, unique et préprogrammé en usine. Pour un module Yocto-Color, ce numéro de série commence toujours par YRGBLED1. Il peut servir comme point de départ pour accéder par programmation à un module particulier.
logicalName
Chaine de caractères contenant le nom logique du module, initialement vide. Cet attribut peut être changé au bon vouloir de l'utilisateur. Une fois initialisé à une valeur non vide, il peut servir de point de départ pour accéder à un module particulier. Si deux modules avec le même nom logique se trouvent sur le même montage, il n'y a pas moyen de déterminer lequel va répondre si l'on tente un accès par ce nom logique. Le nom logique du module est limité à 19 caractères parmi A..Z,a..z,0..9,_ et -.
productId
Identifiant USB du module, préprogrammé à la valeur 20 en usine.
productRelease
Numéro de révision du module hardware, préprogrammé en usine.
firmwareRelease
Version du logiciel embarqué du module, elle change à chaque fois que le logiciel embarqué est mis à jour.
persistentSettings
Etat des réglages persistants du module: chargés depuis la mémoire non-volatile, modifiés par l'utilisateur ou sauvegardés dans la mémoire non volatile.
luminosity
Intensité lumineuse maximale des leds informatives (comme la Yocto-Led) présentes sur le module. C'est une valeur entière variant entre 0 (leds éteintes) et 100 (leds à l'intensité maximum). La valeur par défaut est 50. Pour changer l'intensité maximale des leds de signalisation du module, ou les éteindre complètement, il suffit donc de modifier cette valeur.
beacon
Etat de la balise de localisation du module.
upTime
Temps écoulé depuis la dernière mise sous tension du module.
usbCurrent
Courant consommé par le module sur le bus USB, en milli-ampères.
rebootCountdown
Compte à rebours pour déclencher un redémarrage spontané du module.
userVar
Attribut de type entier 32 bits à disposition de l'utilisateur.
5.4. Interface de la fonction ColorLed
La librairie de programmation Yoctopuce permet de piloter une LED couleur aussi bien en coordonnées RGB qu'en coordonnées HSL, les conversions RGB vers HSL étant faites automatiquement par le module. Ceci permet aisément d'allumer la LED avec une certaine teinte et d'en faire progressivement varier la saturation ou la luminosité. Si nécessaire, vous trouverez plus d'information sur la différence entre RGB et HSL dans la section suivante.
logicalName
Chaîne de caractères contenant le nom logique de la LED RGB, initialement vide. Cet attribut peut être changé au bon vouloir de l'utilisateur. Un fois initialisé à une valeur non vide, il peut servir de point de départ pour accéder à directement à la LED RGB. Si deux LEDs RGB portent le même nom logique dans un projet, il n'y a pas moyen de déterminer lequel va répondre si l'on tente un accès par ce nom logique. Le nom logique du module est limité à 19 caractères parmi A..Z,a..z,0..9,_ et -.
advertisedValue
Courte chaîne de caractères résumant l'état actuel de la LED RGB, et qui sera publiée automatiquement jusqu'au hub parent. Pour une LED RGB, la valeur publiée est la couleur RGB de la LED (6 digits hexadécimaux).
rgbColor
Couleur courante de la LED, sous la forme d'un entier encodé en RGB. Pour en extraire les composantes rouges verte et bleus il faut pour le rouge: faire un shift a droite de 16 bit, pour le vert faire un shift à droite de 8 bit et ne garder que les 8 bits de droite, pour le bleu ne garder que les 8 bits de droite.
hslColor
Couleur courante de la LED (comme rgbColor), mais exprimée dans le système de couleur HSL.
rgbMove
Permet de faire passer la LED de la couleur courante à une autre de manière continue et indépendante. La valeur est un agrégat comprenant la couleur cible encodée en RGB dans un entier, et une durée en millisecondes.
hslMove
Fonctionne de manière identique à rgbMove, mais en utilisant le système de couleurs HSL. En HSL, la teinte étant une valeur circulaire (0..360°) il y a toujours deux manières d'opérer la transition: en augmentant ou en diminuant le teinte. Le module optera pour la transition passant par le chemin le plus court. dans le cas d'une différence d'exactement 180°, il optera pour la transition qui augmente la valeur de la teinte.

En HSL, le module choisit la transition de teinte la plus courte. Dans le cas d'une
différence de 180° la transition se fera dans le sens horaire.
rgbColorAtPowerOn
Couleur de la LED à rétablir lors la mise sous tension du module.
blinkSeqSize
Taille actuelle de la séquence de clignotement
blinkSeqMaxSize
Taille maximale de la séquence de clignotement
blinkSeqSignature
Signature de la séquence de clignotement
command
Attribut magique permettant d'envoyer des commandes avancées au module. Si une commande n'est pas interprétée comme attendue, consultez les logs du module.
5.5. Les espaces de couleurs: RGB et HSL
Espace RGB
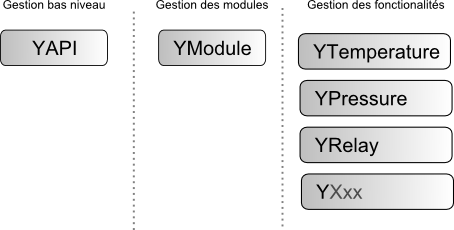
Il existe plusieurs manières de définir une couleur. La plus connue consiste à utiliser ses composantes Rouge, Verte, et Bleue (RGB en anglais). Chaque couleur peut en effet être définie comme un mélange des trois couleurs primaires. Malheureusement ce système est assez difficile à manipuler avec précision dès qu'il s'agit de définir une couleur non saturée. Obtenir du rose bonbon par exemple, demande pas mal de tâtonnements avant d'arriver au résultat escompté.
L'espace de couleur RGB, il est souvent représenté sous la forme d'un cube.
En informatique on a l'habitude de définir une couleur RGB comme un triplet 0..255 exprimé en hexadécimal12. Ainsi le rouge pur est défini par 0xFF0000, le vert pur 0x00FF00, le bleu pur 0x0000FF, le noir 000000, le blanc 0xFFFFFF etc. Cette notation est, entre autres, utilisés en HTML pour définir les couleurs, on utilise alors le # comme préfixe au lieu du 0x.
Espace HSL
Il existe une autre manière, un peu plus simple, de définir une couleur. Elle consiste à décomposer une couleur en Teinte, Saturation et Luminosité (HSL en anglais). La teinte est définie de 0 à 360° et passe successivement par le rouge (0°) le jaune (60°), le vert (120°) le cyan (180°) le bleu (240°), le magenta (300°) pour finalement revenir au rouge (360°). La saturation, définie de 0 à 100%, décrit l'intensité de la couleur, plus on se rapproche du 0% plus la couleur parait délavée, plus on s'approche du 100% plus la couleur apparaît éclatante. La luminosité, définie de 0 a 100%, décrit la clarté de la couleur, elle devient plus sombre quand on se rapproche du 0% et devient plus claire quand on se rapproche du 100%. Lorsqu'on utilise ce système il est beaucoup assez facile de prévoir comment va évoluer une couleur quand on manipule une de ces coordonnées. Ce qui est loin d'être le cas avec le système RGB.
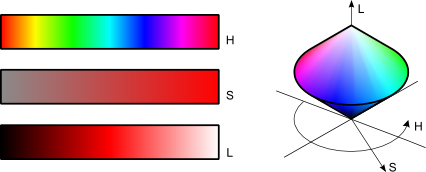
L'espace de couleur HSL, il souvent représenté sous la forme d'un double cone,
dont la base est noire (L=0%) et la pointe supérieure est blanche (L=100%). La
teinte est mappée sur le circonférence et la saturation sur le rayon.
En informatique on a tendance a normaliser les coordonnées HSL sur une gamme 0..255 et on représente une couleur HSL sous la forme d'un triplet hexadécimal. Ainsi 00FF80 représente le rouge pur, F0FF80 représente le bleu pur. Il est à noter que dans ce système, plusieurs notations différentes peuvent représenter la même couleur. Ainsi toutes les notations se terminant par 00 représentent le noir, toutes les notations se terminant par FF représentent le blanc. Une notation dont la saturation est zéro représente du gris, quelque soit la valeur de la teinte.
5.6. Quelle interface: Native, DLL ou Service?
Il y existe plusieurs méthodes pour contrôler un module USB Yoctopuce depuis un programme.
Contrôle natif
Dans ce cas de figure le programme pilotant votre projet est directement compilé avec une librairie qui offre le contrôle des modules. C'est objectivement la solution la plus simple et la plus élégante pour l'utilisateur final. Il lui suffira de brancher le câble USB et de lancer votre programme pour que tout fonctionne. Malheureusement, cette technique n'est pas toujours disponible ou même possible.
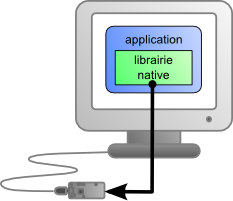
L'application utilise la librairie native pour contrôler le module connecté en local
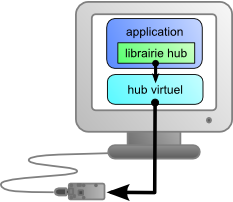
Contrôle natif par DLL
Ici l'essentiel du code permettant de contrôler les modules se trouve dans une DLL, et le programme est compilé avec une petite librairie permettant de contrôler cette DLL. C'est la manière la plus rapide pour coder le support des modules dans un language particulier. En effet la partie "utile" du code de contrôle se trouve dans la DLL qui est la même pour tous les langages, offrir le support pour un nouveau langage se limite à coder la petite librairie qui contrôle la DLL. Du point de de l'utilisateur final, il y a peu de différence: il faut simplement être sur que la DLL sera installée sur son ordinateur en même temps que le programme principal.

L'application utilise la DLL pour contrôler nativement le module connecté en local
Contrôle par un service
Certain langages ne permettent tout simplement pas d'accéder facilement au niveau matériel de la machine. C'est le cas de Javascript par exemple. Pour gérer ce cas Yoctopuce offre la solution sous la forme d'un petit service, appelé VirtualHub qui lui est capable d'accéder aux modules, et votre application n'a plus qu'à utiliser une librairie qui offrira toutes les fonctions nécessaires au contrôle des modules en passant par l'intermédiaire de ce VirtualHub. L'utilisateur final se verra obligé de lancer le VirtualHub avant de lancer le programme de contrôle du projet proprement dit, à moins qu'il ne décide d'installer le VirtualHub sous la forme d'un service/démon, auquel cas le VirtualHub se lancera automatiquement au démarrage de la machine..
L'application se connecte au service VirtualHub pour connecter le module.
En revanche la méthode de contrôle par un service offre un avantage non négligeable: l'application n'est pas n'obligé de tourner sur la machine où se trouvent les modules: elle peut parfaitement se trouver sur un autre machine qui se connectera au service pour piloter les module. De plus les librairie natives et DLL évoquées plus haut sont aussi capables de se connecter à distance à un ou plusieurs VirtualHub.
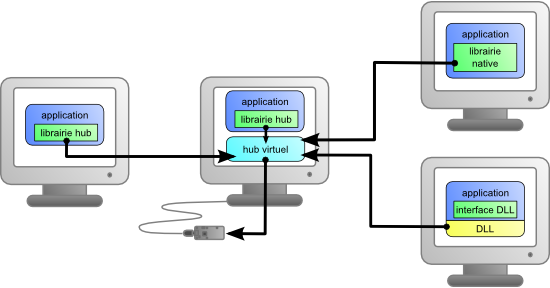
Lorsqu'on utilise un VirtualHub, l'application de contrôle n'a plus besoin
d'être sur la même machine que le module.
Quel que soit langage de programmation choisi et le paradigme de contrôle utilisé; la programmation reste strictement identique. D'un langage à l'autre les fonctions ont exactement le même nom, prennent les mêmes paramètres. Les seules différences sont liées aux contraintes des langages eux-mêmes.
| Language | Natif | Natif avec .DLL/.so | Hub virtuel |
|---|---|---|---|
| C++ | ✔ | ✔ | ✔ |
| Objective-C | ✔ | - | ✔ |
| Delphi | - | ✔ | ✔ |
| Python | - | ✔ | ✔ |
| VisualBasic .Net | - | ✔ | ✔ |
| C# .Net | - | ✔ | ✔ |
| EcmaScript / JavaScript | - | - | ✔ |
| PHP | - | - | ✔ |
| Java | - | ✔ | ✔ |
| Java pour Android | ✔ | - | ✔ |
| Ligne de commande | ✔ | - | ✔ |
Méthode de support pour les différents langages.
Limitation des librairies Yoctopuce
Les librairies Natives et DLL ont une limitation technique. Sur une même machine, vous ne pouvez pas faire tourner en même temps plusieurs applications qui accèdent nativement aux modules Yoctopuce. Si vous désirez contrôler plusieurs projets depuis la même machine, codez vos applications pour qu'elle accèdent aux modules via un VirtualHub plutôt que nativement. Le changement de mode de fonctionnement est trivial: il suffit de changer un paramètre dans l'appel à yRegisterHub().
5.7. Programmation, par où commencer?
Arrivé à ce point du manuel, vous devriez connaître l'essentiel de la théorie à propos de votre Yocto-Color. Il est temps de passer à la pratique. Il vous faut télécharger la librairie Yoctopuce pour votre language de programmation favori depuis le site web de Yoctopuce13. Puis sautez directement au chapitre correspondant au langage de programmation que vous avez choisi.
Tous les exemples décrits dans ce manuel sont présents dans les librairies de programmation. Dans certains langages, les librairies comprennent aussi quelques applications graphiques complètes avec leur code source.
Une fois que vous maîtriserez la programmation de base de votre module, vous pourrez vous intéresser au chapitre concernant la programmation avancée qui décrit certaines techniques qui vous permettront d'exploiter au mieux votre Yocto-Color.
6. Utilisation du Yocto-Color en ligne de commande
Lorsque vous désirez effectuer une opération ponctuelle sur votre Yocto-Color, comme la lecture d'une valeur, le changement d'un nom logique, etc.. vous pouvez bien sur utiliser le Virtual Hub, mais il existe une méthode encore plus simple, rapide et efficace: l'API en ligne de commande.
L'API en ligne de commande se présente sous la forme d'un ensemble d'exécutables, un par type de fonctionnalité offerte par l'ensemble des produits Yoctopuce. Ces exécutables sont fournis pré-compilés pour toutes les plateformes/OS officiellement supportés par Yoctopuce. Bien entendu, les sources de ces exécutables sont aussi fournies14.
6.1. Installation
Téléchargez l'API en ligne de commande15. Il n'y a pas de programme d'installation à lancer, copiez simplement les exécutables correspondant à votre plateforme/OS dans le répertoire de votre choix. Ajoutez éventuellement ce répertoire à votre variable environnement PATH pour avoir accès aux exécutables depuis n'importe où. C'est tout, il ne vous reste plus qu'à brancher votre Yocto-Color, ouvrir un shell et commencer à travailler en tapant par exemple:
Sous Linux, pour utiliser l'API en ligne de commande, vous devez soit être root, soit définir une règle udev pour votre système. Vous trouverez plus de détails au chapitre Problèmes courants.
6.2. Utilisation: description générale
Tous les exécutables de l'API en ligne de commande fonctionnent sur le même principe: ils doivent être appelés de la manière suivante:
C:\>Executable [options] [cible] commande [paramètres]
Les [options] gèrent le fonctionnement global des commandes , elles permettent par exemple de piloter des modules à distance à travers le réseau, ou encore elles peuvent forcer les modules à sauver leur configuration après l'exécution de la commande.
La [cible] est le nom du module ou de la fonction auquel la commande va s'appliquer. Certaines commandes très génériques n'ont pas besoin de cible. Vous pouvez aussi utiliser les alias "any" ou "all", ou encore une liste de noms, séparés par des virgules, sans espace.
La commande est la commande que l'on souhaite exécuter. La quasi-totalité des fonctions disponibles dans les API de programmation classiques sont disponibles sous forme de commandes. Vous n'êtes pas obligé des respecter les minuscules/majuscules et les caractères soulignés dans le nom de la commande.
Les [paramètres] sont, assez logiquement, les paramètres dont la commande a besoin.
A tout moment les exécutables de l'API en ligne de commande sont capables de fournir une aide assez détaillée: Utilisez par exemple
C:\>executable /help
pour connaître la liste de commandes disponibles pour un exécutable particulier de l'API en ligne de commande, ou encore:
C:\>executable commande /help
Pour obtenir une description détaillée des paramètres d'une commande.
6.3. Contrôle de la fonction ColorLed
Pour contrôler la fonction ColorLed de votre Yocto-Color, vous avez besoin de l'exécutable YColorLed.
Vous pouvez par exemple lancer:
Cet exemple utilise la cible "any" pour signifier que l'on désire travailler sur la première fonction ColorLed trouvée parmi toutes celles disponibles sur les modules Yoctopuce accessibles au moment de l'exécution. Cela vous évite d'avoir à connaître le nom exact de votre fonction et celui de votre module.
Mais vous pouvez tout aussi bien utiliser des noms logiques que vous auriez préalablement configurés. Imaginons un module Yocto-Color avec le numéros de série YRGBLED1-123456 que vous auriez appelé "MonModule" et dont vous auriez nommé la fonction colorLed1 "MaFonction", les cinq appels suivants seront strictement équivalents (pour autant que MaFonction ne soit définie qu'une fois, pour éviter toute ambiguïté).
C:\>YColorLed YRGBLED1-123456.colorLed1 describe
C:\>YColorLed YRGBLED1-123456.MaFonction describe
C:\>YColorLed MonModule.colorLed1 describe
C:\>YColorLed MonModule.MaFonction describe
C:\>YColorLed MaFonction describe
Pour travailler sur toutes les fonctions ColorLed à la fois, utilisez la cible "all".
C:\>YColorLed all describe
Pour plus de détails sur les possibilités de l'exécutableYColorLed, utilisez:
C:\>YColorLed /help
6.4. Contrôle de la partie module
Chaque module peut être contrôlé d'une manière similaire à l'aide de l'exécutable YModule. Par exemple, pour obtenir la liste de tous les modules connectés, utilisez:
C:\>YModule inventory
Vous pouvez aussi utiliser la commande suivante pour obtenir une liste encore plus détaillée des modules connectés:
C:\>YModule all describe
Chaque propriété xxx du module peut être obtenue grâce à une commande du type get_xxxx(), et les propriétés qui ne sont pas en lecture seule peuvent être modifiées à l'aide de la commande set_xxx(). Par exemple:
C:\>YModule YRGBLED1-12346 set_logicalName MonPremierModule
C:\>YModule YRGBLED1-12346 get_logicalName
Modifications des réglages du module
Lorsque que vous souhaitez modifier les réglages d'un module, il suffit d'utiliser la commande set_xxx correspondante, cependant cette modification n'a lieu que dans la mémoire vive du module: si le module redémarre, les modifications seront perdues. Pour qu'elle soient mémorisées de manière persistante, il est nécessaire de demander au module de sauvegarder sa configuration courante dans sa mémoire non volatile. Pour cela il faut utiliser la commande saveToFlash. Inversement il est possible de forcer le module à oublier ses réglages courants en utilisant la méthode revertFromFlash. Par exemple:
C:\>YModule YRGBLED1-12346 set_logicalName MonPremierModule
C:\>YModule YRGBLED1-12346 saveToFlash
Notez que vous pouvez faire la même chose en seule fois à l'aide de l'option -s
C:\>YModule -s YRGBLED1-12346 set_logicalName MonPremierModule
Attention, le nombre de cycles d'écriture de la mémoire non volatile du module est limité. Passé cette limite plus rien ne garantit que la sauvegarde des réglages se passera correctement. Cette limite, liée à la technologie employée par le micro-processeur du module se situe aux alentour de 100000 cycles. Pour résumer vous ne pouvez employer la commande saveToFlash que 100000 fois au cours de la vie du module. Veillez donc à ne pas appeler cette commande depuis l'intérieur d'une boucle.
6.5. Limitations
L'API en ligne de commande est sujette à la même limitation que les autres API: il ne peut y avoir q'une seule application à la fois qui accède aux modules de manière native. Par défaut l'API en ligne de commande fonctionne en natif.
Cette limitation peut aisément être contournée en utilisant un Virtual Hub: il suffit de faire tourner le VirtualHub16 sur la machine concernée et d'utiliser les executables de l'API en ligne de commande avec l'option -r par exemple, si vous utilisez:
C:\>YModule inventory
Vous obtenez un inventaire des modules connectés par USB, en utilisant un accès natif. Si il y a déjà une autre commande en cours qui accède aux modules en natif, cela ne fonctionnera pas. Mais si vous lancez un virtual hub et que vous lancez votre commande sous la forme:
C:\>YModule -r 127.0.0.1 inventory
cela marchera parce que la commande ne sera plus exécutée nativement, mais à travers le Virtual Hub. Notez que le Virtual Hub compte comme une application native.
7. Utilisation du Yocto-Color en JavaScript / EcmaScript
EcmaScript est le nom officiel de la version standardisée du langage de programmation communément appelé JavaScript. Cette librairie de programmation Yoctopuce utilise les nouvelles fonctionnalités introduites dans la version EcmaScript 2017. La librairie porte ainsi le nom Librairie pour JavaScript / EcmaScript 2017, afin de la différentier de la précédente Librairie pour JavaScript qu'elle remplace.
Cette librairie permet d'accéder aux modules Yoctopuce depuis tous les environnements JavaScript modernes. Elle fonctionne aussi bien depuis un navigateur internet que dans un environnement Node.js. La librairie détecte automatiquement à l'initialisation si le contexte d'utilisation est un browser ou une machine virtuelle Node.js, et utilise les librairies systèmes les plus appropriées en conséquence.
Les communications asynchrones avec les modules sont gérées dans toute la librairie à l'aide d'objets Promise, en utilisant la nouvelle syntaxe EcmaScript 2017 async / await non bloquante pour la gestion des entrées/sorties asynchrones (voir ci-dessous). Cette syntaxe est désormais disponible sans autres dans la plupart des moteurs JavaScript: il n'est plus nécessaire de transpiler le code avec Babel ou jspm. Voici la version minimum requise de vos moteurs JavaScript préférés, tous disponibles au téléchargement:
- Node.js v7.6 and later
- Firefox 52
- Opera 42 (incl. Android version)
- Chrome 55 (incl. Android version)
- Safari 10.1 (incl. iOS version)
- Android WebView 55
- Google V8 Javascript engine v5.5
Si vous avez besoin de la compatibilité avec des anciennes versions, vous pouvez toujours utiliser Babel pour transpiler votre code et la libriairie vers un standard antérieur de JavaScript, comme décrit un peu plus bas.
Nous ne recommendons plus l'utilisation de jspm 0.17 puisque cet outil est toujours en version Beta après 18 mois, et que solliciter l'utilisation d'un outil supplémentaire pour utiliser notre librairie ne se justifie plus dès lors que async / await sont standardisés.
7.1. Fonctions bloquantes et fonctions asynchrones en JavaScript
JavaScript a été conçu pour éviter toute situation de concurrence durant l'exécution. Il n'y a jamais qu'un seul thread en JavaScript. Cela signifie que si un programme effectue une attente active durant une communication réseau, par exemple pour lire un capteur, le programme entier se trouve bloqué. Dans un navigateur, cela peut se traduire par un blocage complet de l'interface utilisateur. C'est pourquoi l'utilisation de fonctions d'entrée/sortie bloquantes en JavaScript est sévèrement découragée de nos jours, et les API bloquantes se font toutes déclarer deprecated.
Plutôt que d'utiliser des threads parallèles, JavaScript utilise les opérations asynchrones pour gérer les attentes dans les entrées/sorties: lorsqu'une fonction potentiellement bloquante doit être appelée, l'opération est uniquement déclenchée mais le flot d'exécution est immédiatement terminé. La moteur JavaScript est alors libre pour exécuter d'autres tâches, comme la gestion de l'interface utilisateur par exemple. Lorsque l'opération bloquante se termine finalement, le système relance le code en appelant une fonction de callback, en passant en paramètre le résultat de l'opération, pour permettre de continuer la tâche originale.
Lorsqu'on les utilises avec des simples fonctions de callback, comme c'est fait quasi systématiquement dans les librairies Node.js, les opérations asynchrones ont la fâcheuse tendance de rentre le code illisible puisqu'elles découpent systématiquement le flot du code en petites fonctions de callback déconnectées les unes des autres. Heureusement, de nouvelles idées sont apparues récemment pour améliorer la situation. En particulier, l'utilisation d'objets Promise pour travailler avec les opérations asynchrones aide beaucoup. N'importe quelle fonction qui effectue une opération potentiellement longue peut retourner une promesse de se terminer, et cet objet Promise peut être utilisé par l'appelant pour chaîner d'autres opérations en un flot d'exécution. La classe Promise fait partie du standard EcmaScript 2015.
Les objets Promise sont utiles, mais ce qui les rend vraiment pratique est la nouvelle syntaxe async / await pour la gestion des appels asynchrones:
- une fonction déclarée async encapsule automatiquement son résultat dans une promesse
- dans une fonction async, tout appel préfixé par await a pour effet de chaîner automatiquement la promesses retournées par la fonction appelée à une promesse de continue l'exécution de l'appelant
- tout exception durant l'exécution d'une fonction async déclenche le flot de traitrment d'erreur de la promesse.
En clair, async et await permettent d'écrire du code EcmaScript avec tous les avantages des entrées/sorties asynchrones, mais sans interrompre le flot d'écriture du code. Cela revient quasiment à une exécution multi-tâche, mais en garantissant que le passage de contrôle d'une tâche à l'autre ne se produira que là où le mot-clé await apparaît.
Nous avons donc décidé d'écrire cette nouvelle librairie EcmaScript en utilisant les objets Promise et des fonctions async, pour vous permettre d'utiliser la notation await si pratique. Et pour ne pas devoir vous poser la question pour chaque méthode de savoir si elle est asynchrone ou pas, la convention est la suivante: toutes les méthodes publiques de la librairie EcmaScript sont async, c'est-à-dire qu'elles retournent un objet Promise, sauf:
- GetTickCount(), parce que mesurer le temps de manière asynchrone n'a pas beaucoup de sens...
- FindModule(), FirstModule(), nextModule(), ... parce que la détection et l'énumération des modules est faite en tâche de fond sur des structures internes qui sont gérées de manière transparente, et qu'il n'est donc pas nécessaire de faire des opérations bloquantes durant le simple parcours de ces listes de modules.
7.2. Utiliser la librairie Yoctopuce pour JavaScript / EcmaScript 2017
JavaScript fait partie de ces langages qui ne vous permettront pas d'accéder directement aux couches matérielles de votre ordinateur. C'est pourquoi si vous désirez travailler avec des modules USB branchés par USB, vous devrez faire tourner la passerelle de Yoctopuce appelée VirtualHub sur la machine à laquelle sont branchés les modules.
Connectez vous sur le site de Yoctopuce et téléchargez les éléments suivants:
- La librairie de programmation pour Javascript / EcmaScript 201717
- Le programme VirtualHub18 pour Windows, Mac OS X ou Linux selon l'OS que vous utilisez
Décompressez les fichiers de la librairie dans un répertoire de votre choix, branchez vos modules et lancez le programme VirtualHub. Vous n'avez pas besoin d'installer de driver.
Utiliser la librairie Yoctopuce officielle pour node.js
Commencez par installer sur votre machine de développement la version actuelle de Node.js (7.6 ou plus récente), C'est très simple. Vous pouvez l'obtenir sur le site officiel: http://nodejs.org. Assurez vous de l'installer entièrement, y compris npm, et de l'ajouter à votre system path.
Vous pouvez ensuite prendre l'exemple de votre choix dans le répertoire example_nodejs (par exemple example_nodejs/Doc-Inventory). Allez dans ce répertoire. Vous y trouverez un fichier décrivant l'application (package.json), un fichier de configuration pour jspm (jspm.config.js) et le code source de l'application (src/demo.js). Pour charger automatiquement et configurer les librairies nécessaires à l'exemple, tapez simplement:
npm install
Une fois que c'est fait, vous pouvez directement lancer le code de l'application:
node demo.js
Utiliser une copie locale de la librairie Yoctopuce avec node.js
Si pour une raison ou une autre vous devez faire des modifications au code de la librairie, vous pouvez facilement configurer votre projet pour utiliser le code source de la librairie qui se trouve dans le répertoire lib/ plutôt que le package npm officiel. Pour cela, lancez simplement la commande suivante dans le répertoire de votre projet:
npm link ../../lib
Utiliser la librairie Yoctopuce dans un navigateur (HTML)
Pour les exemples HTML, c'est encore plus simple: il n'y a rien à installer. Chaque exemple est un simple fichier HTML que vous pouvez ouvrir directement avec un navigateur pour l'essayer. L'inclusion de la librairie Yoctopuce ne demande rien de plus qu'un simple tag HTML <script>.
Utiliser la librairie Yoctopuce avec des anciennes version de JavaScript
Si vous avez besoin d'utiliser cette librairie avec des moteurs JavaScript plus anciens, vous pouvez utiliser Babel19 pour transpiler votre code et la librairie dans une version antérieure du langage. Pour installer Babel avec les réglages usuels, tapez:
npm instal -g babel-cli
npm instal babel-preset-env
Normalement vous demanderez à Babel de poser les fichiers transpilés dans un autre répertoire, nommé comopat par exemple. Pour ce faire, utilisez par exemple les commandes suivantes:
babel --presets env demo.js --out-dir compat/
babel --presets env ../../lib --out-dir compat/
Bien que ces outils de transpilation soient basés sur node.js, ils fonctionnent en réalité pour traduire n'importe quel type de fichier JavaScript, y compris du code destiné à fonctionner dans un navigateur. La seule chose qui ne peut pas être faite aussi facilement est la transpilation de sciptes codés en dure à l'intérieur même d'une page HTML. Il vous faudra donc sortir ce code dans un fichier .js externe si il utiliser la syntaxe EcmaScript 2017, afin de le transpiler séparément avec Babel.
Babel dipose de nombreuses fonctionnalités intéressantes, comme un mode de surveillance qui traduite automatiquement au vol vos fichiers dès qu'il détecte qu'un fichier source a changé. Consultez les détails dans la documentation de Babel.
Compatibilité avec l'ancienne librairie JavaScript
Cette nouvelle librairie n'est pas compatible avec l'ancienne librairie JavaScript, car il n'existe pas de possibilité d'implémenter l'ancienne API bloquante sur la base d'une API asynchrone. Toutefois, les noms des méthodes sont les mêmes, et l'ancien code source synchrone peut facilement être rendu asynchrone simplement en ajoutant le mot-clé await devant les appels de méthode. Remplacez par exemple:
beaconState = module.get_beacon();
par
beaconState = await module.get_beacon();
Mis à part quelques exceptions, la plupart des méthodes redondantes XXX_async ont été supprimées, car elles auraient introduit de la confusion sur la manière correcte de gérer les appels asynchrones. Si toutefois vous avez besoin d'appeler un callback explicitement, il est très facile de faire appeler une fonction de callback à la résolution d'une méthode async, en utilisant l'objet Promise retourné. Par exemple, vous pouvez réécrire:
module.get_beacon_async(callback, myContext);
par
module.get_beacon().then(function(res) { callback(myContext, module, res); });
Si vous portez une application vers la nouvelle librairie, vous pourriez être amené à désirer des méthodes synchrones similaires à l'ancienne librairie (sans objet Promise), quitte à ce qu'elles retournent la dernière valeur reçue du capteur telle que stockée en cache, puisqu'il n'est pas possible de faire des communications bloquantes. Pour cela, la nouvelle librairie introduit un nouveau type de classes appelés proxys synchrones. Un proxy synchrone est un objet qui reflète la dernière value connue d'un objet d'interface, mais peut être accédé à l'aide de fonctions synchrones habituelles. Par exemple, plutôt que d'utiliser:
async function logInfo(module)
{
console.log('Name: '+await module.get_logicalName());
console.log('Beacon: '+await module.get_beacon());
}
...
logInfo(myModule);
...
on peut utiliser:
function logInfoProxy(moduleSyncProxy)
{
console.log('Name: '+moduleProxy.get_logicalName());
console.log('Beacon: '+moduleProxy.get_beacon());
}
logInfoSync(await myModule.get_syncProxy());
Ce dernier appel asynchrone peut aussi être formulé comme:
myModule.get_syncProxy().then(logInfoProxy);
7.3. Contrôle de la fonction ColorLed
Il suffit de quelques lignes de code pour piloter un Yocto-Color. Voici le squelette d'un fragment de code JavaScript qui utilise la fonction ColorLed.
import { YAPI, YColorLed } from 'yoctolib-es';
// On récupère l'objet représentant le module, à travers le VirtualHub local
await YAPI.RegisterHub('127.0.0.1');
var colorled = YColorLed.FindColorLed("YRGBLED1-123456.colorLed1");
// Pour gérer le hot-plug, on vérifie que le module est là
if(await colorled.isOnline())
{
// Utiliser colorled.set_rgbColor()
[...]
}
Voyons maintenant en détail ce que font ces quelques lignes.
Import de YAPI et YColorLed
Ces deux imports permettent d'avoir accès aux fonctions permettant de gérer les modules Yoctopuce. YAPI doit toujours être inclus, YColorLed est nécessaire pour gérer les modules contenant une LED RGB, comme le Yocto-Color. D'autres classes peuvent être utiles dans d'autres cas, comme YModule qui vous permet de faire une énumération de n'importe quel type de module Yoctopuce.
YAPI.RegisterHub
La méthode RegisterHub permet d'indiquer sur quelle machine se trouvent les modules Yoctopuce, ou plus exactement la machine sur laquelle tourne le programme VirtualHub. Dans notre cas l'adresse 127.0.0.1:4444 indique la machine locale, en utilisant le port 4444 (le port standard utilisé par Yoctopuce). Vous pouvez parfaitement changer cette adresse, et mettre l'adresse d'une autre machine sur laquelle tournerait un autre VirtualHub, ou d'un YoctoHub. Si l'hôte n'est pas joignable, la fonction déclanche une exception.
YColorLed.FindColorLed
La méthode FindColorLed, permet de retrouver une LED RGB en fonction du numéro de série de son module hôte et de son nom de fonction. Mais vous pouvez tout aussi bien utiliser des noms logiques que vous auriez préalablement configurés. Imaginons un module Yocto-Color avec le numéros de série YRGBLED1-123456 que vous auriez appelé "MonModule" et dont vous auriez nommé la fonction colorLed1 "MaFonction", les cinq appels suivants seront strictement équivalents (pour autant que MaFonction ne soit définie qu'une fois, pour éviter toute ambiguïté):
colorled = YColorLed.FindColorLed("YRGBLED1-123456.colorLed1")
colorled = YColorLed.FindColorLed("YRGBLED1-123456.MaFonction")
colorled = YColorLed.FindColorLed("MonModule.colorLed1")
colorled = YColorLed.FindColorLed("MonModule.MaFonction")
colorled = YColorLed.FindColorLed("MaFonction")
YColorLed.FindColorLed renvoie un objet que vous pouvez ensuite utiliser à loisir pour contrôler la LED RGB.
isOnline
La méthode isOnline() de l'objet renvoyé par FindColorLed permet de savoir si le module correspondant est présent et en état de marche.
set_rgbColor
La méthode set_rgbColor() de l'objet renvoyé par YColorLed.FindColorLed permet de régler la couleur de la led correspondante. La Couleur est donnée en coordonnées RGB codées sous forme d'un entier.
rgbMove
Il existe une méthode alternative pour changer de couleur. La méthode rgbMove() de l'objet renvoyé par YColorLed.FindColorLed permet de lancer une transition entre la couleur courante et une autre couleur RGB donnée en paramètre. Cette fonction prend aussi en paramètre le temps accordé pour effecter la transition.
Les méthodes set_rgbColor() et rgbMove() existent aussi en version HSL. En guise d'exercice, vous pourriez modifier l'exemple ci'dessous pour utiliser le système HSL. Vous pourriez ainsi observer les différences de comportement. En HSL pour le rouge est codé 0xFFFF80, le vert est codé 0x55FF80 et du bleu est codé 0xA9FF80.
Un exemple concret
Ouvrez une fenêtre de commande (un terminal, un shell...) et allez dans le répertoire example_node/Doc-GettingStarted-Yocto-Color de la librairie Yoctopuce pour EcmaScript. Vous y trouverez dans le sous-répertoire src le code d'exemple ci-dessous, qui reprend les fonctions expliquées précédemment, mais cette fois utilisées avec le décorum nécessaire à en faire un petit programme d'exemple concret.
Si le Yocto-Color n'est pas branché sur la machine où fonctionne le navigateur internet, remplacez dans l'exemple l'adresse 127.0.0.1 par l'adresse IP de la machine où est branché le Yocto-Color et où vous avez lancé le VirtualHub.
async function startDemo(args)
{
await YAPI.LogUnhandledPromiseRejections();
await YAPI.DisableExceptions();
// Setup the API to use the VirtualHub on local machine
let errmsg = new YErrorMsg();
if(await YAPI.RegisterHub('127.0.0.1', errmsg) != YAPI.SUCCESS) {
console.log('Cannot contact VirtualHub on 127.0.0.1: '+errmsg.msg);
return;
}
// Select the relay to use
let target;
if(args[0] == "any") {
let anyLed = YColorLed.FirstColorLed();
if (anyLed == null) {
console.log("No module connected (check USB cable)\n");
process.exit(1);
}
let module = await anyLed.get_module();
target = await module.get_serialNumber();
} else {
target = args[0];
}
let led1 = YColorLed.FindColorLed(target+'.colorLed1');
let led2 = YColorLed.FindColorLed(target+'.colorLed2');
let color;
if (args[1] == "red")
color = 0xFF0000;
else if (args[1] == "green")
color = 0x00FF00;
else if (args[1] == "blue")
color = 0x0000FF;
else
color = parseInt(args[1],16);
if(await led1.isOnline()) {
// Change the color in two different ways
led1.set_rgbColor(color); // immediate switch
led2.rgbMove(color,1000); // smooth transition
} else {
console.log("Module not connected (check identification and USB cable)\n");
}
await YAPI.FreeAPI();
}
if(process.argv.length < 5) {
console.log("usage: jspm run src/demo.js <serial_number> [ color | rgb ]");
console.log(" jspm run src/demo.js <logical_name> [ color | rgb ]");
console.log(" jspm run src/demo.js any [ color | rgb ] (use any discovered device)");
console.log("Eg.");
console.log(" jspm run src/demo.js any FF1493 ");
console.log(" jspm run src/demo.js YRGBLED1-123456 red");
} else {
startDemo(process.argv.slice(process.argv.length - 2));
}
Comme décrit au début de ce chapitre, vous devez avoir installé Node.js et jspm pour essayer ces exemples. Si vous l'avez fait, vous pouvez maintenant taper les deux commandes suivantes pour télécharger automatiquement les librairies dont cet exemple dépend:
npm install
jspm install
jspm run src/demo.js [...]
Le même exemple, mais dans un navigateur
Si vous voulez voir comment utiliser la librairie dans un navigateur, changez de répertoire et allez dans example_html/Doc-GettingStarted-Yocto-Color. Vous y trouverez aussi dans le sous-répertoire src un code très similaire (ci-dessous), avec quelques variantes par rapport au précédent, pour permettre une interaction à travers une page HTML plutôt que sur la console JavaScript
var led1, led2;
async function startDemo()
{
await YAPI.LogUnhandledPromiseRejections();
await YAPI.DisableExceptions();
// Setup the API to use the VirtualHub on local machine
let errmsg = new YErrorMsg();
if(await YAPI.RegisterHub('127.0.0.1', errmsg) != YAPI.SUCCESS) {
alert('Cannot contact VirtualHub on 127.0.0.1: '+errmsg.msg);
}
refresh();
}
async function refresh()
{
let serial = document.getElementById('serial').value;
if(serial == '') {
// by default use any connected module suitable for the demo
let anyLed = YColorLed.FirstColorLed();
if(anyLed) {
let module = await anyLed.module();
serial = await module.get_serialNumber();
document.getElementById('serial').value = serial;
}
}
led1 = YColorLed.FindColorLed(serial+'.colorLed1');
led2 = YColorLed.FindColorLed(serial+'.colorLed2');
if(await led1.isOnline()) {
document.getElementById('msg').value = '';
} else {
document.getElementById('msg').value = 'Module not connected';
}
setTimeout(refresh, 500);
}
window.setColor = function(color)
{
// Change the color in two different ways
led1.set_rgbColor(color); // immediate switch
led2.rgbMove(color,1000); // smooth transition
};
startDemo();
Vous trouverez aussi à la racine de l'exemple un fichier demo.html qui contient les éléments d'interface HTML de l'application de démonstration:
<html>
<head>
<title>Hello World</title>
<script src='jspm_packages/system.js'></script>
<script src='jspm.browser.js'></script>
<script src='jspm.config.js'></script>
<script>
System.import('app/helloworld.js');
</script>
<!-- When going in production, you can generate a self-contained js file using
jspm build --minify src/demo.js demo-sfx.js
and replace the 6 lines above by just this one:
<script src='demo-sfx.js'></script>
-->
</head>
<body>
Module to use: <input id='serial'>
<input id='msg' style='color:red;border:none;' readonly><br>
<a href='javascript:setColor(0xFF0000);'>Red</a><br>
<a href='javascript:setColor(0x00FF00);'>Green</a><br>
<a href='javascript:setColor(0x0000FF);'>Blue</a>
</body>
</html>
Comme précédemment, les deux commandes suivantes vont charger et installer automatiquement les composants nécessaires pour l'exécution de cet exemple:
npm install
jspm install
Il ne vous reste plus qu'à publier ce répertoire sur un serveur Web pour pouvoir tester l'exemple à travers un navigateur. Pour que le loader retrouve ses fichiers, vous devrez simplement indiquer dans le paramètre baseURL du fichier jspm.browser.js le chemin qui permet d'atteindre le projet, depuis la racine du serveur web. Par exemple, si vous accédez à l'exemple à travers l'URL http://127.0.0.1/EcmaScript/example_html/Doc-GettingStarted-Yocto-Color/demo.html vous devrez mettre dans jspm.browser.js:
SystemJS.config({
baseURL: "/EcmaScript/example_html/Doc-GettingStarted-Yocto-Color/",
...
}
Si vous préfériez lancer l'exemple en ouvrant un fichier local plutôt qu'à travers un serveur web, ou simplement si vous préférez que votre exemple ne se charge pas sous forme de multiples modules JavaScript indépendants, vous pouvez builder votre projet avec la commande:
jspm build --minify src/demo.js demo-sfx.js
Ceci crée un unique fichier JavaScript nommé demo-sfx.js à la racine du projet d'exemple, que vous pouvez directement inclure dans le fichier HTML à la place des 6 lignes de script initiales:
Une fois buildé de cette façon, le projet être ouvert directement par un navigateur depuis le disque.
7.4. Contrôle de la partie module
Chaque module peut-être contrôlé d'une manière similaire, vous trouverez ci dessous un simple programme d'exemple affichant les principaux paramètres d'un module et permettant d'activer la balise de localisation.
async function startDemo(args)
{
await YAPI.LogUnhandledPromiseRejections();
// Setup the API to use the VirtualHub on local machine
let errmsg = new YErrorMsg();
if(await YAPI.RegisterHub('127.0.0.1', errmsg) != YAPI.SUCCESS) {
console.log('Cannot contact VirtualHub on 127.0.0.1: '+errmsg.msg);
return;
}
// Select the relay to use
let module = YModule.FindModule(args[0]);
if(await module.isOnline()) {
if(args.length > 1) {
if(args[1] == 'ON') {
await module.set_beacon(YModule.BEACON_ON);
} else {
await module.set_beacon(YModule.BEACON_OFF);
}
}
console.log('serial: '+await module.get_serialNumber());
console.log('logical name: '+await module.get_logicalName());
console.log('luminosity: '+await module.get_luminosity()+'%');
console.log('beacon: '+(await module.get_beacon()==YModule.BEACON_ON?'ON':'OFF'));
console.log('upTime: '+parseInt(await module.get_upTime()/1000)+' sec');
console.log('USB current: '+await module.get_usbCurrent()+' mA');
console.log('logs:');
console.log(await module.get_lastLogs());
} else {
console.log("Module not connected (check identification and USB cable)\n");
}
await YAPI.FreeAPI();
}
if(process.argv.length < 3) {
console.log("usage: jspm run src/demo.js <serial or logicalname> [ ON | OFF ]");
} else {
startDemo(process.argv.slice(process.argv.length - 3));
}
Chaque propriété xxx du module peut être lue grâce à une méthode du type get_xxxx(), et les propriétés qui se sont pas en lecture seule peuvent être modifiées à l'aide de la méthode set_xxx() Pour plus de détails concernant ces fonctions utilisées, reportez-vous aux chapitre API
Modifications des réglages du module
Lorsque que vous souhaitez modifier les réglages d'un module, il suffit d'appeler la fonction set_xxx() correspondante, cependant cette modification n'a lieu que dans la mémoire vive du module: si le module redémarre, les modifications seront perdues. Pour qu'elle soient mémorisées de manière persistante, il est nécessaire de demander au module de sauvegarder sa configuration courante dans sa mémoire non volatile. Pour cela il faut utiliser la méthode saveToFlash(). Inversement il est possible de forcer le module à oublier ses réglages courants en utilisant la méthode revertFromFlash(). Ce petit exemple ci-dessous vous permet changer le nom logique d'un module.
async function startDemo(args)
{
await YAPI.LogUnhandledPromiseRejections();
// Setup the API to use the VirtualHub on local machine
let errmsg = new YErrorMsg();
if(await YAPI.RegisterHub('127.0.0.1', errmsg) != YAPI.SUCCESS) {
console.log('Cannot contact VirtualHub on 127.0.0.1: '+errmsg.msg);
return;
}
// Select the relay to use
let module = YModule.FindModule(args[0]);
if(await module.isOnline()) {
if(args.length > 1) {
var newname = args[1];
if (!await YAPI.CheckLogicalName(newname)) {
console.log("Invalid name (" + newname + ")");
process.exit(1);
}
await module.set_logicalName(newname);
await module.saveToFlash();
}
console.log('Current name: '+await module.get_logicalName());
} else {
console.log("Module not connected (check identification and USB cable)\n");
}
await YAPI.FreeAPI();
}
if(process.argv.length < 3) {
console.log("usage: jspm run src/demo.js <serial> [newLogicalName]");
} else {
startDemo(process.argv.slice(process.argv.length - 3));
}
Attention, le nombre de cycle d'écriture de la mémoire non volatile du module est limité. Passé cette limite plus rien ne garantit de que la sauvegarde des réglages se passera correctement. Cette limite, liée à la technologie employé par le micro-processeur du module se situe aux alentour de 100000 cycles. Pour résumer vous ne pouvez employer la fonction saveToFlash() que 100000 fois au cours de la vie du module. Veillez donc à ne pas appeler cette fonction depuis l'intérieur d'une boucle.
Énumération des modules
Obtenir la liste des modules connectés se fait à l'aide de la fonction YModule.FirstModule() qui renvoie le premier module trouvé, il suffit ensuite d'appeler la fonction nextModule() de cet objet pour trouver les modules suivants, et ce tant que la réponse n'est pas un null. Ci-dessous un petit exemple listant les module connectés
async function startDemo()
{
await YAPI.LogUnhandledPromiseRejections();
await YAPI.DisableExceptions();
// Setup the API to use the VirtualHub on local machine
let errmsg = new YErrorMsg();
if (await YAPI.RegisterHub('127.0.0.1', errmsg) != YAPI.SUCCESS) {
console.log('Cannot contact VirtualHub on 127.0.0.1');
return;
}
refresh();
}
async function refresh()
{
try {
let errmsg = new YErrorMsg();
await YAPI.UpdateDeviceList(errmsg);
let module = YModule.FirstModule();
while(module) {
let line = await module.get_serialNumber();
line += '(' + (await module.get_productName()) + ')';
console.log(line);
module = module.nextModule();
}
setTimeout(refresh, 500);
} catch(e) {
console.log(e);
}
}
try {
startDemo();
} catch(e) {
console.log(e);
}
7.5. Gestion des erreurs
Lorsque vous implémentez un programme qui doit interagir avec des modules USB, vous ne pouvez pas faire abstraction de la gestion des erreurs. Il y aura forcément une occasion où un utilisateur aura débranché le périphérique, soit avant de lancer le programme, soit même en pleine opération. La librairie Yoctopuce est prévue pour vous aider à supporter ce genre de comportements, mais votre code doit néanmoins être fait pour se comporter au mieux pour interpréter les erreurs signalées par la librairie.
La manière la plus simple de contourner le problème est celle que nous avons employé pour les petits exemples précédents de ce chapitre: avant d'accéder à un module, on vérifie qu'il est en ligne avec la méthode isOnline() et on suppose ensuite qu'il va y rester pendant la fraction de seconde nécessaire à exécuter les lignes de code suivantes. Ce n'est pas parfait, mais ça peut suffire dans certains cas. Il faut toutefois être conscient qu'on ne peut pas totalement exclure une erreur se produisant après le isOnline(), qui pourrait faire planter le programme. La seule manière de l'éviter est d'implémenter une des deux techniques de gestion des erreurs décrites ci-dessous.
La méthode recommandée par la plupart des langages de programmation pour la gestion des erreurs imprévisibles est l'utilisation d'exceptions. C'est le comportement par défaut de la librairie Yoctopuce. Si une erreur se produit alors qu'on essaie d'accéder à un module, la librairie va lancer une exception. Dans ce cas, de trois choses l'une:
- Si votre code attrape l'exception au vol et la gère, et tout se passe bien.
- Si votre programme tourne dans le debugger, vous pourrez relativement facilement déterminer où le problème s'est produit, et voir le message explicatif lié à l'exception.
- Sinon... l'exception va crasher votre programme, boum!
Comme cette dernière situation n'est pas la plus souhaitable, la librairie Yoctopuce offre une autre alternative pour la gestion des erreurs, permettant de faire un programme robuste sans devoir attraper les exceptions à chaque ligne de code. Il suffit d'appeler la fonction YAPI.DisableExceptions() pour commuter la librairie dans un mode où les exceptions de chaque fonction sont systématiquement remplacées par des valeurs de retour particulières, qui peuvent être testées par l'appelant lorsque c'est pertinent. Le nom de la valeur de retour en cas d'erreur pour chaque fonction est systématiquement documenté dans la référence de la librairie. Il suit toujours la même logique: une méthode get_state() retournera une valeur Y_STATE_INVALID, une méthode get_currentValue retournera une valeur Y_CURRENTVALUE_INVALID, etc. Dans tous les cas, la valeur retournée sera du type attendu, et ne sera pas un pointeur nul qui risquerait de faire crasher votre programme. Au pire, si vous affichez la valeur sans la tester, elle sera hors du cadre attendu pour la valeur retournée. Dans le cas de fonctions qui ne retournent à priori pas d'information, la valeur de retour sera YAPI_SUCCESS si tout va bien, et un code d'erreur différent en cas d'échec.
Quand vous travaillez sans les exceptions, il est possible d'obtenir un code d'erreur et un message expliquant l'origine de l'erreur en le demandant à l'objet qui a retourné une erreur à l'aide des méthodes errType() et errMessage(). Ce sont les même informations qui auraient été associées à l'exception si elles avaient été actives.
8. Utilisation du Yocto-Color en PHP
PHP est, tout comme Javascript, un langage assez atypique lorsqu'il s'agit de discuter avec du hardware. Néanmoins, utiliser PHP avec des modules Yoctopuce offre l'opportunité de construire très facilement des sites web capables d'interagir avec leur environnement physique, ce qui n'est pas donné à tous les serveurs web. Cette technique trouve une application directe dans la domotique: quelques modules Yoctopuce, un serveur PHP et vous pourrez interagir avec votre maison depuis n'importe ou dans le monde. Pour autant que vous ayez une connexion internet.
PHP fait lui aussi partie de ces langages qui ne vous permettront pas d'accéder directement aux couches matérielles de votre ordinateur. C'est pourquoi vous devrez faire tourner un hub virtuel sur la machine à laquelle sont branchés les modules
Pour démarrer vos essais en PHP, vous allez avoir besoin d'un serveur PHP 5.3 ou plus 20 de préférence en local sur votre machine. Si vous souhaiter utiliser celui qui se trouve chez votre provider internet, c'est possible, mais vous devrez probablement configurer votre routeur ADSL pour qu'il accepte et forwarde les requêtes TCP sur le port 4444.
8.1. Préparation
Connectez vous sur le site de Yoctopuce et téléchargez les éléments suivants:
- La librairie de programmation pour PHP21
- Le programme VirtualHub22 pour Windows, Mac OS X ou Linux selon l'OS que vous utilisez
Décompressez les fichiers de la librairie dans un répertoire de votre choix accessible à votre serveur web, branchez vos modules, lancez le programme VirtualHub, et vous pouvez commencer vos premiers test. Vous n'avez pas besoin d'installer de driver.
8.2. Contrôle de la fonction ColorLed
Il suffit de quelques lignes de code pour piloter un Yocto-Color. Voici le squelette d'un fragment de code PHP qui utilise la fonction ColorLed.
include('yocto_api.php');
include('yocto_colorled.php');
// On récupère l'objet représentant le module, à travers le VirtualHub local
yRegisterHub('http://127.0.0.1:4444/',$errmsg);
$colorled = yFindColorLed("YRGBLED1-123456.colorLed1");
// Pour gérer le hot-plug, on vérifie que le module est là
if(colorled->isOnline())
{
// Utiliser colorled->set_rgbColor(), ...
}
Voyons maintenant en détail ce que font ces quelques lignes.
yocto_api.php et yocto_colorled.php
Ces deux includes PHP permettent d'avoir accès aux fonctions permettant de gérer les modules Yoctopuce. yocto_api.php doit toujours être inclus, yocto_colorled.php est nécessaire pour gérer les modules contenant une LED RGB, comme le Yocto-Color.
yRegisterHub
La fonction yRegisterHub permet d'indiquer sur quelle machine se trouve les modules Yoctopuce, ou plus exactemenent sur quelle machine tourne le programme VirtualHub. Dans notre cas l'adresse 127.0.0.1:4444 indique la machine locale, en utilisant le port 4444 (le port standard utilisé par Yoctopuce). Vous pouvez parfaitement changer cette adresse, et mettre l'adresse d'une autre machine sur laquelle tournerait un autre VirtualHub.
yFindColorLed
La fonction yFindColorLed, permet de retrouver une LED RGB en fonction du numéro de série de son module hôte et de son nom de fonction. Mais vous pouvez tout aussi bien utiliser des noms logiques que vous auriez préalablement configurés. Imaginons un module Yocto-Color avec le numéros de série YRGBLED1-123456 que vous auriez appelé "MonModule" et dont vous auriez nommé la fonction colorLed1 "MaFonction", les cinq appels suivants seront strictement équivalents (pour autant que MaFonction ne soit définie qu'une fois, pour éviter toute ambiguïté):
$colorled = yFindColorLed("YRGBLED1-123456.colorLed1");
$colorled = yFindColorLed("YRGBLED1-123456.MaFonction");
$colorled = yFindColorLed("MonModule.colorLed1");
$colorled = yFindColorLed("MonModule.MaFonction");
$colorled = yFindColorLed("MaFonction");
yFindColorLed renvoie un objet que vous pouvez ensuite utiliser à loisir pour contrôler la LED RGB.
isOnline
La méthode isOnline() de l'objet renvoyé par yFindColorLed permet de savoir si le module correspondant est présent et en état de marche.
set_rgbColor
La méthode set_rgbColor() de l'objet renvoyé par yFindColorLed permet de régler la couleur de la led correspondante. La Couleur est donnée en coordonnées RGB codées sous forme d'un entier.
rgbMove
Il existe une méthode alternative pour changer de couleur. La méthode rgbMove() de l'objet renvoyé par yFindColorLed permet de lancer une transition entre la couleur courante et une autre couleur RGB donnée en paramètre. Cette fonction prend aussi en paramètre le temps accordé pour effecter la transition.
Les méthodes set_rgbColor() et rgbMove() existent aussi en version HSL. En guise d'exercice, vous pourriez modifier l'exemple ci'dessous pour utiliser le système HSL. Vous pourriez ainsi observer les différences de comportement. En HSL pour le rouge est codé 0xFFFF80, le vert est codé 0x55FF80 et du bleu est codé 0xA9FF80.
Un exemple réel
Ouvrez votre éditeur de texte préféré23, recopiez le code ci dessous, sauvez-le dans un répertoire accessible par votre serveur web/PHP avec les fichiers de la librairie, et ouvrez-la page avec votre browser favori. Vous trouverez aussi ce code dans le répertoire Examples/Doc-GettingStarted-Yocto-Color de la librairie Yoctopuce.
Vous reconnaîtrez dans cet exemple l'utilisation des fonctions expliquées ci-dessus, cette fois utilisées avec le décorum nécessaire à en faire un petit programme d'exemple concret.
<HEAD>
<TITLE>Hello World</TITLE>
</HEAD>
<BODY>
<FORM method='get'>
<?php
include('yocto_api.php');
include('yocto_colorled.php');
// Use explicit error handling rather than exceptions
yDisableExceptions();
// Setup the API to use the VirtualHub on local machine
if(yRegisterHub('http://127.0.0.1:4444/',$errmsg) != YAPI_SUCCESS) {
die("Cannot contact VirtualHub on 127.0.0.1");
}
@$serial = $_GET['serial'];
if ($serial != '') {
// Check if a specified module is available online
$led1 = yFindColorLed("$serial.colorLed1");
$led2 = yFindColorLed("$serial.colorLed2");
if (!$led1->isOnline()) {
die("Module not connected (check serial and USB cable)");
}
} else {
// or use any connected module suitable for the demo
$led1 = yFirstColorLed();
if(is_null($led1)) {
die("No module connected (check USB cable)");
} else {
$led2 = $led1->nextColorLed();
$serial = $led1->module()->get_serialnumber();
}
}
Print("Module to use: <input name='serial' value='$serial'><br>");
// Drive the selected module
if (isset($_GET['color'])) {
// Change the color in two different ways
$color = hexdec($_GET['color']);
$led1->set_rgbColor($color); // immediate switch
$led2->rgbMove($color,1000); // smooth transition
}
yFreeAPI();
?>
<input type='radio' name='color' value='0xFF0000'>Red
<input type='radio' name='color' value='0x00FF00'>Green
<input type='radio' name='color' value='0x0000FF'>Blue
<br><input type='submit'>
</FORM>
</BODY>
</HTML>
8.3. Contrôle de la partie module
Chaque module peut-être contrôlé d'une manière similaire, vous trouverez ci dessous un simple programme d'exemple affichant les principaux paramètres d'un module et permettant d'activer la balise de localisation.
<HEAD>
<TITLE>Module Control</TITLE>
</HEAD>
<BODY>
<FORM method='get'>
<?php
include('yocto_api.php');
// Use explicit error handling rather than exceptions
yDisableExceptions();
// Setup the API to use the VirtualHub on local machine
if(yRegisterHub('http://127.0.0.1:4444/',$errmsg) != YAPI_SUCCESS) {
die("Cannot contact VirtualHub on 127.0.0.1 : ".$errmsg);
}
@$serial = $_GET['serial'];
if ($serial != '') {
// Check if a specified module is available online
$module = yFindModule("$serial");
if (!$module->isOnline()) {
die("Module not connected (check serial and USB cable)");
}
} else {
// or use any connected module suitable for the demo
$module = yFirstModule();
if($module) { // skip VirtualHub
$module = $module->nextModule();
}
if(is_null($module)) {
die("No module connected (check USB cable)");
} else {
$serial = $module->get_serialnumber();
}
}
Print("Module to use: <input name='serial' value='$serial'><br>");
if (isset($_GET['beacon'])) {
if ($_GET['beacon']=='ON')
$module->set_beacon(Y_BEACON_ON);
else
$module->set_beacon(Y_BEACON_OFF);
}
printf('serial: %s<br>',$module->get_serialNumber());
printf('logical name: %s<br>',$module->get_logicalName());
printf('luminosity: %s<br>',$module->get_luminosity());
print('beacon: ');
if($module->get_beacon() == Y_BEACON_ON) {
printf("<input type='radio' name='beacon' value='ON' checked>ON ");
printf("<input type='radio' name='beacon' value='OFF'>OFF<br>");
} else {
printf("<input type='radio' name='beacon' value='ON'>ON ");
printf("<input type='radio' name='beacon' value='OFF' checked>OFF<br>");
}
printf('upTime: %s sec<br>',intVal($module->get_upTime()/1000));
printf('USB current: %smA<br>',$module->get_usbCurrent());
printf('logs:<br><pre>%s</pre>',$module->get_lastLogs());
yFreeAPI();
?>
<input type='submit' value='refresh'>
</FORM>
</BODY>
</HTML>
Chaque propriété xxx du module peut être lue grâce à une méthode du type get_xxxx(), et les propriétés qui se sont pas en lecture seule peuvent être modifiées à l'aide de la méthode set_xxx() Pour plus de détails concernant ces fonctions utilisées, reportez-vous aux chapitre API
Modifications des réglages du module
Lorsque que vous souhaitez modifier les réglages d'un module, il suffit d'appeler la fonction set_xxx() correspondante, cependant cette modification n'a lieu que dans la mémoire vive du module: si le module redémarre, les modifications seront perdues. Pour qu'elle soient mémorisées de manière persistante, il est nécessaire de demander au module de sauvegarder sa configuration courante dans sa mémoire non volatile. Pour cela il faut utiliser la méthode saveToFlash(). Inversement il est possible de forcer le module à oublier ses réglages courants en utilisant la méthode revertFromFlash(). Ce petit exemple ci-dessous vous permet changer le nom logique d'un module.
<HEAD>
<TITLE>save settings</TITLE>
<BODY>
<FORM method='get'>
<?php
include('yocto_api.php');
// Use explicit error handling rather than exceptions
yDisableExceptions();
// Setup the API to use the VirtualHub on local machine
if(yRegisterHub('http://127.0.0.1:4444/',$errmsg) != YAPI_SUCCESS) {
die("Cannot contact VirtualHub on 127.0.0.1");
}
@$serial = $_GET['serial'];
if ($serial != '') {
// Check if a specified module is available online
$module = yFindModule("$serial");
if (!$module->isOnline()) {
die("Module not connected (check serial and USB cable)");
}
} else {
// or use any connected module suitable for the demo
$module = yFirstModule();
if($module) { // skip VirtualHub
$module = $module->nextModule();
}
if(is_null($module)) {
die("No module connected (check USB cable)");
} else {
$serial = $module->get_serialnumber();
}
}
Print("Module to use: <input name='serial' value='$serial'><br>");
if (isset($_GET['newname'])){
$newname = $_GET['newname'];
if (!yCheckLogicalName($newname))
die('Invalid name');
$module->set_logicalName($newname);
$module->saveToFlash();
}
printf("Current name: %s<br>", $module->get_logicalName());
print("New name: <input name='newname' value='' maxlength=19><br>");
yFreeAPI();
?>
<input type='submit'>
</FORM>
</BODY>
</HTML>
Attention, le nombre de cycle d'écriture de la mémoire non volatile du module est limité. Passé cette limite plus rien ne garantit de que la sauvegarde des réglages se passera correctement. Cette limite, lié à la technologie employé par le micro-processeur du module se situe aux alentour de 100000 cycles. Pour résumer vous ne pouvez employer la fonction saveToFlash() que 100000 fois au cours de la vie du module. Veillez donc à ne pas appeler cette fonction depuis l'intérieur d'une boucle.
Enumération des modules
Obtenir la liste des modules connectés se fait à l'aide de la fonction yFirstModule() qui renvoie le premier module trouvé, il suffit ensuite d'appeler la fonction nextModule() de cet objet pour trouver les modules suivants, et ce tant que la réponse n'est pas un NULL. Ci-dessous un petit exemple listant les module connectés
<HEAD>
<TITLE>inventory</TITLE>
</HEAD>
<BODY>
<H1>Device list</H1>
<TT>
<?php
include('yocto_api.php');
yRegisterHub("http://127.0.0.1:4444/");
$module = yFirstModule();
while (!is_null($module)) {
printf("%s (%s)<br>", $module->get_serialNumber(),
$module->get_productName());
$module=$module->nextModule();
}
yFreeAPI();
?>
</TT>
</BODY>
</HTML>
8.4. API par callback HTTP et filtres NAT
La librairie PHP est capable de fonctionner dans un mode spécial appelé Yocto-API par callback HTTP. Ce mode permet de contrôler des modules Yoctopuce installés derrière un filtre NAT tel qu'un routeur DSL par exemple, et ce sans avoir à un ouvrir un port. L'application typique est le contrôle de modules Yoctopuce situés sur réseau privé depuis un site Web publique.
Le filtre NAT, avantages et inconvénients
Un routeur DSL qui effectue de la traduction d'adresse réseau (NAT) fonctionne un peu comme un petit central téléphonique privé: les postes internes peuvent s'appeler l'un l'autre ainsi que faire des appels vers l'extérieur, mais vu de l'extérieur, il n'existe qu'un numéro de téléphone officiel, attribué au central téléphonique lui-même. Les postes internes ne sont pas atteignables depuis l'extérieur.
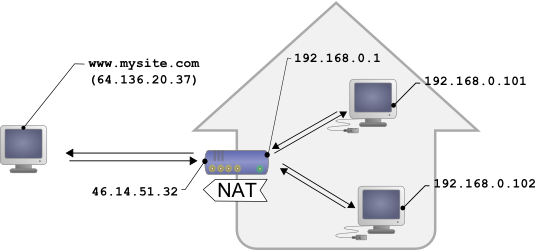
Configuration DSL typique, les machines du LAN sont isolées
de l'extérieur par le router DSL
Ce qui, transposé en terme de réseau, donne : les appareils connectés sur un réseau domestique peuvent communiquer entre eux en utilisant une adresse IP locale (du genre 192.168.xxx.yyy), et contacter des serveurs sur Internet par leur adresse publique, mais vu de l'extérieur, il n'y a qu'une seule adresse IP officielle, attribuée au routeur DSL exclusivement. Les différents appareils réseau ne sont pas directement atteignables depuis l'extérieur. C'est assez contraignant, mais c'est une protection relativement efficace contre les intrusions.

Les réponses aux requêtes venant des machines du LAN sont routées.
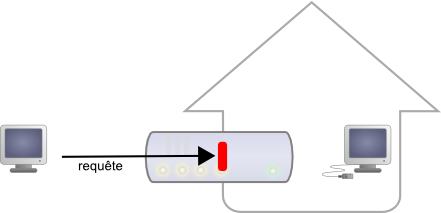
Mais les requêtes venant de l'extérieur sont bloquées.
Voir Internet sans être vu représente un avantage de sécurité énorme. Cependant, cela signifie qu'a priori, on ne peut pas simplement monter son propre serveur Web publique chez soi pour une installation domotique et offrir un accès depuis l'extérieur. Une solution à ce problème, préconisée par de nombreux vendeurs de domotique, consiste à donner une visibilité externe au serveur de domotique lui-même, en ouvrant un port et en ajoutant une règle de routage dans la configuration NAT du routeur DSL. Le problème de cette solution est qu'il expose le serveur de domotique aux attaques externes.
L'API par callback HTTP résoud ce problème sans qu'il soit nécessaire de modifier la configuration du routeur DSL. Le script de contrôle des modules est placé sur un site externe, et c'est le Virtual Hub qui est chargé de l'appeler à intervalle régulier.

L'API par callback HTTP utilise le VirtualHub, et c'est lui qui initie les requêtes.
Configuration
L'API callback se sert donc du Virtual Hub comme passerelle. Toutes les communications sont initiées par le Virtual Hub, ce sont donc des communication sortantes, et par conséquent parfaitement autorisée par le routeur DSL.
Il faut configurer le VirtualHub pour qu'il appelle le script PHP régulièrement. Pour cela il faut:
- Lancer un VirtualHub
- Accéder à son interface, généralement 127.0.0.1:4444
- Cliquer sur le bouton configure de la ligne correspondant au VirtualHub lui-même
- Cliquer sur le bouton edit de la section Outgoing callbacks
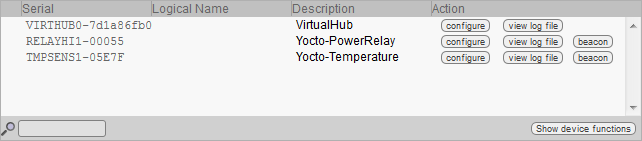
Cliquer sur le bouton "configure" de la première ligne
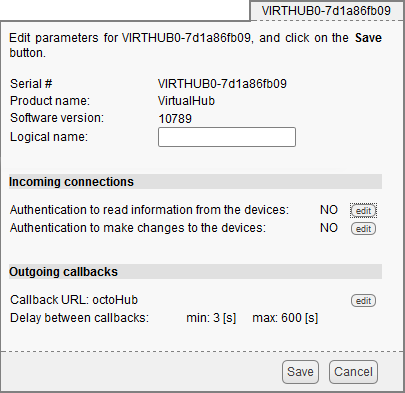
Cliquer sur le bouton "edit" de la section Outgoing callbacks.
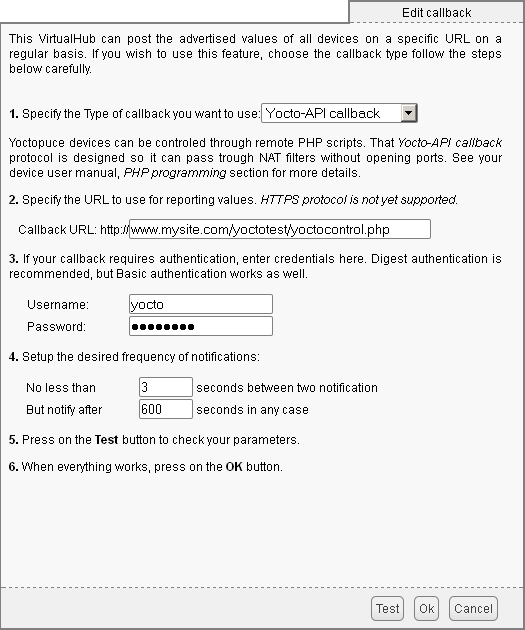
Et choisir "Yocto-API callback".
Il suffit alors de définir l'URL du script PHP et, si nécessaire, le nom d'utilisateur et le mot de passe pour accéder à cette URL. Les méthodes d'authentification supportées sont basic et digest. La seconde est plus sûre que la première car elle permet de ne pas transférer le mot de passe sur le réseau.
Utilisation
Du point de vue du programmeur, la seule différence se trouve au niveau de l'appel à la fonction yRegisterHub; au lieu d'utiliser une adresse IP, il faut utiliser la chaîne callback (ou http://callback, qui est équivalent).
include("yocto_api.php");
yRegisterHub("callback");
La suite du code reste strictement identique. Sur l'interface du VirtualHub, il y a en bas de la fenêtre de configuration de l'API par callback HTTP un bouton qui permet de tester l'appel au script PHP.
Il est à noter que le script PHP qui contrôle les modules à distance via l'API par callback HTTP ne peut être appelé que par le VirtualHub. En effet, il a besoin des informations postées par le VirtualHub pour fonctionner. Pour coder un site Web qui contrôle des modules Yoctopuce de manière interactive, il faudra créer une interface utilisateur qui stockera dans un fichier ou une base de données les actions à effectuer sur les modules Yoctopuce. Ces actions seront ensuite lues puis exécutés par le script de contrôle.
Problèmes courants
Pour que l'API par callback HTTP fonctionne, l'option de PHP allow_url_fopen
doit être activée. Certains hébergeurs de site web ne l'activent pas
par défaut. Le problème se manifeste alors avec l'erreur suivante:
error: URL file-access is disabled in the server configuration
Pour activer cette option, il suffit de créer dans le même répertoire
que le script PHP de contrôle un fichier .htaccess contenant
la ligne suivante:
php_flag "allow_url_fopen" "On"
Selon la politique de sécurité de l'hébergeur, il n'est parfois pas possible
d'autoriser cette option à la racine du site web, où même d'installer
des scripts PHP recevant des données par un POST HTTP. Dans
ce cas il suffit de placer le script PHP dans un sous-répertoire.
Limitations
Cette méthode de fonctionnement qui permet de passer les filtres NAT à moindre frais a malgré tout un prix. Les communications étant initiées par le Virtual Hub à intervalle plus ou moins régulier, le temps de réaction à un événement est nettement plus grand que si les modules Yoctopuce étaient pilotés en direct. Vous pouvez configurer le temps de réaction dans la fenêtre ad-hoc du Virtual Hub, mais il sera nécessairement de quelques secondes dans le meilleur des cas.
Le mode Yocto-API par callback HTTP n'est pour l'instant disponible qu'en PHP et Node.JS.
8.5. Gestion des erreurs
Lorsque vous implémentez un programme qui doit interagir avec des modules USB, vous ne pouvez pas faire abstraction de la gestion des erreurs. Il y aura forcément une occasion où un utilisateur aura débranché le périphérique, soit avant de lancer le programme, soit même en pleine opération. La librairie Yoctopuce est prévue pour vous aider à supporter ce genre de comportements, mais votre code doit néanmoins être fait pour se comporter au mieux pour interpréter les erreurs signalées par la librairie.
La manière la plus simple de contourner le problème est celle que nous avons employé pour les petits exemples précédents de ce chapitre: avant d'accéder à un module, on vérifie qu'il est en ligne avec la méthode isOnline() et on suppose ensuite qu'il va y rester pendant la fraction de seconde nécessaire à exécuter les lignes de code suivantes. Ce n'est pas parfait, mais ça peut suffire dans certains cas. Il faut toutefois être conscient qu'on ne peut pas totalement exclure une erreur se produisant après le isOnline(), qui pourrait faire planter le programme. La seule manière de l'éviter est d'implémenter une des deux techniques de gestion des erreurs décrites ci-dessous.
La méthode recommandée par la plupart des langages de programmation pour la gestion des erreurs imprévisibles est l'utilisation d'exceptions. C'est le comportement par défaut de la librairie Yoctopuce. Si une erreur se produit alors qu'on essaie d'accéder à un module, la librairie va lancer une exception. Dans ce cas, de trois choses l'une:
- Si votre code attrape l'exception au vol et la gère, et tout se passe bien.
- Si votre programme tourne dans le debugger, vous pourrez relativement facilement déterminer où le problème s'est produit, et voir le message explicatif lié à l'exception.
- Sinon... l'exception va crasher votre programme, boum!
Comme cette dernière situation n'est pas la plus souhaitable, la librairie Yoctopuce offre une autre alternative pour la gestion des erreurs, permettant de faire un programme robuste sans devoir attraper les exceptions à chaque ligne de code. Il suffit d'appeler la fonction YAPI.DisableExceptions() pour commuter la librairie dans un mode où les exceptions de chaque fonction sont systématiquement remplacées par des valeurs de retour particulières, qui peuvent être testées par l'appelant lorsque c'est pertinent. Le nom de la valeur de retour en cas d'erreur pour chaque fonction est systématiquement documenté dans la référence de la librairie. Il suit toujours la même logique: une méthode get_state() retournera une valeur Y_STATE_INVALID, une méthode get_currentValue retournera une valeur Y_CURRENTVALUE_INVALID, etc. Dans tous les cas, la valeur retournée sera du type attendu, et ne sera pas un pointeur nul qui risquerait de faire crasher votre programme. Au pire, si vous affichez la valeur sans la tester, elle sera hors du cadre attendu pour la valeur retournée. Dans le cas de fonctions qui ne retournent à priori pas d'information, la valeur de retour sera YAPI_SUCCESS si tout va bien, et un code d'erreur différent en cas d'échec.
Quand vous travaillez sans les exceptions, il est possible d'obtenir un code d'erreur et un message expliquant l'origine de l'erreur en le demandant à l'objet qui a retourné une erreur à l'aide des méthodes errType() et errMessage(). Ce sont les même informations qui auraient été associées à l'exception si elles avaient été actives.
9. Utilisation du Yocto-Color en C++
Le C++ n'est pas le langage le plus simple à maîtriser. Pourtant, si on prend soin à se limiter aux fonctionnalités essentielles, c'est un langage tout à fait utilisable pour des petits programmes vite faits, et qui a l'avantage d'être très portable d'un système d'exploitation à l'autre. Sous Windows, tous les exemples et les modèles de projet sont testés avec Microsoft Visual Studio 2010 Express, disponible gratuitement sur le site de Microsoft 24. Sous Mac OS X, tous les exemples et les modèles de projet sont testés avec XCode 4, disponible sur l'App Store. Par ailleurs, aussi bien sous Mac OS X que sous Linux, vous pouvez compiler les exemples en ligne de commande avec GCC en utilisant le GNUmakefile fourni. De même, sous Windows, un Makefile pour permet de compiler les exemples en ligne de commande, et en pleine connaissance des arguments de compilation et link.
Les librairies Yoctopuce25 pour C++ vous sont fournies au format source dans leur intégralité. Une partie de la librairie de bas-niveau est écrite en C pur sucre, mais vous n'aurez à priori pas besoin d'interagir directement avec elle: tout a été fait pour que l'interaction soit le plus simple possible depuis le C++. La librairie vous est fournie bien entendu aussi sous forme binaire, de sorte à pouvoir la linker directement si vous le préférez.
Vous allez rapidement vous rendre compte que l'API C++ defini beaucoup de fonctions qui retournent des objets. Vous ne devez jamais désallouer ces objets vous-même. Ils seront désalloués automatiquement par l'API à la fin de l'application.
Afin des les garder simples, tous les exemples fournis dans cette documentation sont des applications consoles. Il va de soit que que les fonctionnement des librairies est strictement identiques si vous les intégrez dans une application dotée d'une interface graphique. Vous trouverez dans la dernière section de ce chapitre toutes les informations nécessaires à la création d'un projet à neuf linké avec les librairies Yoctopuce.
9.1. Contrôle de la fonction ColorLed
Il suffit de quelques lignes de code pour piloter un Yocto-Color. Voici le squelette d'un fragment de code C++ qui utilise la fonction ColorLed.
#include "yocto_api.h"
#include "yocto_colorled.h"
[...]
String errmsg;
YColorLed *colorled;
// On récupère l'objet représentant le module (ici connecté en local sur USB)
yRegisterHub("usb", errmsg);
colorled = yFindColorLed("YRGBLED1-123456.colorLed1");
// Pour gérer le hot-plug, on vérifie que le module est là
if(colorled->isOnline())
{
// Utiliser colorled->set_rgbColor(), ...
}
Voyons maintenant en détail ce que font ces quelques lignes.
yocto_api.h et yocto_colorled.h
Ces deux fichiers inclus permettent d'avoir accès aux fonctions permettant de gérer les modules Yoctopuce. yocto_api.h doit toujours être utilisé, yocto_colorled.h est nécessaire pour gérer les modules contenant une LED RGB, comme le Yocto-Color.
yRegisterHub
La fonction yRegisterHub initialise l'API de Yoctopuce en indiquant où les modules doivent être recherchés. Utilisée avec le paramètre "usb", elle permet de travailler avec les modules connectés localement à la machine. Si l'initialisation se passe mal, cette fonction renverra une valeur différente de YAPI_SUCCESS, et retournera via le paramètre errmsg un explication du problème.
yFindColorLed
La fonction yFindColorLed, permet de retrouver une LED RGB en fonction du numéro de série de son module hôte et de son nom de fonction. Mais vous pouvez tout aussi bien utiliser des noms logiques que vous auriez préalablement configurés. Imaginons un module Yocto-Color avec le numéros de série YRGBLED1-123456 que vous auriez appelé "MonModule" et dont vous auriez nommé la fonction colorLed1 "MaFonction", les cinq appels suivants seront strictement équivalents (pour autant que MaFonction ne soit définie qu'une fois, pour éviter toute ambiguïté):
YColorLed *colorled = yFindColorLed("YRGBLED1-123456.colorLed1");
YColorLed *colorled = yFindColorLed("YRGBLED1-123456.MaFonction");
YColorLed *colorled = yFindColorLed("MonModule.colorLed1");
YColorLed *colorled = yFindColorLed("MonModule.MaFonction");
YColorLed *colorled = yFindColorLed("MaFonction");
yFindColorLed renvoie un objet que vous pouvez ensuite utiliser à loisir pour contrôler la LED RGB.
isOnline
La méthode isOnline() de l'objet renvoyé par yFindColorLed permet de savoir si le module correspondant est présent et en état de marche.
set_rgbColor
La méthode set_rgbColor() de l'objet renvoyé par yFindColorLed permet de régler la couleur de la led correspondante. La Couleur est donnée en coordonnées RGB codées sous forme d'un entier.
rgbMove
Il existe une méthode alternative pour changer de couleur. La méthode rgbMove() de l'objet renvoyé par yFindColorLed permet de lancer une transition entre la couleur courante et une autre couleur RGB donnée en paramètre. Cette fonction prend aussi en paramètre le temps accordé pour effecter la transition.
Les méthodes set_rgbColor() et rgbMove() existent aussi en version HSL. En guise d'exercice, vous pourriez modifier l'exemple ci'dessous pour utiliser le système HSL. Vous pourriez ainsi observer les différences de comportement. En HSL pour le rouge est codé 0xFFFF80, le vert est codé 0x55FF80 et du bleu est codé 0xA9FF80.
Un exemple réel
Lancez votre environnement C++ et ouvrez le projet exemple correspondant, fourni dans le répertoire Examples/Doc-GettingStarted-Yocto-Color de la librairie Yoctopuce. Si vous préférez travailler avec votre éditeur de texte préféré, ouvrez le fichier main.cpp, vous taperez simplement make dans le répertoire de l'exemple pour le compiler.
Vous reconnaîtrez dans cet exemple l'utilisation des fonctions expliquées ci-dessus, cette fois utilisées avec le décorum nécessaire à en faire un petit programme d'exemple concret.
#include "yocto_colorled.h"
#include <iostream>
#include <stdio.h>
#include <stdlib.h>
using namespace std;
static void usage(void)
{
cout << "usage: demo <serial_number> [ color | rgb ]" << endl;
cout << " demo <logical_name> [ color | rgb ]" << endl;
cout << " demo any [ color | rgb ] (use any discovered device)" <<
endl;
cout << "Eg." << endl;
cout << " demo any FF1493 " << endl;
cout << " demo YRGBLED1-123456 red" << endl;
u64 now = yGetTickCount();
while (yGetTickCount() - now < 3000) {
// wait 3 sec to show the message
}
exit(1);
}
int main(int argc, const char * argv[])
{
string errmsg;
string target;
YColorLed *led1;
YColorLed *led2;
string color_str;
unsigned int color;
if(argc < 3) {
usage();
}
target = (string) argv[1];
color_str = (string) argv[2];
if (color_str == "red")
color = 0xFF0000;
else if ( color_str == "green")
color = 0x00FF00;
else if (color_str == "blue")
color = 0x0000FF;
else
color = (unsigned int)strtoul(color_str.c_str(), NULL, 16);
// Setup the API to use local USB devices
if (yRegisterHub("usb", errmsg) != YAPI_SUCCESS) {
cerr << "RegisterHub error: " << errmsg << endl;
return 1;
}
if (target == "any") {
led1 = yFirstColorLed();
if (led1 == NULL) {
cout << "No module connected (check USB cable)" << endl;
return 1;
}
led2 = led1->nextColorLed();
} else {
led1 = yFindColorLed(target + ".colorLed1");
led2 = yFindColorLed(target + ".colorLed2");
}
if (led1->isOnline()) {
led1->set_rgbColor(color); // immediate switch
led2->rgbMove(color, 1000); // smooth transition
} else {
cout << "Module not connected (check identification and USB cable)" << endl;
}
yFreeAPI();
return 0;
}
9.2. Contrôle de la partie module
Chaque module peut-être contrôlé d'une manière similaire, vous trouverez ci dessous un simple programme d'exemple affichant les principaux paramètres d'un module et permettant d'activer la balise de localisation.
#include <stdlib.h>
#include "yocto_api.h"
using namespace std;
static void usage(const char *exe)
{
cout << "usage: " << exe << " <serial or logical name> [ON/OFF]" << endl;
exit(1);
}
int main(int argc, const char * argv[])
{
string errmsg;
// Setup the API to use local USB devices
if(yRegisterHub("usb", errmsg) != YAPI_SUCCESS) {
cerr << "RegisterHub error: " << errmsg << endl;
return 1;
}
if(argc < 2)
usage(argv[0]);
YModule *module = yFindModule(argv[1]); // use serial or logical name
if (module->isOnline()) {
if (argc > 2) {
if (string(argv[2]) == "ON")
module->set_beacon(Y_BEACON_ON);
else
module->set_beacon(Y_BEACON_OFF);
}
cout << "serial: " << module->get_serialNumber() << endl;
cout << "logical name: " << module->get_logicalName() << endl;
cout << "luminosity: " << module->get_luminosity() << endl;
cout << "beacon: ";
if (module->get_beacon() == Y_BEACON_ON)
cout << "ON" << endl;
else
cout << "OFF" << endl;
cout << "upTime: " << module->get_upTime() / 1000 << " sec" << endl;
cout << "USB current: " << module->get_usbCurrent() << " mA" << endl;
cout << "Logs:" << endl << module->get_lastLogs() << endl;
} else {
cout << argv[1] << " not connected (check identification and USB cable)"
<< endl;
}
yFreeAPI();
return 0;
}
Chaque propriété xxx du module peut être lue grâce à une méthode du type get_xxxx(), et les propriétés qui se sont pas en lecture seule peuvent être modifiées à l'aide de la méthode set_xxx() Pour plus de détails concernant ces fonctions utilisées, reportez-vous aux chapitre API
Modifications des réglages du module
Lorsque que vous souhaitez modifier les réglages d'un module, il suffit d'appeler la fonction set_xxx() correspondante, cependant cette modification n'a lieu que dans la mémoire vive du module: si le module redémarre, les modifications seront perdues. Pour qu'elle soient mémorisées de manière persistante, il est nécessaire de demander au module de sauvegarder sa configuration courante dans sa mémoire non volatile. Pour cela il faut utiliser la méthode saveToFlash(). Inversement il est possible de forcer le module à oublier ses réglages courants en utilisant la méthode revertFromFlash(). Ce petit exemple ci-dessous vous permet changer le nom logique d'un module.
#include <stdlib.h>
#include "yocto_api.h"
using namespace std;
static void usage(const char *exe)
{
cerr << "usage: " << exe << " <serial> <newLogicalName>" << endl;
exit(1);
}
int main(int argc, const char * argv[])
{
string errmsg;
// Setup the API to use local USB devices
if(yRegisterHub("usb", errmsg) != YAPI_SUCCESS) {
cerr << "RegisterHub error: " << errmsg << endl;
return 1;
}
if(argc < 2)
usage(argv[0]);
YModule *module = yFindModule(argv[1]); // use serial or logical name
if (module->isOnline()) {
if (argc >= 3) {
string newname = argv[2];
if (!yCheckLogicalName(newname)) {
cerr << "Invalid name (" << newname << ")" << endl;
usage(argv[0]);
}
module->set_logicalName(newname);
module->saveToFlash();
}
cout << "Current name: " << module->get_logicalName() << endl;
} else {
cout << argv[1] << " not connected (check identification and USB cable)"
<< endl;
}
yFreeAPI();
return 0;
}
Attention, le nombre de cycles d'écriture de la mémoire non volatile du module est limité. Passé cette limite plus rien ne garantit que la sauvegarde des réglages se passera correctement. Cette limite, liée à la technologie employée par le micro-processeur du module se situe aux alentour de 100000 cycles. Pour résumer vous ne pouvez employer la fonction saveToFlash() que 100000 fois au cours de la vie du module. Veillez donc à ne pas appeler cette fonction depuis l'intérieur d'une boucle.
Enumeration des modules
Obtenir la liste des modules connectés se fait à l'aide de la fonction yFirstModule() qui renvoie le premier module trouvé, il suffit ensuite d'appeler la fonction nextModule() de cet objet pour trouver les modules suivants, et ce tant que la réponse n'est pas un NULL. Ci-dessous un petit exemple listant les module connectés
#include "yocto_api.h"
using namespace std;
int main(int argc, const char * argv[])
{
string errmsg;
// Setup the API to use local USB devices
if(YAPI::RegisterHub("usb", errmsg) != YAPI_SUCCESS) {
cerr << "RegisterHub error: " << errmsg << endl;
return 1;
}
cout << "Device list: " << endl;
YModule *module = YModule::FirstModule();
while (module != NULL) {
cout << module->get_serialNumber() << " ";
cout << module->get_productName() << endl;
module = module->nextModule();
}
yFreeAPI();
return 0;
}
9.3. Gestion des erreurs
Lorsque vous implémentez un programme qui doit interagir avec des modules USB, vous ne pouvez pas faire abstraction de la gestion des erreurs. Il y aura forcément une occasion où un utilisateur aura débranché le périphérique, soit avant de lancer le programme, soit même en pleine opération. La librairie Yoctopuce est prévue pour vous aider à supporter ce genre de comportements, mais votre code doit néanmoins être fait pour se comporter au mieux pour interpréter les erreurs signalées par la librairie.
La manière la plus simple de contourner le problème est celle que nous avons employé pour les petits exemples précédents de ce chapitre: avant d'accéder à un module, on vérifie qu'il est en ligne avec la méthode isOnline() et on suppose ensuite qu'il va y rester pendant la fraction de seconde nécessaire à exécuter les lignes de code suivantes. Ce n'est pas parfait, mais ça peut suffire dans certains cas. Il faut toutefois être conscient qu'on ne peut pas totalement exclure une erreur se produisant après le isOnline(), qui pourrait faire planter le programme. La seule manière de l'éviter est d'implémenter une des deux techniques de gestion des erreurs décrites ci-dessous.
La méthode recommandée par la plupart des langages de programmation pour la gestion des erreurs imprévisibles est l'utilisation d'exceptions. C'est le comportement par défaut de la librairie Yoctopuce. Si une erreur se produit alors qu'on essaie d'accéder à un module, la librairie va lancer une exception. Dans ce cas, de trois choses l'une:
- Si votre code attrape l'exception au vol et la gère, et tout se passe bien.
- Si votre programme tourne dans le debugger, vous pourrez relativement facilement déterminer où le problème s'est produit, et voir le message explicatif lié à l'exception.
- Sinon... l'exception va crasher votre programme, boum!
Comme cette dernière situation n'est pas la plus souhaitable, la librairie Yoctopuce offre une autre alternative pour la gestion des erreurs, permettant de faire un programme robuste sans devoir attraper les exceptions à chaque ligne de code. Il suffit d'appeler la fonction YAPI.DisableExceptions() pour commuter la librairie dans un mode où les exceptions de chaque fonction sont systématiquement remplacées par des valeurs de retour particulières, qui peuvent être testées par l'appelant lorsque c'est pertinent. Le nom de la valeur de retour en cas d'erreur pour chaque fonction est systématiquement documenté dans la référence de la librairie. Il suit toujours la même logique: une méthode get_state() retournera une valeur Y_STATE_INVALID, une méthode get_currentValue retournera une valeur Y_CURRENTVALUE_INVALID, etc. Dans tous les cas, la valeur retournée sera du type attendu, et ne sera pas un pointeur nul qui risquerait de faire crasher votre programme. Au pire, si vous affichez la valeur sans la tester, elle sera hors du cadre attendu pour la valeur retournée. Dans le cas de fonctions qui ne retournent à priori pas d'information, la valeur de retour sera YAPI_SUCCESS si tout va bien, et un code d'erreur différent en cas d'échec.
Quand vous travaillez sans les exceptions, il est possible d'obtenir un code d'erreur et un message expliquant l'origine de l'erreur en le demandant à l'objet qui a retourné une erreur à l'aide des méthodes errType() et errMessage(). Ce sont les même informations qui auraient été associées à l'exception si elles avaient été actives.
9.4. Intégration de la librairie Yoctopuce en C++
Selon vos besoins et vos préférences, vous pouvez être mené à intégrer de différentes manières la librairie à vos projets. Cette section explique comment implémenter les différentes options.
Intégration au format source
L'intégration de toutes les sources de la librairie dans vos projets a plusieurs avantages:
- Elle garanti le respect des conventions de compilation de votre projet (32/64 bits, inclusion des symboles de debug, caractères unicode ou ASCII, etc.);
- Elle facilite le déboggage si vous cherchez la cause d'un problème lié à la librairie Yoctopuce
- Elle réduit les dépendances sur des composants tiers, par exemple pour parer au cas où vous pourriez être mené à recompiler ce projet pour une architecture différente dans de nombreuses années.
- Elle ne requiert pas l'installation d'une librairie dynamique spécifique à Yoctopuce sur le système final, tout est dans l'exécutable.
Pour intégrer le code source, le plus simple est d'inclure simplement le répertoire Sources de la librairie Yoctopuce à votre IncludePath, et d'ajouter tous les fichiers de ce répertoire (y compris le sous-répertoire yapi) à votre projet.
Pour que votre projet se construise ensuite correctement, il faudra linker avec votre projet les librairies systèmes requises, à savoir:
- Pour Windows: les librairies sont mises automatiquement
- Pour Mac OS X: IOKit.framework et CoreFoundation.framework
- Pour Linux: libm, libpthread, libusb1.0 et libstdc++
Intégration en librairie statique
L'intégration de de la librairie Yoctopuce sous forme de librairie statique est une manière plus simple de construire un petit exécutable utilisant des modules Yoctopuce. Elle permet une compilation rapide du programme en une seule commande. Elle ne requiert pas non plus l'installation d'une librairie dynamique spécifique à Yoctopuce sur le système final, tout est dans l'exécutable.
Pour intégrer la librairie statique Yoctopuce à votre projet, vous devez inclure le répertoire Sources de la librairie Yoctopuce à votre IncludePath, et ajouter le sous-répertoire de Binaries/... correspondant à votre système d'exploitation à votre LibPath.
Ensuite, pour que votre projet se construise ensuite correctement, il faudra linker avec votre projet la librairie Yoctopuce et les librairies systèmes requises:
- Pour Windows: yocto-static.lib
- Pour Mac OS X: libyocto-static.a. IOKit.framework et CoreFoundation.framework
- Pour Linux: libyocto-static.a, libm, libpthread, libusb1.0 et libstdc++.
Attention, sous Linux, si vous voulez compiler en ligne de commande avec GCC, il est en général souhaitable de linker les librairies systèmes en dynamique et non en statique. Pour mélanger sur la même ligne de commande des librairies statiques et dynamiques, il faut passer les arguments suivants:
gcc (...) -Wl,-Bstatic -lyocto-static -Wl,-Bdynamic -lm -lpthread -lusb-1.0 -lstdc++
Intégration en librairie dynamique
L'intégration de la librairie Yoctopuce sous forme de librairie dynamique permet de produire un exécutable plus petit que les deux méthodes précédentes, et de mettre éventuellement à jour cette librairie si un correctif s'avérait nécessaire sans devoir recompiler le code source de l'application. Par contre, c'est un mode d'intégration qui exigera systématiquement de copier la librairie dynamique sur la machine cible ou l'application devra être lancée (yocto.dll sous Windows, libyocto.so.1.0.1 sous Mac OS X et Linux).
Pour intégrer la librairie dynamique Yoctopuce à votre projet, vous devez inclure le répertoire Sources de la librairie Yoctopuce à votre IncludePath, et ajouter le sous-répertoire de Binaries/... correspondant à votre système d'exploitation à votre LibPath.
Ensuite, pour que votre projet se construise ensuite correctement, il faudra linker avec votre projet la librairie dynamique Yoctopuce et les librairies systèmes requises:
- Pour Windows: yocto.lib
- Pour Mac OS X: libyocto, IOKit.framework et CoreFoundation.framework
- Pour Linux: libyocto, libm, libpthread, libusb1.0 et libstdc++.
Avec GCC, la ligne de commande de compilation est simplement:
gcc (...) -lyocto -lm -lpthread -lusb-1.0 -lstdc++
10. Utilisation du Yocto-Color en Objective-C
Objective-C est le langage de prédilection pour programmer sous Mac OS X, en raison de son intégration avec le générateur d'interfaces Cocoa. Pour pouvoir utiliser la libraire Objective-C vous aurez impérativement besoin de XCode 4.2, qui est disponible gratuitement sous Lion. Si vous êtes encore sous Snow Leopard il vous faudra être enregistré comme développeur auprès d'Apple pour pourvoir télécharger XCode 4.2. La librairie Yoctopuce est compatible ARC. Il vous sera donc possible de coder vos projet soit en utilisant la traditionnelle méthode de retain / release, soit en activant l'Automatic Reference Counting.
Les librairies Yoctopuce26 pour Objective-C vous sont fournies au format source dans leur intégralité. Une partie de la librairie de bas-niveau est écrite en C pur sucre, mais vous n'aurez à priori pas besoin d'interagir directement avec elle: tout a été fait pour que l'interaction soit le plus simple possible depuis Objective-C.
Vous allez rapidement vous rendre compte que l'API Objective-C définit beaucoup de fonctions qui retournent des objets. Vous ne devez jamais désallouer ces objets vous-même. Ils seront désalloués automatiquement par l'API à la fin de l'application.
Afin des les garder simples, tous les exemples fournis dans cette documentation sont des applications consoles. Il va de soit que que les fonctionnement des librairies est strictement identiques si vous les intégrez dans une application dotée d'une interface graphique. Vous trouverez sur le blog de Yoctopuce un exemple détaillé27 avec des séquences vidéo montrant comment intégrer les fichiers de la librairie à vos projets.
10.1. Contrôle de la fonction ColorLed
Lancez Xcode 4.2 et ouvrez le projet exemple correspondant, fourni dans le répertoire Examples/Doc-GettingStarted-Yocto-Color de la librairie Yoctopuce.
#import "yocto_api.h"
#import "yocto_colorled.h"
static void usage(void)
{
NSLog(@"usage: demo <serial_number> [ color | rgb ]");
NSLog(@" demo <logical_name> [ color | rgb ]");
NSLog(@" demo any [ color | rgb ] (use any discovered device)");
NSLog(@"Eg.");
NSLog(@" demo any FF1493 ");
NSLog(@" demo YRGBLED1-123456 red");
exit(1);
}
int main(int argc, const char * argv[])
{
NSError * error;
if(argc < 3) {
usage();
}
@autoreleasepool {
// Setup the API to use local USB devices
if([YAPI RegisterHub:@"usb": &error] != YAPI_SUCCESS) {
NSLog(@"RegisterHub error: %@", [error localizedDescription]);
return 1;
}
NSString *target = [NSString stringWithUTF8String:argv[1]];
NSString *color_str = [NSString stringWithUTF8String:argv[2]];
if ([target isEqualToString:@"any"]) {
YColorLed *colorLed = [YColorLed FirstColorLed];
if (colorLed == NULL) {
NSLog(@"No Yocto-Color connected (check USB cable)");
return 1;
}
target = [[colorLed module] serialNumber];
}
YColorLed *led1 = [YColorLed FindColorLed:[target stringByAppendingString:
@".colorLed1"]];
YColorLed *led2 = [YColorLed FindColorLed:[target stringByAppendingString:
@".colorLed2"]];
unsigned color;
if ([color_str isEqualToString:@"red"])
color = 0xFF0000;
else if ([color_str isEqualToString:@"green"])
color = 0x00FF00;
else if ([color_str isEqualToString:@"blue"])
color = 0x0000FF;
else
color = (int)strtoul([color_str UTF8String], NULL, 16);
if ([led1 isOnline]) {
[led1 set_rgbColor:color]; // immediate switch
[led2 rgbMove:color:1000]; // smooth transition
} else {
NSLog(@"Module not connected (check identification and USB cable)\n");
}
[YAPI FreeAPI];
}
return 0;
}
Il n'y a que peu de lignes véritablement importantes dans le code précédent. Nous allons les expliquer en détail.
yocto_api.h et yocto_colorled.h
Ces deux fichiers importés permettent d'avoir accès aux fonctions permettant de gérer les modules Yoctopuce. yocto_api.h doit toujours être utilisé, yocto_colorled.h est nécessaire pour gérer les modules contenant une LED RGB, comme le Yocto-Color.
[YAPI RegisterHub]
La fonction [YAPI RegisterHub] initialise l'API de Yoctopuce en indiquant où les modules doivent être recherchés. Utilisée avec le paramètre @"usb", elle permet de travailler avec les modules connectés localement à la machine. Si l'initialisation se passe mal, cette fonction renverra une valeur différente de YAPI_SUCCESS, et retournera via le paramètre errmsg un explication du problème.
[ColorLed FindColorLed]
La fonction [ColorLed FindColorLed], permet de retrouver une LED RGB en fonction du numéro de série de son module hôte et de son nom de fonction. Mais vous pouvez tout aussi bien utiliser des noms logiques que vous auriez préalablement configurés. Imaginons un module Yocto-Color avec le numéros de série YRGBLED1-123456 que vous auriez appelé "MonModule" et dont vous auriez nommé la fonction colorLed1 "MaFonction", les cinq appels suivants seront strictement équivalents (pour autant que MaFonction ne soit définie qu'une fois, pour éviter toute ambiguïté):
YColorLed *colorled = [YColorLed FindColorLed:@"YRGBLED1-123456.colorLed1"];
YColorLed *colorled = [YColorLed FindColorLed:@"YRGBLED1-123456.MaFonction"];
YColorLed *colorled = [YColorLed FindColorLed:@"MonModule.colorLed1"];
YColorLed *colorled = [YColorLed FindColorLed:@"MonModule.MaFonction"];
YColorLed *colorled = [YColorLed FindColorLed:@"MaFonction"];
[YColorLed FindColorLed] renvoie un objet que vous pouvez ensuite utiliser à loisir pour contrôler la LED RGB.
isOnline
La méthode isOnline de l'objet renvoyé par [YColorLed FindColorLed] permet de savoir si le module correspondant est présent et en état de marche.
set_rgbColor
La méthode set_rgbColor() de l'objet renvoyé par YColorLed.FindColorLed permet de régler la couleur de la led correspondante. La Couleur est donnée en coordonnées RGB codées sous forme d'un entier.
rgbMove
Il existe une méthode alternative pour changer de couleur. La méthode rgbMove() de l'objet renvoyé par YColorLed.FindColorLed permet de lancer une transition entre la couleur courante et une autre couleur RGB donnée en paramètre. Cette fonction prend aussi en paramètre le temps accordé pour effecter la transition.
Les méthodes set_rgbColor() et rgbMove() existent aussi en version HSL. En guise d'exercice, vous pourriez modifier l'exemple ci'dessous pour utiliser le système HSL. Vous pourriez ainsi observer les différences de comportement. En HSL pour le rouge est codé 0xFFFF80, le vert est codé 0x55FF80 et du bleu est codé 0xA9FF80.
10.2. Contrôle de la partie module
Chaque module peut-être contrôlé d'une manière similaire, vous trouverez ci dessous un simple programme d'exemple affichant les principaux paramètres d'un module et permettant d'activer la balise de localisation.
#import "yocto_api.h"
static void usage(const char *exe)
{
NSLog(@"usage: %s <serial or logical name> [ON/OFF]\n", exe);
exit(1);
}
int main (int argc, const char * argv[])
{
NSError *error;
@autoreleasepool {
// Setup the API to use local USB devices
if([YAPI RegisterHub:@"usb": &error] != YAPI_SUCCESS) {
NSLog(@"RegisterHub error: %@", [error localizedDescription]);
return 1;
}
if(argc < 2)
usage(argv[0]);
NSString *serial_or_name = [NSString stringWithUTF8String:argv[1]];
// use serial or logical name
YModule *module = [YModule FindModule:serial_or_name];
if ([module isOnline]) {
if (argc > 2) {
if (strcmp(argv[2], "ON") == 0)
[module setBeacon:Y_BEACON_ON];
else
[module setBeacon:Y_BEACON_OFF];
}
NSLog(@"serial: %@\n", [module serialNumber]);
NSLog(@"logical name: %@\n", [module logicalName]);
NSLog(@"luminosity: %d\n", [module luminosity]);
NSLog(@"beacon: ");
if ([module beacon] == Y_BEACON_ON)
NSLog(@"ON\n");
else
NSLog(@"OFF\n");
NSLog(@"upTime: %ld sec\n", [module upTime] / 1000);
NSLog(@"USB current: %d mA\n", [module usbCurrent]);
NSLog(@"logs: %@\n", [module get_lastLogs]);
} else {
NSLog(@"%@ not connected (check identification and USB cable)\n",
serial_or_name);
}
[YAPI FreeAPI];
}
return 0;
}
Chaque propriété xxx du module peut être lue grâce à une méthode du type get_xxxx, et les propriétés qui se sont pas en lecture seule peuvent être modifiées à l'aide de la méthode set_xxx: Pour plus de détails concernant ces fonctions utilisées, reportez-vous aux chapitre API
Modifications des réglages du module
Lorsque que vous souhaitez modifier les réglages d'un module, il suffit d'appeler la fonction set_xxx: correspondante, cependant cette modification n'a lieu que dans la mémoire vive du module: si le module redémarre, les modifications seront perdues. Pour qu'elle soient mémorisées de manière persistante, il est nécessaire de demander au module de sauvegarder sa configuration courante dans sa mémoire non volatile. Pour cela il faut utiliser la méthode saveToFlash. Inversement il est possible de forcer le module à oublier ses réglages courants en utilisant la méthode revertFromFlash. Ce petit exemple ci-dessous vous permet changer le nom logique d'un module.
#import "yocto_api.h"
static void usage(const char *exe)
{
NSLog(@"usage: %s <serial> <newLogicalName>\n", exe);
exit(1);
}
int main (int argc, const char * argv[])
{
NSError *error;
@autoreleasepool {
// Setup the API to use local USB devices
if([YAPI RegisterHub:@"usb" :&error] != YAPI_SUCCESS) {
NSLog(@"RegisterHub error: %@", [error localizedDescription]);
return 1;
}
if(argc < 2)
usage(argv[0]);
NSString *serial_or_name = [NSString stringWithUTF8String:argv[1]];
// use serial or logical name
YModule *module = [YModule FindModule:serial_or_name];
if (module.isOnline) {
if (argc >= 3) {
NSString *newname = [NSString stringWithUTF8String:argv[2]];
if (![YAPI CheckLogicalName:newname]) {
NSLog(@"Invalid name (%@)\n", newname);
usage(argv[0]);
}
module.logicalName = newname;
[module saveToFlash];
}
NSLog(@"Current name: %@\n", module.logicalName);
} else {
NSLog(@"%@ not connected (check identification and USB cable)\n",
serial_or_name);
}
[YAPI FreeAPI];
}
return 0;
}
Attention, le nombre de cycles d'écriture de la mémoire non volatile du module est limité. Passé cette limite plus rien ne garantit que la sauvegarde des réglages se passera correctement. Cette limite, liée à la technologie employée par le micro-processeur du module se situe aux alentour de 100000 cycles. Pour résumer vous ne pouvez employer la fonction saveToFlash que 100000 fois au cours de la vie du module. Veillez donc à ne pas appeler cette fonction depuis l'intérieur d'une boucle.
Enumeration des modules
Obtenir la liste des modules connectés se fait à l'aide de la fonction yFirstModule() qui renvoie le premier module trouvé, il suffit ensuite d'appeler la fonction nextModule() de cet objet pour trouver les modules suivants, et ce tant que la réponse n'est pas un NULL. Ci-dessous un petit exemple listant les module connectés
#import "yocto_api.h"
int main (int argc, const char * argv[])
{
NSError *error;
@autoreleasepool {
// Setup the API to use local USB devices
if([YAPI RegisterHub:@"usb" :&error] != YAPI_SUCCESS) {
NSLog(@"RegisterHub error: %@\n", [error localizedDescription]);
return 1;
}
NSLog(@"Device list:\n");
YModule *module = [YModule FirstModule];
while (module != nil) {
NSLog(@"%@ %@", module.serialNumber, module.productName);
module = [module nextModule];
}
[YAPI FreeAPI];
}
return 0;
}
10.3. Gestion des erreurs
Lorsque vous implémentez un programme qui doit interagir avec des modules USB, vous ne pouvez pas faire abstraction de la gestion des erreurs. Il y aura forcément une occasion où un utilisateur aura débranché le périphérique, soit avant de lancer le programme, soit même en pleine opération. La librairie Yoctopuce est prévue pour vous aider à supporter ce genre de comportements, mais votre code doit néanmoins être fait pour se comporter au mieux pour interpréter les erreurs signalées par la librairie.
La manière la plus simple de contourner le problème est celle que nous avons employé pour les petits exemples précédents de ce chapitre: avant d'accéder à un module, on vérifie qu'il est en ligne avec la méthode isOnline() et on suppose ensuite qu'il va y rester pendant la fraction de seconde nécessaire à exécuter les lignes de code suivantes. Ce n'est pas parfait, mais ça peut suffire dans certains cas. Il faut toutefois être conscient qu'on ne peut pas totalement exclure une erreur se produisant après le isOnline(), qui pourrait faire planter le programme. La seule manière de l'éviter est d'implémenter une des deux techniques de gestion des erreurs décrites ci-dessous.
La méthode recommandée par la plupart des langages de programmation pour la gestion des erreurs imprévisibles est l'utilisation d'exceptions. C'est le comportement par défaut de la librairie Yoctopuce. Si une erreur se produit alors qu'on essaie d'accéder à un module, la librairie va lancer une exception. Dans ce cas, de trois choses l'une:
- Si votre code attrape l'exception au vol et la gère, et tout se passe bien.
- Si votre programme tourne dans le debugger, vous pourrez relativement facilement déterminer où le problème s'est produit, et voir le message explicatif lié à l'exception.
- Sinon... l'exception va crasher votre programme, boum!
Comme cette dernière situation n'est pas la plus souhaitable, la librairie Yoctopuce offre une autre alternative pour la gestion des erreurs, permettant de faire un programme robuste sans devoir attraper les exceptions à chaque ligne de code. Il suffit d'appeler la fonction YAPI.DisableExceptions() pour commuter la librairie dans un mode où les exceptions de chaque fonction sont systématiquement remplacées par des valeurs de retour particulières, qui peuvent être testées par l'appelant lorsque c'est pertinent. Le nom de la valeur de retour en cas d'erreur pour chaque fonction est systématiquement documenté dans la référence de la librairie. Il suit toujours la même logique: une méthode get_state() retournera une valeur Y_STATE_INVALID, une méthode get_currentValue retournera une valeur Y_CURRENTVALUE_INVALID, etc. Dans tous les cas, la valeur retournée sera du type attendu, et ne sera pas un pointeur nul qui risquerait de faire crasher votre programme. Au pire, si vous affichez la valeur sans la tester, elle sera hors du cadre attendu pour la valeur retournée. Dans le cas de fonctions qui ne retournent à priori pas d'information, la valeur de retour sera YAPI_SUCCESS si tout va bien, et un code d'erreur différent en cas d'échec.
Quand vous travaillez sans les exceptions, il est possible d'obtenir un code d'erreur et un message expliquant l'origine de l'erreur en le demandant à l'objet qui a retourné une erreur à l'aide des méthodes errType() et errMessage(). Ce sont les même informations qui auraient été associées à l'exception si elles avaient été actives.
11. Utilisation du Yocto-Color en VisualBasic .NET
VisualBasic a longtemps été la porte d'entrée privilégiée vers le monde Microsoft. Nous nous devions donc d'offrir notre interface pour ce langage, même si la nouvelle tendance est le C#. Tous les exemples et les modèles de projet sont testés avec Microsoft Visual Basic 2010 Express, disponible gratuitement sur le site de Microsoft 28.
11.1. Installation
Téléchargez la librairie Yoctopuce pour Visual Basic depuis le site web de Yoctopuce29. Il n'y a pas de programme d'installation, copiez simplement de contenu du fichier zip dans le répertoire de votre choix. Vous avez besoin essentiellement du contenu du répertoire Sources. Les autres répertoires contiennent la documentation et quelques programmes d'exemple. Les projets d'exemple sont des projets Visual Basic 2010, si vous utilisez une version antérieure, il est possible que vous ayez à reconstruire la structure de ces projets.
11.2. Utilisation l'API yoctopuce dans un projet Visual Basic
La librairie Yoctopuce pour Visual Basic .NET se présente sous la forme d'une DLL et de fichiers sources en Visual Basic. La DLL n'est pas une DLL .NET mais une DLL classique, écrite en C, qui gère les communications à bas niveau avec les modules30. Les fichiers sources en Visual Basic gèrent la partie haut niveau de l'API. Vous avez donc besoin de cette DLL et des fichiers .vb du répertoire Sources pour créer un projet gérant des modules Yoctopuce.
Configuration d'un projet Visual Basic
Les indications ci-dessous sont fournies pour Visual Studio express 2010, mais la procédure est semblable pour les autres versions.
Commencez par créer votre projet, puis depuis le panneau Explorateur de solutions effectuez un clic droit sur votre projet, et choisissez Ajouter puis Elément existant.
Une fenêtre de sélection de fichiers apparaît: sélectionnez le fichier yocto_api.vb et les fichiers correspondant aux fonctions des modules Yoctopuce que votre projet va gérer. Dans le doute, vous pouvez aussi sélectionner tous les fichiers.
Vous avez alors le choix entre simplement ajouter ces fichiers à votre projet, ou les ajouter en tant que lien (le bouton Ajouter est en fait un menu déroulant). Dans le premier cas, Visual Studio va copier les fichiers choisis dans votre projet, dans le second Visual Studio va simplement garder un lien sur les fichiers originaux. Il est recommandé d'utiliser des liens, une éventuelle mise à jour de la librairie sera ainsi beaucoup plus facile.
Ensuite, ajoutez de la même manière la dll yapi.dll, qui se trouve dans le répertoire Sources/dll31. Puis depuis la fenêtre Explorateur de solutions, effectuez un clic droit sur la DLL, choisissez Propriété et dans le panneau Propriétés, mettez l'option Copier dans le répertoire de sortie à toujours copier. Vous êtes maintenant prêt à utiliser vos modules Yoctopuce depuis votre environnement Visual Studio.
Afin de les garder simples, tous les exemples fournis dans cette documentation sont des applications consoles. Il va de soit que que les fonctionnement des librairies est strictement identiques si vous les intégrez dans une application dotée d'une interface graphique.
11.3. Contrôle de la fonction ColorLed
Il suffit de quelques lignes de code pour piloter un Yocto-Color. Voici le squelette d'un fragment de code VisualBasic .NET qui utilise la fonction ColorLed.
[...]
Dim errmsg As String
Dim colorled As YColorLed
REM On récupère l'objet représentant le module (ici connecté en local sur USB)
yRegisterHub("usb", errmsg)
colorled = yFindColorLed("YRGBLED1-123456.colorLed1")
REM Pour gérer le hot-plug, on vérifie que le module est là
If (colorled.isOnline()) Then
REM Utiliser colorled.set_rgbColor(), ...
End If
Voyons maintenant en détail ce que font ces quelques lignes.
yRegisterHub
La fonction yRegisterHub initialise l'API de Yoctopuce en indiquant où les modules doivent être recherchés. Utilisée avec le paramètre "usb", elle permet de travailler avec les modules connectés localement à la machine. Si l'initialisation se passe mal, cette fonction renverra une valeur différente de YAPI_SUCCESS, et retournera via le paramètre errmsg un explication du problème.
yFindColorLed
La fonction yFindColorLed, permet de retrouver une LED RGB en fonction du numéro de série de son module hôte et de son nom de fonction. Mais vous pouvez tout aussi bien utiliser des noms logiques que vous auriez préalablement configurés. Imaginons un module Yocto-Color avec le numéros de série YRGBLED1-123456 que vous auriez appelé "MonModule" et dont vous auriez nommé la fonction colorLed1 "MaFonction", les cinq appels suivants seront strictement équivalents (pour autant que MaFonction ne soit définie qu'une fois, pour éviter toute ambiguïté):
colorled = yFindColorLed("YRGBLED1-123456.colorLed1")
colorled = yFindColorLed("YRGBLED1-123456.MaFonction")
colorled = yFindColorLed("MonModule.colorLed1")
colorled = yFindColorLed("MonModule.MaFonction")
colorled = yFindColorLed("MaFonction")
yFindColorLed renvoie un objet que vous pouvez ensuite utiliser à loisir pour contrôler la LED RGB.
isOnline
La méthode isOnline() de l'objet renvoyé par yFindColorLed permet de savoir si le module correspondant est présent et en état de marche.
set_rgbColor
La méthode set_rgbColor() de l'objet renvoyé par yFindColorLed permet de régler la couleur de la led correspondante. La Couleur est donnée en coordonnées RGB codées sous forme d'un entier.
rgbMove
Il existe une méthode alternative pour changer de couleur. La méthode rgbMove() de l'objet renvoyé par yFindColorLed permet de lancer une transition entre la couleur courante et une autre couleur RGB donnée en paramètre. Cette fonction prend aussi en paramètre le temps accordé pour effecter la transition.
Les méthodes set_rgbColor() et rgbMove() existent aussi en version HSL. En guise d'exercice, vous pourriez modifier l'exemple ci'dessous pour utiliser le système HSL. Vous pourriez ainsi observer les différences de comportement. En HSL pour le rouge est codé 0xFFFF80, le vert est codé 0x55FF80 et du bleu est codé 0xA9FF80.
Un exemple réel
Lancez Microsoft VisualBasic et ouvrez le projet exemple correspondant, fourni dans le répertoire Examples/Doc-GettingStarted-Yocto-Color de la librairie Yoctopuce.
Vous reconnaîtrez dans cet exemple l'utilisation des fonctions expliquées ci-dessus, cette fois utilisées avec le décorum nécessaire à en faire un petit programme d'exemple concret.
Private Sub Usage()
Dim execname = System.AppDomain.CurrentDomain.FriendlyName
Console.WriteLine("Usage:")
Console.WriteLine(execname + " <serial_number> [ color | rgb ]")
Console.WriteLine(execname + " <logical_name> [ color | rgb ]")
Console.WriteLine(execname + " any [ color | rgb ] ")
Console.WriteLine("Eg.")
Console.WriteLine(execname + " any FF1493 ")
Console.WriteLine(execname + " YRGBLED1-123456 red")
System.Threading.Thread.Sleep(2500)
End
End Sub
Sub Main()
Dim argv() As String = System.Environment.GetCommandLineArgs()
Dim errmsg As String = ""
Dim target As String
Dim led1 As YColorLed
Dim led2 As YColorLed
Dim color_str As String
Dim color As Integer
If argv.Length < 3 Then Usage()
target = argv(1)
color_str = argv(2).ToUpper()
If (color_str = "RED") Then
color = &HFF0000
ElseIf (color_str = "GREEN") Then
color = &HFF00
ElseIf (color_str = "BLUE") Then
color = &HFF
Else
color = CInt(Val("&H" + color_str))
End If
REM Setup the API to use local USB devices
If (yRegisterHub("usb", errmsg) <> YAPI_SUCCESS) Then
Console.WriteLine("RegisterHub error: " + errmsg)
End
End If
If target = "any" Then
led1 = yFirstColorLed()
If led1 Is Nothing Then
Console.WriteLine("No module connected (check USB cable) ")
End
End If
led2 = led1.nextColorLed()
Else
led1 = yFindColorLed(target + ".colorLed1")
led2 = yFindColorLed(target + ".colorLed2")
End If
If (led1.isOnline()) Then
led1.set_rgbColor(color) REM immediate switch
led2.rgbMove(color, 1000) REM smooth transition
Else
Console.WriteLine("Module not connected (check identification and USB cable)")
End If
yFreeAPI()
End Sub
End Module
11.4. Contrôle de la partie module
Chaque module peut-être contrôlé d'une manière similaire, vous trouverez ci dessous un simple programme d'exemple affichant les principaux paramètres d'un module et permettant d'activer la balise de localisation.
Imports System.IO
Imports System.Environment
Module Module1
Sub usage()
Console.WriteLine("usage: demo <serial or logical name> [ON/OFF]")
End
End Sub
Sub Main()
Dim argv() As String = System.Environment.GetCommandLineArgs()
Dim errmsg As String = ""
Dim m As ymodule
If (yRegisterHub("usb", errmsg) <> YAPI_SUCCESS) Then
Console.WriteLine("RegisterHub error:" + errmsg)
End
End If
If argv.Length < 2 Then usage()
m = yFindModule(argv(1)) REM use serial or logical name
If (m.isOnline()) Then
If argv.Length > 2 Then
If argv(2) = "ON" Then m.set_beacon(Y_BEACON_ON)
If argv(2) = "OFF" Then m.set_beacon(Y_BEACON_OFF)
End If
Console.WriteLine("serial: " + m.get_serialNumber())
Console.WriteLine("logical name: " + m.get_logicalName())
Console.WriteLine("luminosity: " + Str(m.get_luminosity()))
Console.Write("beacon: ")
If (m.get_beacon() = Y_BEACON_ON) Then
Console.WriteLine("ON")
Else
Console.WriteLine("OFF")
End If
Console.WriteLine("upTime: " + Str(m.get_upTime() / 1000) + " sec")
Console.WriteLine("USB current: " + Str(m.get_usbCurrent()) + " mA")
Console.WriteLine("Logs:")
Console.WriteLine(m.get_lastLogs())
Else
Console.WriteLine(argv(1) + " not connected (check identification and USB cable)")
End If
yFreeAPI()
End Sub
End Module
Chaque propriété xxx du module peut être lue grâce à une méthode du type get_xxxx(), et les propriétés qui se sont pas en lecture seule peuvent être modifiées à l'aide de la méthode set_xxx() Pour plus de détails concernant ces fonctions utilisées, reportez-vous aux chapitre API
Modifications des réglages du module
Lorsque que vous souhaitez modifier les réglages d'un module, il suffit d'appeler la fonction set_xxx() correspondante, cependant cette modification n'a lieu que dans la mémoire vive du module: si le module redémarre, les modifications seront perdues. Pour qu'elle soient mémorisées de manière persistante, il est nécessaire de demander au module de sauvegarder sa configuration courante dans sa mémoire non volatile. Pour cela il faut utiliser la méthode saveToFlash(). Inversement il est possible de forcer le module à oublier ses réglages courants en utilisant la méthode revertFromFlash(). Ce petit exemple ci-dessous vous permet changer le nom logique d'un module.
Sub usage()
Console.WriteLine("usage: demo <serial or logical name> <new logical name>")
End
End Sub
Sub Main()
Dim argv() As String = System.Environment.GetCommandLineArgs()
Dim errmsg As String = ""
Dim newname As String
Dim m As YModule
If (argv.Length <> 3) Then usage()
REM Setup the API to use local USB devices
If yRegisterHub("usb", errmsg) <> YAPI_SUCCESS Then
Console.WriteLine("RegisterHub error: " + errmsg)
End
End If
m = yFindModule(argv(1)) REM use serial or logical name
If m.isOnline() Then
newname = argv(2)
If (Not yCheckLogicalName(newname)) Then
Console.WriteLine("Invalid name (" + newname + ")")
End
End If
m.set_logicalName(newname)
m.saveToFlash() REM do not forget this
Console.Write("Module: serial= " + m.get_serialNumber)
Console.Write(" / name= " + m.get_logicalName())
Else
Console.Write("not connected (check identification and USB cable")
End If
yFreeAPI()
End Sub
End Module
Attention, le nombre de cycles d'écriture de la mémoire non volatile du module est limité. Passé cette limite plus rien ne garantit que la sauvegarde des réglages se passera correctement. Cette limite, liée à la technologie employée par le micro-processeur du module se situe aux alentour de 100000 cycles. Pour résumer vous ne pouvez employer la fonction saveToFlash() que 100000 fois au cours de la vie du module. Veillez donc à ne pas appeler cette fonction depuis l'intérieur d'une boucle.
Enumeration des modules
Obtenir la liste des modules connectés se fait à l'aide de la fonction yFirstModule() qui renvoie le premier module trouvé, il suffit ensuite d'appeler la fonction nextModule() de cet objet pour trouver les modules suivants, et ce tant que la réponse n'est pas un Nothing. Ci-dessous un petit exemple listant les module connectés
Sub Main()
Dim M As ymodule
Dim errmsg As String = ""
REM Setup the API to use local USB devices
If yRegisterHub("usb", errmsg) <> YAPI_SUCCESS Then
Console.WriteLine("RegisterHub error: " + errmsg)
End
End If
Console.WriteLine("Device list")
M = yFirstModule()
While M IsNot Nothing
Console.WriteLine(M.get_serialNumber() + " (" + M.get_productName() + ")")
M = M.nextModule()
End While
yFreeAPI()
End Sub
End Module
11.5. Gestion des erreurs
Lorsque vous implémentez un programme qui doit interagir avec des modules USB, vous ne pouvez pas faire abstraction de la gestion des erreurs. Il y aura forcément une occasion où un utilisateur aura débranché le périphérique, soit avant de lancer le programme, soit même en pleine opération. La librairie Yoctopuce est prévue pour vous aider à supporter ce genre de comportements, mais votre code doit néanmoins être fait pour se comporter au mieux pour interpréter les erreurs signalées par la librairie.
La manière la plus simple de contourner le problème est celle que nous avons employé pour les petits exemples précédents de ce chapitre: avant d'accéder à un module, on vérifie qu'il est en ligne avec la méthode isOnline() et on suppose ensuite qu'il va y rester pendant la fraction de seconde nécessaire à exécuter les lignes de code suivantes. Ce n'est pas parfait, mais ça peut suffire dans certains cas. Il faut toutefois être conscient qu'on ne peut pas totalement exclure une erreur se produisant après le isOnline(), qui pourrait faire planter le programme. La seule manière de l'éviter est d'implémenter une des deux techniques de gestion des erreurs décrites ci-dessous.
La méthode recommandée par la plupart des langages de programmation pour la gestion des erreurs imprévisibles est l'utilisation d'exceptions. C'est le comportement par défaut de la librairie Yoctopuce. Si une erreur se produit alors qu'on essaie d'accéder à un module, la librairie va lancer une exception. Dans ce cas, de trois choses l'une:
- Si votre code attrape l'exception au vol et la gère, et tout se passe bien.
- Si votre programme tourne dans le debugger, vous pourrez relativement facilement déterminer où le problème s'est produit, et voir le message explicatif lié à l'exception.
- Sinon... l'exception va crasher votre programme, boum!
Comme cette dernière situation n'est pas la plus souhaitable, la librairie Yoctopuce offre une autre alternative pour la gestion des erreurs, permettant de faire un programme robuste sans devoir attraper les exceptions à chaque ligne de code. Il suffit d'appeler la fonction YAPI.DisableExceptions() pour commuter la librairie dans un mode où les exceptions de chaque fonction sont systématiquement remplacées par des valeurs de retour particulières, qui peuvent être testées par l'appelant lorsque c'est pertinent. Le nom de la valeur de retour en cas d'erreur pour chaque fonction est systématiquement documenté dans la référence de la librairie. Il suit toujours la même logique: une méthode get_state() retournera une valeur Y_STATE_INVALID, une méthode get_currentValue retournera une valeur Y_CURRENTVALUE_INVALID, etc. Dans tous les cas, la valeur retournée sera du type attendu, et ne sera pas un pointeur nul qui risquerait de faire crasher votre programme. Au pire, si vous affichez la valeur sans la tester, elle sera hors du cadre attendu pour la valeur retournée. Dans le cas de fonctions qui ne retournent à priori pas d'information, la valeur de retour sera YAPI_SUCCESS si tout va bien, et un code d'erreur différent en cas d'échec.
Quand vous travaillez sans les exceptions, il est possible d'obtenir un code d'erreur et un message expliquant l'origine de l'erreur en le demandant à l'objet qui a retourné une erreur à l'aide des méthodes errType() et errMessage(). Ce sont les même informations qui auraient été associées à l'exception si elles avaient été actives.
12. Utilisation du Yocto-Color en C#
C# (prononcez C-Sharp) est un langage orienté objet promu par Microsoft qui n'est pas sans rappeller Java. Tout comme Visual Basic et Delphi, il permet de créer des applications Windows relativement facilement. Tous les exemples et les modèles de projet sont testés avec Microsoft C# 2010 Express, disponible gratuitement sur le site de Microsoft 32.
12.1. Installation
Téléchargez la librairie Yoctopuce pour Visual C# depuis le site web de Yoctopuce33. Il n'y a pas de programme d'installation, copiez simplement de contenu du fichier zip dans le répertoire de votre choix. Vous avez besoin essentiellement du contenu du répertoire Sources. Les autres répertoires contiennent la documentation et quelques programmes d'exemple. Les projets d'exemple sont des projets Visual C# 2010, si vous utilisez une version antérieure, il est possible que vous ayez à reconstruire la structure de ces projets.
12.2. Utilisation l'API yoctopuce dans un projet Visual C#
La librairie Yoctopuce pour Visual C# .NET se présente sous la forme d'une DLL et de fichiers sources en Visual C#. La DLL n'est pas une DLL .NET mais une DLL classique, écrite en C, qui gère les communications à bas niveau avec les modules34. Les fichiers sources en Visual C# gèrent la partie haut niveau de l'API. Vous avez donc besoin de cette DLL et des fichiers .cs du répertoire Sources pour créer un projet gérant des modules Yoctopuce.
Configuration d'un projet Visual C#
Les indications ci-dessous sont fournies pour Visual Studio express 2010, mais la procédure est semblable pour les autres versions.
Commencez par créer votre projet, puis depuis le panneau Explorateur de solutions effectuez un clic droit sur votre projet, et choisissez Ajouter puis Elément existant.
Une fenêtre de sélection de fichiers apparaît: sélectionnez le fichier yocto_api.cs et les fichiers correspondant aux fonctions des modules Yoctopuce que votre projet va gérer. Dans le doute, vous pouvez aussi sélectionner tous les fichiers.
Vous avez alors le choix entre simplement ajouter ces fichiers à votre projet, ou les ajouter en tant que lien (le bouton Ajouter est en fait un menu déroulant). Dans le premier cas, Visual Studio va copier les fichiers choisis dans votre projet, dans le second Visual Studio va simplement garder un lien sur les fichiers originaux. Il est recommandé d'utiliser des liens, une éventuelle mise à jour de la librairie sera ainsi beaucoup plus facile.
Ensuite, ajoutez de la même manière la dll yapi.dll, qui se trouve dans le répertoire Sources/dll35. Puis depuis la fenêtre Explorateur de solutions, effectuez un clic droit sur la DLL, choisissez Propriété et dans le panneau Propriétés, mettez l'option Copier dans le répertoire de sortie à toujours copier. Vous êtes maintenant prêt à utiliser vos modules Yoctopuce depuis votre environnement Visual Studio.
Afin de les garder simples, tous les exemples fournis dans cette documentation sont des applications consoles. Il va de soit que que les fonctionnement des librairies est strictement identiques si vous les intégrez dans une application dotée d'une interface graphique.
12.3. Contrôle de la fonction ColorLed
Il suffit de quelques lignes de code pour piloter un Yocto-Color. Voici le squelette d'un fragment de code C# qui utilise la fonction ColorLed.
[...]
string errmsg = "";
YColorLed colorled;
// On récupère l'objet représentant le module (ici connecté en local sur USB)
YAPI.RegisterHub("usb", errmsg);
colorled = YColorLed.FindColorLed("YRGBLED1-123456.colorLed1");
// Pour gérer le hot-plug, on vérifie que le module est là
if (colorled.isOnline())
{ // Utiliser colorled.set_rgbColor(): ...
}
Voyons maintenant en détail ce que font ces quelques lignes.
YAPI.RegisterHub
La fonction YAPI.RegisterHub initialise l'API de Yoctopuce en indiquant où les modules doivent être recherchés. Utilisée avec le paramètre "usb", elle permet de travailler avec les modules connectés localement à la machine. Si l'initialisation se passe mal, cette fonction renverra une valeur différente de YAPI.SUCCESS, et retournera via le paramètre errmsg une explication du problème.
YColorLed.FindColorLed
La fonction YColorLed.FindColorLed, permet de retrouver une LED RGB en fonction du numéro de série de son module hôte et de son nom de fonction. Mais vous pouvez tout aussi bien utiliser des noms logiques que vous auriez préalablement configurés. Imaginons un module Yocto-Color avec le numéros de série YRGBLED1-123456 que vous auriez appelé "MonModule" et dont vous auriez nommé la fonction colorLed1 "MaFonction", les cinq appels suivants seront strictement équivalents (pour autant que MaFonction ne soit définie qu'une fois, pour éviter toute ambiguïté):
colorled = YColorLed.FindColorLed("YRGBLED1-123456.colorLed1");
colorled = YColorLed.FindColorLed("YRGBLED1-123456.MaFonction");
colorled = YColorLed.FindColorLed("MonModule.colorLed1");
colorled = YColorLed.FindColorLed("MonModule.MaFonction");
colorled = YColorLed.FindColorLed("MaFonction");
YColorLed.FindColorLed renvoie un objet que vous pouvez ensuite utiliser à loisir pour contrôler la LED RGB.
isOnline
La méthode YColorLed.isOnline() de l'objet renvoyé par FindColorLed permet de savoir si le module correspondant est présent et en état de marche.
set_rgbColor
La méthode set_rgbColor() de l'objet renvoyé par YColorLed.FindColorLed permet de régler la couleur de la led correspondante. La Couleur est donnée en coordonnées RGB codées sous forme d'un entier.
rgbMove
Il existe une méthode alternative pour changer de couleur. La méthode rgbMove() de l'objet renvoyé par YColorLed.FindColorLed permet de lancer une transition entre la couleur courante et une autre couleur RGB donnée en paramètre. Cette fonction prend aussi en paramètre le temps accordé pour effecter la transition.
Les méthodes set_rgbColor() et rgbMove() existent aussi en version HSL. En guise d'exercice, vous pourriez modifier l'exemple ci'dessous pour utiliser le système HSL. Vous pourriez ainsi observer les différences de comportement. En HSL pour le rouge est codé 0xFFFF80, le vert est codé 0x55FF80 et du bleu est codé 0xA9FF80.
Un exemple réel
Lancez Visual C# et ouvrez le projet exemple correspondant, fourni dans le répertoire Examples/Doc-GettingStarted-Yocto-Color de la librairie Yoctopuce.
Vous reconnaîtrez dans cet exemple l'utilisation des fonctions expliquées ci-dessus, cette fois utilisées avec le décorum nécessaire à en faire un petit programme d'exemple concret.
using System.Collections.Generic;
using System.Linq;
using System.Text;
namespace ConsoleApplication1
{
class Program
{
static void usage()
{
string execname = System.AppDomain.CurrentDomain.FriendlyName;
Console.WriteLine(execname + " <serial_number> [ color | rgb ]");
Console.WriteLine(execname + " <logical_name> [ color | rgb ]");
Console.WriteLine(execname + " any [ color | rgb ] ");
Console.WriteLine("Eg.");
Console.WriteLine(execname + " any FF1493 ");
Console.WriteLine(execname + " YRGBLED1-123456 red");
System.Threading.Thread.Sleep(2500);
Environment.Exit(0);
}
static void Main(string[] args)
{
string errmsg = "";
string target;
YColorLed led1;
YColorLed led2;
string color_str;
int color;
if (args.Length < 2) usage();
target = args[0].ToUpper();
color_str = args[1].ToUpper();
if (color_str == "RED") color = 0xFF0000;
else if (color_str == "GREEN") color = 0x00FF00;
else if (color_str == "BLUE") color = 0x0000FF;
else color = Convert.ToInt32("0x" + color_str, 16);
if (YAPI.RegisterHub("usb", ref errmsg) != YAPI.SUCCESS) {
Console.WriteLine("RegisterHub error: " + errmsg);
Environment.Exit(0);
}
if (target == "ANY") {
led1 = YColorLed.FirstColorLed();
if (led1 == null) {
Console.WriteLine("No module connected (check USB cable) ");
Environment.Exit(0);
}
led2 = led1.nextColorLed();
} else {
led1 = YColorLed.FindColorLed(target + ".colorLed1");
led2 = YColorLed.FindColorLed(target + ".colorLed2");
}
if (led1.isOnline()) {
led1.set_rgbColor(color);// immediate switch
led2.rgbMove(color, 1000); // smooth transition
} else {
Console.WriteLine("Module not connected (check identification and USB cable)");
}
YAPI.FreeAPI();
}
}
}
12.4. Contrôle de la partie module
Chaque module peut-être contrôlé d'une manière similaire, vous trouverez ci-dessous un simple programme d'exemple affichant les principaux paramètres d'un module et permettant d'activer la balise de localisation.
using System.Collections.Generic;
using System.Linq;
using System.Text;
namespace ConsoleApplication1
{
class Program
{
static void usage()
{
string execname = System.AppDomain.CurrentDomain.FriendlyName;
Console.WriteLine("Usage:");
Console.WriteLine(execname + " <serial or logical name> [ON/OFF]");
System.Threading.Thread.Sleep(2500);
Environment.Exit(0);
}
static void Main(string[] args)
{
YModule m;
string errmsg = "";
if (YAPI.RegisterHub("usb", ref errmsg) != YAPI.SUCCESS) {
Console.WriteLine("RegisterHub error: " + errmsg);
Environment.Exit(0);
}
if (args.Length < 1) usage();
m = YModule.FindModule(args[0]); // use serial or logical name
if (m.isOnline()) {
if (args.Length >= 2) {
if (args[1].ToUpper() == "ON") {
m.set_beacon(YModule.BEACON_ON);
}
if (args[1].ToUpper() == "OFF") {
m.set_beacon(YModule.BEACON_OFF);
}
}
Console.WriteLine("serial: " + m.get_serialNumber());
Console.WriteLine("logical name: " + m.get_logicalName());
Console.WriteLine("luminosity: " + m.get_luminosity().ToString());
Console.Write("beacon: ");
if (m.get_beacon() == YModule.BEACON_ON)
Console.WriteLine("ON");
else
Console.WriteLine("OFF");
Console.WriteLine("upTime: " + (m.get_upTime() / 1000 ).ToString() + " sec");
Console.WriteLine("USB current: " + m.get_usbCurrent().ToString() + " mA");
Console.WriteLine("Logs:\r\n" + m.get_lastLogs());
} else {
Console.WriteLine(args[0] + " not connected (check identification and USB cable)");
}
YAPI.FreeAPI();
}
}
}
Chaque propriété xxx du module peut être lue grâce à une méthode du type YModule.get_xxxx(), et les propriétés qui se sont pas en lecture seule peuvent être modifiées à l'aide de la méthode YModule.set_xxx() Pour plus de détails concernant ces fonctions utilisées, reportez-vous aux chapitre API
Modifications des réglages du module
Lorsque que vous souhaitez modifier les réglages d'un module, il suffit d'appeler la fonction YModule.set_xxx() correspondante, cependant cette modification n'a lieu que dans la mémoire vive du module: si le module redémarre, les modifications seront perdues. Pour qu'elle soient mémorisées de manière persistante, il est nécessaire de demander au module de sauvegarder sa configuration courante dans sa mémoire non volatile. Pour cela il faut utiliser la méthode YModule.saveToFlash(). Inversement il est possible de forcer le module à oublier ses réglages courants en utilisant la méthode YModule.revertFromFlash(). Ce petit exemple ci-dessous vous permet changer le nom logique d'un module.
using System.Collections.Generic;
using System.Linq;
using System.Text;
namespace ConsoleApplication1
{
class Program
{
static void usage()
{
string execname = System.AppDomain.CurrentDomain.FriendlyName;
Console.WriteLine("Usage:");
Console.WriteLine("usage: demo <serial or logical name> <new logical name>");
System.Threading.Thread.Sleep(2500);
Environment.Exit(0);
}
static void Main(string[] args)
{
YModule m;
string errmsg = "";
string newname;
if (args.Length != 2) usage();
if (YAPI.RegisterHub("usb", ref errmsg) != YAPI.SUCCESS) {
Console.WriteLine("RegisterHub error: " + errmsg);
Environment.Exit(0);
}
m = YModule.FindModule(args[0]); // use serial or logical name
if (m.isOnline()) {
newname = args[1];
if (!YAPI.CheckLogicalName(newname)) {
Console.WriteLine("Invalid name (" + newname + ")");
Environment.Exit(0);
}
m.set_logicalName(newname);
m.saveToFlash(); // do not forget this
Console.Write("Module: serial= " + m.get_serialNumber());
Console.WriteLine(" / name= " + m.get_logicalName());
} else {
Console.Write("not connected (check identification and USB cable");
}
YAPI.FreeAPI();
}
}
}
Attention, le nombre de cycles d'écriture de la mémoire non volatile du module est limité. Passé cette limite plus rien ne garantit que la sauvegarde des réglages se passera correctement. Cette limite, liée à la technologie employée par le micro-processeur du module se situe aux alentour de 100000 cycles. Pour résumer vous ne pouvez employer la fonction YModule.saveToFlash() que 100000 fois au cours de la vie du module. Veillez donc à ne pas appeler cette fonction depuis l'intérieur d'une boucle.
Enumeration des modules
Obtenir la liste des modules connectés se fait à l'aide de la fonction YModule.yFirstModule() qui renvoie le premier module trouvé, il suffit ensuite d'appeler la méthode nextModule() de cet objet pour trouver les modules suivants, et ce tant que la réponse n'est pas un null. Ci-dessous un petit exemple listant les module connectés
using System.Collections.Generic;
using System.Linq;
using System.Text;
namespace ConsoleApplication1
{
class Program
{
static void Main(string[] args)
{
YModule m;
string errmsg = "";
if (YAPI.RegisterHub("usb", ref errmsg) != YAPI.SUCCESS) {
Console.WriteLine("RegisterHub error: " + errmsg);
Environment.Exit(0);
}
Console.WriteLine("Device list");
m = YModule.FirstModule();
while (m != null) {
Console.WriteLine(m.get_serialNumber() + " (" + m.get_productName() + ")");
m = m.nextModule();
}
YAPI.FreeAPI();
}
}
}
12.5. Gestion des erreurs
Lorsque vous implémentez un programme qui doit interagir avec des modules USB, vous ne pouvez pas faire abstraction de la gestion des erreurs. Il y aura forcément une occasion où un utilisateur aura débranché le périphérique, soit avant de lancer le programme, soit même en pleine opération. La librairie Yoctopuce est prévue pour vous aider à supporter ce genre de comportements, mais votre code doit néanmoins être fait pour se comporter au mieux pour interpréter les erreurs signalées par la librairie.
La manière la plus simple de contourner le problème est celle que nous avons employé pour les petits exemples précédents de ce chapitre: avant d'accéder à un module, on vérifie qu'il est en ligne avec la méthode isOnline() et on suppose ensuite qu'il va y rester pendant la fraction de seconde nécessaire à exécuter les lignes de code suivantes. Ce n'est pas parfait, mais ça peut suffire dans certains cas. Il faut toutefois être conscient qu'on ne peut pas totalement exclure une erreur se produisant après le isOnline(), qui pourrait faire planter le programme. La seule manière de l'éviter est d'implémenter une des deux techniques de gestion des erreurs décrites ci-dessous.
La méthode recommandée par la plupart des langages de programmation pour la gestion des erreurs imprévisibles est l'utilisation d'exceptions. C'est le comportement par défaut de la librairie Yoctopuce. Si une erreur se produit alors qu'on essaie d'accéder à un module, la librairie va lancer une exception. Dans ce cas, de trois choses l'une:
- Si votre code attrape l'exception au vol et la gère, et tout se passe bien.
- Si votre programme tourne dans le debugger, vous pourrez relativement facilement déterminer où le problème s'est produit, et voir le message explicatif lié à l'exception.
- Sinon... l'exception va crasher votre programme, boum!
Comme cette dernière situation n'est pas la plus souhaitable, la librairie Yoctopuce offre une autre alternative pour la gestion des erreurs, permettant de faire un programme robuste sans devoir attraper les exceptions à chaque ligne de code. Il suffit d'appeler la fonction YAPI.DisableExceptions() pour commuter la librairie dans un mode où les exceptions de chaque fonction sont systématiquement remplacées par des valeurs de retour particulières, qui peuvent être testées par l'appelant lorsque c'est pertinent. Le nom de la valeur de retour en cas d'erreur pour chaque fonction est systématiquement documenté dans la référence de la librairie. Il suit toujours la même logique: une méthode get_state() retournera une valeur Y_STATE_INVALID, une méthode get_currentValue retournera une valeur Y_CURRENTVALUE_INVALID, etc. Dans tous les cas, la valeur retournée sera du type attendu, et ne sera pas un pointeur nul qui risquerait de faire crasher votre programme. Au pire, si vous affichez la valeur sans la tester, elle sera hors du cadre attendu pour la valeur retournée. Dans le cas de fonctions qui ne retournent à priori pas d'information, la valeur de retour sera YAPI_SUCCESS si tout va bien, et un code d'erreur différent en cas d'échec.
Quand vous travaillez sans les exceptions, il est possible d'obtenir un code d'erreur et un message expliquant l'origine de l'erreur en le demandant à l'objet qui a retourné une erreur à l'aide des méthodes errType() et errMessage(). Ce sont les même informations qui auraient été associées à l'exception si elles avaient été actives.
13. Utilisation du Yocto-Color en Delphi
Delphi est l'héritier de Turbo-Pascal. A l'origine, Delphi était produit par Borland, mais c'est maintenant Embarcadero qui l'édite. Sa force réside dans sa facilité d'utilisation, il permet à quiconque ayant des notions de Pascal de programmer une application Windows en deux temps trois mouvements. Son seul défaut est d'être payant36.
Les librairies pour Delphi sont fournies non pas sous forme de composants VCL, mais directement sous forme de fichiers source. Ces fichiers sont compatibles avec la plupart des version de Delphi 37.
Afin des les garder simples, tous les exemples fournis dans cette documentation sont des applications consoles. Il va de soit que le fonctionnement des librairies est strictement identique avec des applications VCL.
Vous allez rapidement vous rendre compte que l'API Delphi défini beaucoup de fonctions qui retournent des objets. Vous ne devez jamais désallouer ces objets vous-même. Ils seront désalloués automatiquement par l'API à la fin de l'application.
13.1. Préparation
Connectez-vous sur le site de Yoctopuce et téléchargez la la librairie Yoctopuce pour Delphi38. Décompressez le tout dans le répertoire de votre choix, et ajoutez le sous-répertoire sources de l'archive dans la liste des répertoires des librairies de Delphi39.
Par défaut la librairie Yoctopuce pour Delphi utilise une DLL yapi.dll, toutes les applications que vous créerez avec Delphi devront avoir accès à cette DLL. Le plus simple est de faire en sorte qu'elle soit présente dans le même répertoire que l'exécutable de votre application.
13.2. Contrôle de la fonction ColorLed
Lancez votre environnement Delphi, copiez la DLL yapi.dll dans un répertoire et créez une nouvelle application console dans ce même répertoire, et copiez-coller le code ci dessous.
{$APPTYPE CONSOLE}
uses
SysUtils,
yocto_api,
yocto_colorled;
Procedure Usage();
var
exe : string;
begin
exe:= ExtractFileName(paramstr(0));
WriteLn(exe+' <serial_number>');
WriteLn(exe+' <logical_name>');
WriteLn(exe+' any');
halt;
End;
procedure setcolor(led1,led2:TYColorLed; color:integer);
begin
if (led1.isOnline()) then
begin
led1.set_rgbColor(color); // immediate switch
led2.rgbMove(color,1000); // smooth transition
end
else Writeln('Module not connected (check identification and USB cable)');
end;
var
c : char;
led1,led2 : TYColorLed;
m : TYmodule;
errmsg : string;
serial : string;
begin
if (paramcount<1) then usage();
// Setup the API to use local USB devices
if yRegisterHub('usb', errmsg)<>YAPI_SUCCESS then
begin
Write('RegisterHub error: '+errmsg);
exit;
end;
// first one of the two RBG leds
if paramstr(1)='any' then
begin
led1 := yFirstColorLed();
if led1=nil then
begin
writeln('No module connected (check USB cable)');
halt;
end
end
else
led1:= YFindColorLed(paramstr(1)+'.colorled1');
// make sure it is online
if not(led1.isOnline()) then
begin
writeln('No module connected (check USB cable)');
halt;
end;
// lets find the device serial to find the second led
m := led1.Get_module();
serial := m.get_serialNumber();
led1 := yFindColorLed(serial+'.colorLed1');
led2 := yFindColorLed(serial+'.colorLed2');
Writeln('r: set to red');
Writeln('g: set to green');
Writeln('b: set to blue');
Writeln('x: exit');
repeat
read(c);
case c of
'r' : setcolor(led1,led2,$FF0000);
'g' : setcolor(led1,led2,$00FF00);
'b' : setcolor(led1,led2,$0000FF);
end;
until c='x';
yFreeAPI();
end.
Il n'y a que peu de lignes véritablement importantes dans le code précédent. Nous allons les expliquer en détail.
yocto_api et yocto_colorled
Ces deux unités permettent d'avoir accès aux fonctions permettant de gérer les modules Yoctopuce. yocto_api doit toujours être utilisé, yocto_colorled est nécessaire pour gérer les modules contenant une LED RGB, comme le Yocto-Color.
yRegisterHub
La fonction yRegisterHub initialise l'API de Yoctopuce en indiquant où les modules doivent être recherchés. Utilisée avec le paramètre 'usb', elle permet de travailler avec les modules connectés localement à la machine. Si l'initialisation se passe mal, cette fonction renverra une valeur différente de YAPI_SUCCESS, et retournera via le paramètre errmsg un explication du problème.
yFindColorLed
La fonction yFindColorLed, permet de retrouver une LED RGB en fonction du numéro de série de son module hôte et de son nom de fonction. Mais vous pouvez tout aussi bien utiliser des noms logiques que vous auriez préalablement configurés. Imaginons un module Yocto-Color avec le numéros de série YRGBLED1-123456 que vous auriez appelé "MonModule" et dont vous auriez nommé la fonction colorLed1 "MaFonction", les cinq appels suivants seront strictement équivalents (pour autant que MaFonction ne soit définie qu'une fois, pour éviter toute ambiguïté):
colorled := yFindColorLed("YRGBLED1-123456.colorLed1");
colorled := yFindColorLed("YRGBLED1-123456.MaFonction");
colorled := yFindColorLed("MonModule.colorLed1");
colorled := yFindColorLed("MonModule.MaFonction");
colorled := yFindColorLed("MaFonction");
yFindColorLed renvoie un objet que vous pouvez ensuite utiliser à loisir pour contrôler la LED RGB.
isOnline
La méthode isOnline() de l'objet renvoyé par yFindColorLed permet de savoir si le module correspondant est présent et en état de marche.
set_rgbColor
La méthode set_rgbColor() de l'objet renvoyé par yFindColorLed permet de régler la couleur de la led correspondante. La Couleur est donnée en coordonnées RGB codées sous forme d'un entier.
rgbMove
Il existe une méthode alternative pour changer de couleur. La méthode rgbMove() de l'objet renvoyé par yFindColorLed permet de lancer une transition entre la couleur courante et une autre couleur RGB donnée en paramètre. Cette fonction prend aussi en paramètre le temps accordé pour effecter la transition.
Les méthodes set_rgbColor() et rgbMove() existent aussi en version HSL. En guise d'exercice, vous pourriez modifier l'exemple ci'dessous pour utiliser le système HSL. Vous pourriez ainsi observer les différences de comportement. En HSL pour le rouge est codé 0xFFFF80, le vert est codé 0x55FF80 et du bleu est codé 0xA9FF80.
13.3. Contrôle de la partie module
Chaque module peut-être contrôlé d'une manière similaire, vous trouverez ci dessous un simple programme d'exemple affichant les principaux paramètres d'un module et permettant d'activer la balise de localisation.
{$APPTYPE CONSOLE}
uses
SysUtils,
yocto_api;
const
serial = 'YRGBLED1-123456'; // use serial number or logical name
procedure refresh(module:Tymodule) ;
begin
if (module.isOnline()) then
begin
Writeln('');
Writeln('Serial : ' + module.get_serialNumber());
Writeln('Logical name : ' + module.get_logicalName());
Writeln('Luminosity : ' + intToStr(module.get_luminosity()));
Write('Beacon :');
if (module.get_beacon()=Y_BEACON_ON) then Writeln('on')
else Writeln('off');
Writeln('uptime : ' + intToStr(module.get_upTime() div 1000)+'s');
Writeln('USB current : ' + intToStr(module.get_usbCurrent())+'mA');
Writeln('Logs : ');
Writeln(module.get_lastlogs());
Writeln('');
Writeln('r : refresh / b:beacon ON / space : beacon off');
end
else Writeln('Module not connected (check identification and USB cable)');
end;
procedure beacon(module:Tymodule;state:integer);
begin
module.set_beacon(state);
refresh(module);
end;
var
module : TYModule;
c : char;
errmsg : string;
begin
// Setup the API to use local USB devices
if yRegisterHub('usb', errmsg)<>YAPI_SUCCESS then
begin
Write('RegisterHub error: '+errmsg);
exit;
end;
module := yFindModule(serial);
refresh(module);
repeat
read(c);
case c of
'r': refresh(module);
'b': beacon(module,Y_BEACON_ON);
' ': beacon(module,Y_BEACON_OFF);
end;
until c = 'x';
yFreeAPI();
end.
Chaque propriété xxx du module peut être lue grâce à une méthode du type get_xxxx(), et les propriétés qui se sont pas en lecture seule peuvent être modifiées à l'aide de la méthode set_xxx() Pour plus de détails concernant ces fonctions utilisées, reportez-vous aux chapitre API
Modifications des réglages du module
Lorsque que vous souhaitez modifier les réglages d'un module, il suffit d'appeler la fonction set_xxx() correspondante, cependant cette modification n'a lieu que dans la mémoire vive du module: si le module redémarre, les modifications seront perdues. Pour qu'elle soient mémorisées de manière persistante, il est nécessaire de demander au module de sauvegarder sa configuration courante dans sa mémoire non volatile. Pour cela il faut utiliser la méthode saveToFlash(). Inversement il est possible de forcer le module à oublier ses réglages courants en utilisant la méthode revertFromFlash(). Ce petit exemple ci-dessous vous permet changer le nom logique d'un module.
{$APPTYPE CONSOLE}
uses
SysUtils,
yocto_api;
const
serial = 'YRGBLED1-123456'; // use serial number or logical name
var
module : TYModule;
errmsg : string;
newname : string;
begin
// Setup the API to use local USB devices
if yRegisterHub('usb', errmsg)<>YAPI_SUCCESS then
begin
Write('RegisterHub error: '+errmsg);
exit;
end;
module := yFindModule(serial);
if (not(module.isOnline)) then
begin
writeln('Module not connected (check identification and USB cable)');
exit;
end;
Writeln('Current logical name : '+module.get_logicalName());
Write('Enter new name : ');
Readln(newname);
if (not(yCheckLogicalName(newname))) then
begin
Writeln('invalid logical name');
exit;
end;
module.set_logicalName(newname);
module.saveToFlash();
yFreeAPI();
Writeln('logical name is now : '+module.get_logicalName());
end.
Attention, le nombre de cycles d'écriture de la mémoire non volatile du module est limité. Passé cette limite plus rien ne garantit que la sauvegarde des réglages se passera correctement. Cette limite, liée à la technologie employée par le micro-processeur du module se situe aux alentour de 100000 cycles. Pour résumer vous ne pouvez employer la fonction saveToFlash() que 100000 fois au cours de la vie du module. Veillez donc à ne pas appeler cette fonction depuis l'intérieur d'une boucle.
Énumération des modules
Obtenir la liste des modules connectés se fait à l'aide de la fonction yFirstModule() qui renvoie le premier module trouvé, il suffit ensuite d'appeler la fonction nextModule() de cet objet pour trouver les modules suivants, et ce tant que la réponse n'est pas un nil. Ci-dessous un petit exemple listant les module connectés
{$APPTYPE CONSOLE}
uses
SysUtils,
yocto_api;
var
module : TYModule;
errmsg : string;
begin
// Setup the API to use local USB devices
if yRegisterHub('usb', errmsg)<>YAPI_SUCCESS then
begin
Write('RegisterHub error: '+errmsg);
exit;
end;
Writeln('Device list');
module := yFirstModule();
while module<>nil do
begin
Writeln( module.get_serialNumber()+' ('+module.get_productName()+')');
module := module.nextModule();
end;
yFreeAPI();
end.
13.4. Gestion des erreurs
Lorsque vous implémentez un programme qui doit interagir avec des modules USB, vous ne pouvez pas faire abstraction de la gestion des erreurs. Il y aura forcément une occasion où un utilisateur aura débranché le périphérique, soit avant de lancer le programme, soit même en pleine opération. La librairie Yoctopuce est prévue pour vous aider à supporter ce genre de comportements, mais votre code doit néanmoins être fait pour se comporter au mieux pour interpréter les erreurs signalées par la librairie.
La manière la plus simple de contourner le problème est celle que nous avons employé pour les petits exemples précédents de ce chapitre: avant d'accéder à un module, on vérifie qu'il est en ligne avec la méthode isOnline() et on suppose ensuite qu'il va y rester pendant la fraction de seconde nécessaire à exécuter les lignes de code suivantes. Ce n'est pas parfait, mais ça peut suffire dans certains cas. Il faut toutefois être conscient qu'on ne peut pas totalement exclure une erreur se produisant après le isOnline(), qui pourrait faire planter le programme. La seule manière de l'éviter est d'implémenter une des deux techniques de gestion des erreurs décrites ci-dessous.
La méthode recommandée par la plupart des langages de programmation pour la gestion des erreurs imprévisibles est l'utilisation d'exceptions. C'est le comportement par défaut de la librairie Yoctopuce. Si une erreur se produit alors qu'on essaie d'accéder à un module, la librairie va lancer une exception. Dans ce cas, de trois choses l'une:
- Si votre code attrape l'exception au vol et la gère, et tout se passe bien.
- Si votre programme tourne dans le debugger, vous pourrez relativement facilement déterminer où le problème s'est produit, et voir le message explicatif lié à l'exception.
- Sinon... l'exception va crasher votre programme, boum!
Comme cette dernière situation n'est pas la plus souhaitable, la librairie Yoctopuce offre une autre alternative pour la gestion des erreurs, permettant de faire un programme robuste sans devoir attraper les exceptions à chaque ligne de code. Il suffit d'appeler la fonction YAPI.DisableExceptions() pour commuter la librairie dans un mode où les exceptions de chaque fonction sont systématiquement remplacées par des valeurs de retour particulières, qui peuvent être testées par l'appelant lorsque c'est pertinent. Le nom de la valeur de retour en cas d'erreur pour chaque fonction est systématiquement documenté dans la référence de la librairie. Il suit toujours la même logique: une méthode get_state() retournera une valeur Y_STATE_INVALID, une méthode get_currentValue retournera une valeur Y_CURRENTVALUE_INVALID, etc. Dans tous les cas, la valeur retournée sera du type attendu, et ne sera pas un pointeur nul qui risquerait de faire crasher votre programme. Au pire, si vous affichez la valeur sans la tester, elle sera hors du cadre attendu pour la valeur retournée. Dans le cas de fonctions qui ne retournent à priori pas d'information, la valeur de retour sera YAPI_SUCCESS si tout va bien, et un code d'erreur différent en cas d'échec.
Quand vous travaillez sans les exceptions, il est possible d'obtenir un code d'erreur et un message expliquant l'origine de l'erreur en le demandant à l'objet qui a retourné une erreur à l'aide des méthodes errType() et errMessage(). Ce sont les même informations qui auraient été associées à l'exception si elles avaient été actives.
14. Utilisation du Yocto-Color en Python
Python est un langage interprété orienté objet développé par Guido van Rossum. Il offre l'avantage d'être gratuit et d'être disponible pour la plupart de plate-formes tant Windows qu'Unix. C'est un language idéal pour écrire des petits scripts sur un coin de table. La librairie Yoctopuce est compatible avec Python 2.6+ et 3+. Elle fonctionne sous Windows, Max OS X et Linux tant Intel qu'ARM. La librairie a été testée avec Python 2.6 et Python 3.2. Les interpréteurs Python sont disponibles sur le site de Python 40.
14.1. Fichiers sources
Les classes de la librairie Yoctopuce41 pour Python que vous utiliserez vous sont fournies au format source. Copiez tout le contenu du répertoire Sources dans le répertoire de votre choix et ajoutez ce répertoire à la variable d'environnement PYTHONPATH. Si vous utilisez un IDE pour programmer en Python, référez-vous à sa documentation afin le configurer de manière à ce qu'il retrouve automatiquement les fichiers sources de l'API.
14.2. Librairie dynamique
Une partie de la librairie de bas-niveau est écrite en C, mais vous n'aurez a priori pas besoin d'interagir directement avec elle: cette partie est fournie sous forme de DLL sous Windows, de fichier .so sous Unix et de fichier .dylib sous Mac OS X. Tout a été fait pour que l'interaction avec cette librairie se fasse aussi simplement que possible depuis Python: les différentes versions de la librairie dynamique correspondant aux différents systèmes d'exploitation et architectures sont stockées dans le répertoire cdll. L'API va charger automatiquement le bon fichier lors de son initialisation. Vous n'aurez donc pas à vous en soucier.
Si un jour vous deviez vouloir recompiler la librairie dynamique, vous trouverez tout son code source dans la librairie Yoctopuce pour le C++.
Afin de les garder simples, tous les exemples fournis dans cette documentation sont des applications consoles. Il va de soit que que le fonctionnement des librairies est strictement identiques si vous les intégrez dans une application dotée d'une interface graphique.
14.3. Contrôle de la fonction ColorLed
Il suffit de quelques lignes de code pour piloter un Yocto-Color. Voici le squelette d'un fragment de code Python qui utilise la fonction ColorLed.
[...]
errmsg=YRefParam()
#On récupère l'objet représentant le module (ici connecté en local sur USB)
YAPI.RegisterHub("usb",errmsg)
colorled = YColorLed.FindColorLed("YRGBLED1-123456.colorLed1")
#Pour gérer le hot-plug, on vérifie que le module est là
if colorled.isOnline():
#Use colorled.set_rgbColor()
...
[...]
Voyons maintenant en détail ce que font ces quelques lignes.
YAPI.RegisterHub
La fonction YAPI.RegisterHub initialise l'API de Yoctopuce en indiquant où les modules doivent être recherchés. Utilisée avec le paramètre "usb", elle permet de travailler avec les modules connectés localement à la machine. Si l'initialisation se passe mal, cette fonction renverra une valeur différente de YAPI.SUCCESS, et retournera via l'objet errmsg une explication du problème.
YColorLed.FindColorLed
La fonction YColorLed.FindColorLed, permet de retrouver une LED RGB en fonction du numéro de série de son module hôte et de son nom de fonction. Mais vous pouvez tout aussi bien utiliser des noms logiques que vous auriez préalablement configurés. Imaginons un module Yocto-Color avec le numéros de série YRGBLED1-123456 que vous auriez appelé "MonModule" et dont vous auriez nommé la fonction colorLed1 "MaFonction", les cinq appels suivants seront strictement équivalents (pour autant que MaFonction ne soit définie qu'une fois, pour éviter toute ambiguïté):
colorled = YColorLed.FindColorLed("YRGBLED1-123456.colorLed1")
colorled = YColorLed.FindColorLed("YRGBLED1-123456.MaFonction")
colorled = YColorLed.FindColorLed("MonModule.colorLed1")
colorled = YColorLed.FindColorLed("MonModule.MaFonction")
colorled = YColorLed.FindColorLed("MaFonction")
YColorLed.FindColorLed renvoie un objet que vous pouvez ensuite utiliser à loisir pour contrôler la LED RGB.
isOnline
La méthode YColorLed.isOnline() de l'objet renvoyé par FindColorLed permet de savoir si le module correspondant est présent et en état de marche.
set_rgbColor
La méthode set_rgbColor() de l'objet renvoyé par YColorLed.FindColorLed permet de régler la couleur de la led correspondante. La Couleur est donnée en coordonnées RGB codées sous forme d'un entier.
rgbMove
Il existe une méthode alternative pour changer de couleur. La méthode rgbMove() de l'objet renvoyé par YColorLed.FindColorLed permet de lancer une transition entre la couleur courante et une autre couleur RGB donnée en paramètre. Cette fonction prend aussi en paramètre le temps accordé pour effecter la transition.
Les méthodes set_rgbColor() et rgbMove() existent aussi en version HSL. En guise d'exercice, vous pourriez modifier l'exemple ci'dessous pour utiliser le système HSL. Vous pourriez ainsi observer les différences de comportement. En HSL pour le rouge est codé 0xFFFF80, le vert est codé 0x55FF80 et du bleu est codé 0xA9FF80.
Un exemple réel
Lancez votre interpréteur Python et ouvrez le script correspondant, fourni dans le répertoire Examples/Doc-GettingStarted-Yocto-Color de la librairie Yoctopuce.
Vous reconnaîtrez dans cet exemple l'utilisation des fonctions expliquées ci-dessus, cette fois utilisées avec le décorum nécessaire à en faire un petit programme d'exemple concret.
# -*- coding: utf-8 -*-
import os, sys
from yocto_api import *
from yocto_colorled import *
def usage():
scriptname = os.path.basename(sys.argv[0])
print("Usage:")
print(scriptname + ' <serial_number>')
print(scriptname + ' <logical_name>')
print(scriptname + ' any ')
sys.exit()
def die(msg):
sys.exit(msg + ' (check USB cable)')
def setcolor(led1, led2, color):
if led1.isOnline():
led1.set_rgbColor(color) # immediate switch
led2.rgbMove(color, 1000) # smooth transition
else:
print('Module not connected (check identification and USB cable)')
errmsg = YRefParam()
if len(sys.argv) < 2:
usage()
target = sys.argv[1]
# Setup the API to use local USB devices
if YAPI.RegisterHub("usb", errmsg) != YAPI.SUCCESS:
sys.exit("init error" + errmsg.value)
if target == 'any':
# retreive any RGB led
led = YColorLed.FirstColorLed()
if led is None:
die('No module connected')
else:
led = YColorLed.FindColorLed(target + '.colorLed1')
# we need to retreive the second led from the device
if led.isOnline():
m = led.get_module()
led1 = YColorLed.FindColorLed(m.get_serialNumber() + '.colorLed1')
led2 = YColorLed.FindColorLed(m.get_serialNumber() + '.colorLed2')
else:
die('device not connected')
print('r: set to red')
print('g: set to green')
print('b: set to blue')
print('x: exit')
try:
input = raw_input # python 2.x fix
except:
pass
c = input("command:")
while c != 'x':
if c == 'r':
setcolor(led1, led2, 0xFF0000)
elif c == 'g':
setcolor(led1, led2, 0x00FF00)
elif c == 'b':
setcolor(led1, led2, 0x0000FF)
c = input("command:")
YAPI.FreeAPI()
14.4. Contrôle de la partie module
Chaque module peut-être contrôlé d'une manière similaire, vous trouverez ci-dessous un simple programme d'exemple affichant les principaux paramètres d'un module et permettant d'activer la balise de localisation.
# -*- coding: utf-8 -*-
import os, sys
from yocto_api import *
def usage():
sys.exit("usage: demo <serial or logical name> [ON/OFF]")
errmsg = YRefParam()
if YAPI.RegisterHub("usb", errmsg) != YAPI.SUCCESS:
sys.exit("RegisterHub error: " + str(errmsg))
if len(sys.argv) < 2:
usage()
m = YModule.FindModule(sys.argv[1]) # # use serial or logical name
if m.isOnline():
if len(sys.argv) > 2:
if sys.argv[2].upper() == "ON":
m.set_beacon(YModule.BEACON_ON)
if sys.argv[2].upper() == "OFF":
m.set_beacon(YModule.BEACON_OFF)
print("serial: " + m.get_serialNumber())
print("logical name: " + m.get_logicalName())
print("luminosity: " + str(m.get_luminosity()))
if m.get_beacon() == YModule.BEACON_ON:
print("beacon: ON")
else:
print("beacon: OFF")
print("upTime: " + str(m.get_upTime() / 1000) + " sec")
print("USB current: " + str(m.get_usbCurrent()) + " mA")
print("logs:\n" + m.get_lastLogs())
else:
print(sys.argv[1] + " not connected (check identification and USB cable)")
YAPI.FreeAPI()
Chaque propriété xxx du module peut être lue grâce à une méthode du type YModule.get_xxxx(), et les propriétés qui se sont pas en lecture seule peuvent être modifiées à l'aide de la méthode YModule.set_xxx() Pour plus de détails concernant ces fonctions utilisées, reportez-vous aux chapitre API
Modifications des réglages du module
Lorsque que vous souhaitez modifier les réglages d'un module, il suffit d'appeler la fonction YModule.set_xxx() correspondante, cependant cette modification n'a lieu que dans la mémoire vive du module: si le module redémarre, les modifications seront perdues. Pour qu'elle soient mémorisées de manière persistante, il est nécessaire de demander au module de sauvegarder sa configuration courante dans sa mémoire non volatile. Pour cela il faut utiliser la méthode YModule.saveToFlash(). Inversement il est possible de forcer le module à oublier ses réglages courants en utilisant la méthode YModule.revertFromFlash(). Ce petit exemple ci-dessous vous permet changer le nom logique d'un module.
# -*- coding: utf-8 -*-
import os, sys
from yocto_api import *
def usage():
sys.exit("usage: demo <serial or logical name> <new logical name>")
if len(sys.argv) != 3:
usage()
errmsg = YRefParam()
if YAPI.RegisterHub("usb", errmsg) != YAPI.SUCCESS:
sys.exit("RegisterHub error: " + str(errmsg))
m = YModule.FindModule(sys.argv[1]) # use serial or logical name
if m.isOnline():
newname = sys.argv[2]
if not YAPI.CheckLogicalName(newname):
sys.exit("Invalid name (" + newname + ")")
m.set_logicalName(newname)
m.saveToFlash() # do not forget this
print("Module: serial= " + m.get_serialNumber() + " / name= " + m.get_logicalName())
else:
sys.exit("not connected (check identification and USB cable")
YAPI.FreeAPI()
Attention, le nombre de cycles d'écriture de la mémoire non volatile du module est limité. Passé cette limite plus rien ne garantit que la sauvegarde des réglages se passera correctement. Cette limite, liée à la technologie employée par le micro-processeur du module se situe aux alentour de 100000 cycles. Pour résumer vous ne pouvez employer la fonction YModule.saveToFlash() que 100000 fois au cours de la vie du module. Veillez donc à ne pas appeler cette fonction depuis l'intérieur d'une boucle.
Enumeration des modules
Obtenir la liste des modules connectés se fait à l'aide de la fonction YModule.yFirstModule() qui renvoie le premier module trouvé, il suffit ensuite d'appeler la mehode nextModule() de cet objet pour trouver les modules suivants, et ce tant que la réponse n'est pas un null. Ci-dessous un petit exemple listant les module connectés
# -*- coding: utf-8 -*-
import os, sys
from yocto_api import *
errmsg = YRefParam()
# Setup the API to use local USB devices
if YAPI.RegisterHub("usb", errmsg) != YAPI.SUCCESS:
sys.exit("init error" + str(errmsg))
print('Device list')
module = YModule.FirstModule()
while module is not None:
print(module.get_serialNumber() + ' (' + module.get_productName() + ')')
module = module.nextModule()
YAPI.FreeAPI()
14.5. Gestion des erreurs
Lorsque vous implémentez un programme qui doit interagir avec des modules USB, vous ne pouvez pas faire abstraction de la gestion des erreurs. Il y aura forcément une occasion où un utilisateur aura débranché le périphérique, soit avant de lancer le programme, soit même en pleine opération. La librairie Yoctopuce est prévue pour vous aider à supporter ce genre de comportements, mais votre code doit néanmoins être fait pour se comporter au mieux pour interpréter les erreurs signalées par la librairie.
La manière la plus simple de contourner le problème est celle que nous avons employé pour les petits exemples précédents de ce chapitre: avant d'accéder à un module, on vérifie qu'il est en ligne avec la méthode isOnline() et on suppose ensuite qu'il va y rester pendant la fraction de seconde nécessaire à exécuter les lignes de code suivantes. Ce n'est pas parfait, mais ça peut suffire dans certains cas. Il faut toutefois être conscient qu'on ne peut pas totalement exclure une erreur se produisant après le isOnline(), qui pourrait faire planter le programme. La seule manière de l'éviter est d'implémenter une des deux techniques de gestion des erreurs décrites ci-dessous.
La méthode recommandée par la plupart des langages de programmation pour la gestion des erreurs imprévisibles est l'utilisation d'exceptions. C'est le comportement par défaut de la librairie Yoctopuce. Si une erreur se produit alors qu'on essaie d'accéder à un module, la librairie va lancer une exception. Dans ce cas, de trois choses l'une:
- Si votre code attrape l'exception au vol et la gère, et tout se passe bien.
- Si votre programme tourne dans le debugger, vous pourrez relativement facilement déterminer où le problème s'est produit, et voir le message explicatif lié à l'exception.
- Sinon... l'exception va crasher votre programme, boum!
Comme cette dernière situation n'est pas la plus souhaitable, la librairie Yoctopuce offre une autre alternative pour la gestion des erreurs, permettant de faire un programme robuste sans devoir attraper les exceptions à chaque ligne de code. Il suffit d'appeler la fonction YAPI.DisableExceptions() pour commuter la librairie dans un mode où les exceptions de chaque fonction sont systématiquement remplacées par des valeurs de retour particulières, qui peuvent être testées par l'appelant lorsque c'est pertinent. Le nom de la valeur de retour en cas d'erreur pour chaque fonction est systématiquement documenté dans la référence de la librairie. Il suit toujours la même logique: une méthode get_state() retournera une valeur Y_STATE_INVALID, une méthode get_currentValue retournera une valeur Y_CURRENTVALUE_INVALID, etc. Dans tous les cas, la valeur retournée sera du type attendu, et ne sera pas un pointeur nul qui risquerait de faire crasher votre programme. Au pire, si vous affichez la valeur sans la tester, elle sera hors du cadre attendu pour la valeur retournée. Dans le cas de fonctions qui ne retournent à priori pas d'information, la valeur de retour sera YAPI_SUCCESS si tout va bien, et un code d'erreur différent en cas d'échec.
Quand vous travaillez sans les exceptions, il est possible d'obtenir un code d'erreur et un message expliquant l'origine de l'erreur en le demandant à l'objet qui a retourné une erreur à l'aide des méthodes errType() et errMessage(). Ce sont les même informations qui auraient été associées à l'exception si elles avaient été actives.
15. Utilisation du Yocto-Color en Java
Java est un langage orienté objet développé par Sun Microsystem. Son principal avantage est la portabilité, mais cette portabilité a un coût. Java fait une telle abstraction des couches matérielles qu'il est très difficile d'interagir directement avec elles. C'est pourquoi l'API java standard de Yoctopuce ne fonctionne pas en natif: elle doit passer par l'intermédiaire d'un VirtualHub pour pouvoir communiquer avec les modules Yoctopuce.
15.1. Préparation
Connectez vous sur le site de Yoctopuce et téléchargez les éléments suivants:
- La librairie de programmation pour Java42
- Le programme VirtualHub43 pour Windows, Mac OS X ou Linux selon l'OS que vous utilisez
La librairie est disponible en fichier sources, mais elle aussi disponible sous la forme d'un fichier jar. Branchez vos modules, Décompressez les fichiers de la librairie dans un répertoire de votre choix. Lancez le programme VirtualHub, et vous pouvez commencer vos premiers test. Vous n'avez pas besoin d'installer de driver.
Afin de les garder simples, tous les exemples fournis dans cette documentation sont des applications consoles. Il va de soit que que le fonctionnement des librairies est strictement identiques si vous les intégrez dans une application dotée d'une interface graphique.
15.2. Contrôle de la fonction ColorLed
Il suffit de quelques lignes de code pour piloter un Yocto-Color. Voici le squelette d'un fragment de code Java qui utilise la fonction ColorLed.
[...]
// On récupère l'objet représentant le module (ici connecté en local sur USB)
YAPI.RegisterHub("127.0.0.1");
colorled = YColorLed.FindColorLed("YRGBLED1-123456.colorLed1");
// Pour gérer le hot-plug, on vérifie que le module est là
if (colorled.isOnline())
{
// Utiliser colorled.set_rgbColor()
[...]
}
[...]
Voyons maintenant en détail ce que font ces quelques lignes.
YAPI.RegisterHub
La fonction YAPI.RegisterHub initialise l'API de Yoctopuce en indiquant où les modules doivent être recherchés. Le paramètre est l'adresse du virtual hub capable de voir les modules. Si l'initialisation se passe mal, une exception sera générée.
YColorLed.FindColorLed
La fonction YColorLed.FindColorLed, permet de retrouver une LED RGB en fonction du numéro de série de son module hôte et de son nom de fonction. Mais vous pouvez tout aussi bien utiliser des noms logiques que vous auriez préalablement configurés. Imaginons un module Yocto-Color avec le numéros de série YRGBLED1-123456 que vous auriez appelé "MonModule" et dont vous auriez nommé la fonction colorLed1 "MaFonction", les cinq appels suivants seront strictement équivalents (pour autant que MaFonction ne soit définie qu'une fois, pour éviter toute ambiguïté):
colorled = YColorLed.FindColorLed("YRGBLED1-123456.colorLed1")
colorled = YColorLed.FindColorLed("YRGBLED1-123456.MaFonction")
colorled = YColorLed.FindColorLed("MonModule.colorLed1")
colorled = YColorLed.FindColorLed("MonModule.MaFonction")
colorled = YColorLed.FindColorLed("MaFonction")
YColorLed.FindColorLed renvoie un objet que vous pouvez ensuite utiliser à loisir pour contrôler la LED RGB.
isOnline
La méthode YColorLed.isOnline() de l'objet renvoyé par FindColorLed permet de savoir si le module correspondant est présent et en état de marche.
set_rgbColor
La méthode set_rgbColor() de l'objet renvoyé par YColorLed.FindColorLed permet de régler la couleur de la led correspondante. La Couleur est donnée en coordonnées RGB codées sous forme d'un entier.
rgbMove
Il existe une méthode alternative pour changer de couleur. La méthode rgbMove() de l'objet renvoyé par YColorLed.FindColorLed permet de lancer une transition entre la couleur courante et une autre couleur RGB donnée en paramètre. Cette fonction prend aussi en paramètre le temps accordé pour effecter la transition.
Les méthodes set_rgbColor() et rgbMove() existent aussi en version HSL. En guise d'exercice, vous pourriez modifier l'exemple ci'dessous pour utiliser le système HSL. Vous pourriez ainsi observer les différences de comportement. En HSL pour le rouge est codé 0xFFFF80, le vert est codé 0x55FF80 et du bleu est codé 0xA9FF80.
Un exemple réel
Lancez votre environnement java et ouvrez le projet correspondant, fourni dans le répertoire Examples/Doc-GettingStarted-Yocto-Color de la librairie Yoctopuce.
Vous reconnaîtrez dans cet exemple l'utilisation des fonctions expliquées ci-dessus, cette fois utilisées avec le décorum nécessaire à en faire un petit programme d'exemple concret.
public class Demo {
public static void main(String[] args) {
try {
// setup the API to use local VirtualHub
YAPI.RegisterHub("127.0.0.1");
} catch (YAPI_Exception ex) {
System.out.println("Cannot contact VirtualHub on 127.0.0.1 (" + ex.getLocalizedMessage() + ")");
System.out.println("Ensure that the VirtualHub application is running");
System.exit(1);
}
YColorLed led1,led2;
if (args.length > 0) {
led1 = YColorLed.FindColorLed(args[0] + ".colorLed1");
led2 = YColorLed.FindColorLed(args[0] + ".colorLed2");
} else {
led1 = YColorLed.FirstColorLed();
if (led1 == null) {
System.out.println("No module connected (check USB cable)");
System.exit(1);
}
led2 = led1.nextColorLed();
}
int all_colors[] = {0xff0000,0x00ff00,0x0000ff};
for(int color : all_colors) {
try {
System.out.println(String.format("Change color to 0x%06x", color));
led1.set_rgbColor(color);//led2.rgbMove(color, 1000); // smooth transition
led2.rgbMove(color, 1000); // smooth transition
YAPI.Sleep(1000);
} catch (YAPI_Exception ex) {
System.out.println("Module not connected (check identification and USB cable)");
break;
}
}
YAPI.FreeAPI();
}
}
15.3. Contrôle de la partie module
Chaque module peut-être contrôlé d'une manière similaire, vous trouverez ci-dessous un simple programme d'exemple affichant les principaux paramètres d'un module et permettant d'activer la balise de localisation.
import com.yoctopuce.YoctoAPI.*;
import java.util.logging.Level;
import java.util.logging.Logger;
public class Demo {
public static void main(String[] args)
{
try {
// setup the API to use local VirtualHub
YAPI.RegisterHub("127.0.0.1");
} catch (YAPI_Exception ex) {
System.out.println("Cannot contact VirtualHub on 127.0.0.1 (" + ex.getLocalizedMessage() + ")");
System.out.println("Ensure that the VirtualHub application is running");
System.exit(1);
}
System.out.println("usage: demo [serial or logical name] [ON/OFF]");
YModule module;
if (args.length == 0) {
module = YModule.FirstModule();
if (module == null) {
System.out.println("No module connected (check USB cable)");
System.exit(1);
}
} else {
module = YModule.FindModule(args[0]); // use serial or logical name
}
try {
if (args.length > 1) {
if (args[1].equalsIgnoreCase("ON")) {
module.setBeacon(YModule.BEACON_ON);
} else {
module.setBeacon(YModule.BEACON_OFF);
}
}
System.out.println("serial: " + module.get_serialNumber());
System.out.println("logical name: " + module.get_logicalName());
System.out.println("luminosity: " + module.get_luminosity());
if (module.get_beacon() == YModule.BEACON_ON) {
System.out.println("beacon: ON");
} else {
System.out.println("beacon: OFF");
}
System.out.println("upTime: " + module.get_upTime() / 1000 + " sec");
System.out.println("USB current: " + module.get_usbCurrent() + " mA");
System.out.println("logs:\n" + module.get_lastLogs());
} catch (YAPI_Exception ex) {
System.out.println(args[1] + " not connected (check identification and USB cable)");
}
YAPI.FreeAPI();
}
}
Chaque propriété xxx du module peut être lue grâce à une méthode du type YModule.get_xxxx(), et les propriétés qui se sont pas en lecture seule peuvent être modifiées à l'aide de la méthode YModule.set_xxx() Pour plus de détails concernant ces fonctions utilisées, reportez-vous aux chapitre API
Modifications des réglages du module
Lorsque que vous souhaitez modifier les réglages d'un module, il suffit d'appeler la fonction YModule.set_xxx() correspondante, cependant cette modification n'a lieu que dans la mémoire vive du module: si le module redémarre, les modifications seront perdues. Pour qu'elle soient mémorisées de manière persistante, il est nécessaire de demander au module de sauvegarder sa configuration courante dans sa mémoire non volatile. Pour cela il faut utiliser la méthode YModule.saveToFlash(). Inversement il est possible de forcer le module à oublier ses réglages courants en utilisant la méthode YModule.revertFromFlash(). Ce petit exemple ci-dessous vous permet changer le nom logique d'un module.
public class Demo {
public static void main(String[] args)
{
try {
// setup the API to use local VirtualHub
YAPI.RegisterHub("127.0.0.1");
} catch (YAPI_Exception ex) {
System.out.println("Cannot contact VirtualHub on 127.0.0.1 (" + ex.getLocalizedMessage() + ")");
System.out.println("Ensure that the VirtualHub application is running");
System.exit(1);
}
if (args.length != 2) {
System.out.println("usage: demo <serial or logical name> <new logical name>");
System.exit(1);
}
YModule m;
String newname;
m = YModule.FindModule(args[0]); // use serial or logical name
try {
newname = args[1];
if (!YAPI.CheckLogicalName(newname))
{
System.out.println("Invalid name (" + newname + ")");
System.exit(1);
}
m.set_logicalName(newname);
m.saveToFlash(); // do not forget this
System.out.println("Module: serial= " + m.get_serialNumber());
System.out.println(" / name= " + m.get_logicalName());
} catch (YAPI_Exception ex) {
System.out.println("Module " + args[0] + "not connected (check identification and USB cable)");
System.out.println(ex.getMessage());
System.exit(1);
}
YAPI.FreeAPI();
}
}
Attention, le nombre de cycles d'écriture de la mémoire non volatile du module est limité. Passé cette limite plus rien ne garantit que la sauvegarde des réglages se passera correctement. Cette limite, liée à la technologie employée par le micro-processeur du module se situe aux alentour de 100000 cycles. Pour résumer vous ne pouvez employer la fonction YModule.saveToFlash() que 100000 fois au cours de la vie du module. Veillez donc à ne pas appeler cette fonction depuis l'intérieur d'une boucle.
Enumeration des modules
Obtenir la liste des modules connectés se fait à l'aide de la fonction YModule.yFirstModule() qui renvoie le premier module trouvé, il suffit ensuite d'appeler la mehode nextModule() de cet objet pour trouver les modules suivants, et ce tant que la réponse n'est pas un null. Ci-dessous un petit exemple listant les module connectés
public class Demo {
public static void main(String[] args)
{
try {
// setup the API to use local VirtualHub
YAPI.RegisterHub("127.0.0.1");
} catch (YAPI_Exception ex) {
System.out.println("Cannot contact VirtualHub on 127.0.0.1 (" + ex.getLocalizedMessage() + ")");
System.out.println("Ensure that the VirtualHub application is running");
System.exit(1);
}
System.out.println("Device list");
YModule module = YModule.FirstModule();
while (module != null) {
try {
System.out.println(module.get_serialNumber() + " (" + module.get_productName() + ")");
} catch (YAPI_Exception ex) {
break;
}
module = module.nextModule();
}
YAPI.FreeAPI();
}
}
15.4. Gestion des erreurs
Lorsque vous implémentez un programme qui doit interagir avec des modules USB, vous ne pouvez pas faire abstraction de la gestion des erreurs. Il y aura forcément une occasion où un utilisateur aura débranché le périphérique, soit avant de lancer le programme, soit même en pleine opération. La librairie Yoctopuce est prévue pour vous aider à supporter ce genre de comportements, mais votre code doit néanmoins être fait pour se comporter au mieux pour interpréter les erreurs signalées par la librairie.
La manière la plus simple de contourner le problème est celle que nous avons employé pour les petits exemples précédents de ce chapitre: avant d'accéder à un module, on vérifie qu'il est en ligne avec la méthode isOnline() et on suppose ensuite qu'il va y rester pendant la fraction de seconde nécessaire à exécuter les lignes de code suivantes. Ce n'est pas parfait, mais ça peut suffire dans certains cas. Il faut toutefois être conscient qu'on ne peut pas totalement exclure une erreur se produisant après le isOnline(), qui pourrait faire planter le programme.
Dans l'API java, le traitement d'erreur est implémenté au moyen d'exceptions. Vous devrez donc intercepter et traiter correctement ces exceptions si vous souhaitez avoir un projet fiable qui ne crashera pas des que vous débrancherez un module.
16. Utilisation du Yocto-Color avec Android
A vrai dire, Android n'est pas un langage de programmation, c'est un système d'exploitation développé par Google pour les appareils portables tels que smart phones et tablettes. Mais il se trouve que sous Android tout est programmé avec le même langage de programmation: Java. En revanche les paradigmes de programmation et les possibilités d'accès au hardware sont légèrement différentes par rapport au Java classique, ce qui justifie un chapitre à part sur la programmation Android.
16.1. Accès Natif et Virtual Hub.
Contrairement à l'API Java classique, l'API Java pour Android accède aux modules USB de manière native. En revanche, comme il n'existe pas de VirtualHub tournant sous Android, il n'est pas possible de prendre le contrôle à distance de modules Yoctopuce pilotés par une machine sous Android. Bien sûr, l'API Java pour Android reste parfaitement capable de se connecter à un VirtualHub tournant sur un autre OS.
16.2. Préparation
Connectez-vous sur le site de Yoctopuce et téléchargez la librairie de programmation pour Java pour Android44. La librairie est disponible en fichiers sources, mais elle aussi disponible sous la forme d'un fichier jar. Branchez vos modules, décompressez les fichiers de la librairie dans le répertoire de votre choix. Et configurez votre environnement de programmation Android pour qu'il puisse les trouver.
Afin de les garder simples, tous les exemples fournis dans cette documentation sont des fragments d'application Android. Vous devrez les intégrer dans vos propres applications Android pour les faire fonctionner. En revanche vous pourrez trouver des applications complètes dans les exemples fournis avec la librairie Java pour Android.
16.3. Compatibilité
Dans un monde idéal, il suffirait d'avoir un téléphone sous Android pour pouvoir faire fonctionner des modules Yoctopuce. Malheureusement, la réalité est légèrement différente, un appareil tournant sous Android doit répondre à un certain nombre d'exigences pour pouvoir faire fonctionner des modules USB Yoctopuce en natif.
Android 4.x
Android 4.0 (api 14) et suivants sont officiellement supportés. Théoriquement le support USB host fonctionne depuis Android 3.1. Mais sachez que Yoctopuce ne teste régulièrement l'API Java pour Android qu'à partir de Android 4.
Support USB host
Il faut bien sûr que votre machine dispose non seulement d'un port USB, mais il faut aussi que ce port soit capable de tourner en mode host. En mode host, la machine prend littéralement le contrôle des périphériques qui lui sont raccordés. Les ports USB d'un ordinateur bureau, par exemple, fonctionnent mode host. Le pendant du mode host est le mode device. Les clefs USB par exemple fonctionnent en mode device: elles ne peuvent qu'être contrôlées par un host. Certains ports USB sont capables de fonctionner dans les deux modes, ils s'agit de ports OTG (On The Go). Il se trouve que beaucoup d'appareils portables ne fonctionnent qu'en mode "device": ils sont conçus pour être branchés à chargeur ou un ordinateur de bureau, rien de plus. Il est donc fortement recommandé de lire attentivement les spécifications techniques d'un produit fonctionnant sous Android avant d'espérer le voir fonctionner avec des modules Yoctopuce.
Disposer d'une version correcte d'Android et de ports USB fonctionnant en mode host ne suffit malheureusement pas pour garantir un bon fonctionnement avec des modules Yoctopuce sous Android. En effet certains constructeurs configurent leur image Android afin que les périphériques autres que clavier et mass storage soit ignorés, et cette configuration est difficilement détectable. En l'état actuel des choses, le meilleur moyen de savoir avec certitude si un matériel Android spécifique fonctionne avec les modules Yoctopuce consiste à essayer.
Matériel supporté
La librairie est testée et validée sur les machines suivantes:
- Samsung Galaxy S3
- Samsung Galaxy Note 2
- Google Nexus 5
- Google Nexus 7
- Acer Iconia Tab A200
- Asus Tranformer Pad TF300T
- Kurio 7
Si votre machine Android n'est pas capable de faire fonctionner nativement des modules Yoctopuce, il vous reste tout de même la possibilité de contrôler à distance des modules pilotés par un VirtualHub sur un autre OS ou un YoctoHub45.
16.4. Activer le port USB sous Android
Par défaut Android n’autorise pas une application à accéder aux périphériques connectés au port USB. Pour que votre application puisse interagir avec un module Yoctopuce branché directement sur votre tablette sur un port USB quelques étapes supplémentaires sont nécessaires. Si vous comptez uniquement interagir avec des modules connectés sur une autre machine par IP, vous pouvez ignorer cette section.
Il faut déclarer dans son AndroidManifest.xml l'utilisation de la fonctionnalité "USB Host" en ajoutant le tag <uses-feature android:name="android.hardware.usb.host" /> dans la section manifest.
<manifest ...>
...
<uses-feature android:name="android.hardware.usb.host" />;
...
</manifest>
Lors du premier accès à un module Yoctopuce, Android va ouvrir une fenêtre pour informer l'utilisateur que l'application va accéder module connecté. L'utilisateur peut refuser ou autoriser l’accès au périphérique. Si l'utilisateur accepte, l'application pourra accéder au périphérique connecté jusqu'à la prochaine déconnexion du périphérique. Pour que la librairie Yoctopuce puisse gérer correctement ces autorisations, il faut lui fournir un pointeur sur le contexte de l'application en appelant la méthode EnableUSBHost de la classe YAPI avant le premier accès USB. Cette fonction prend en argument un objet de la classe android.content.Context (ou d'une sous-classe). Comme la classe Activity est une sous-classe de Context, le plus simple est de d'appeler YAPI.EnableUSBHost(this); dans la méthode onCreate de votre application. Si l'objet passé en paramètre n'est pas du bon type, une exception YAPI_Exception sera générée.
...
@Override
public void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
try {
// Pass the application Context to the Yoctopuce Library
YAPI.EnableUSBHost(this);
} catch (YAPI_Exception e) {
Log.e("Yocto",e.getLocalizedMessage());
}
}
...
Lancement automatique
Il est possible d'enregistrer son application comme application par défaut pour un module USB, dans ce cas des qu'un module sera connecté au système, l'application sera lancée automatiquement. Il faut ajouter <action android:name="android.hardware.usb.action.USB_DEVICE_ATTACHED"/> dans la section <intent-filter> de l'activité principale. La section <activity> doit contenir un pointeur sur un fichier xml qui contient la liste des modules USB qui peuvent lancer l'application.
<manifest xmlns:android="http://schemas.android.com/apk/res/android"
...
<uses-feature android:name="android.hardware.usb.host" />
...
<application ... >
<activity
android:name=".MainActivity" >
<intent-filter>
<action android:name="android.intent.action.MAIN" />
<action android:name="android.hardware.usb.action.USB_DEVICE_ATTACHED" />
<category android:name="android.intent.category.LAUNCHER" />
</intent-filter>
<meta-data
android:name="android.hardware.usb.action.USB_DEVICE_ATTACHED"
android:resource="@xml/device_filter" />
</activity>
</application>
</manifest>
Le fichier XML qui contient la liste des modules qui peuvent lancer l'application doit être sauvé dans le répertoire res/xml. Ce fichier contient une liste de vendorId et deviceID USB en décimal. L'exemple suivant lance l'application dès qu'un Yocto-Relay ou un Yocto-PowerRelay est connecté. Vous pouvez trouver le vendorId et deviceId des modules Yoctopuce dans la section caractéristiques de la documentation.
<?xml version="1.0" encoding="utf-8"?>
<resources>
<usb-device vendor-id="9440" product-id="12" />
<usb-device vendor-id="9440" product-id="13" />
</resources>
16.5. Contrôle de la fonction ColorLed
Il suffit de quelques lignes de code pour piloter un Yocto-Color. Voici le squelette d'un fragment de code Java qui utilise la fonction ColorLed.
[...]
// On récupère l'objet représentant le module (ici connecté en local sur USB)
YAPI.EnableUSBHost(this);
YAPI.RegisterHub("usb");
colorled = YColorLed.FindColorLed("YRGBLED1-123456.colorLed1");
//Pour gérer le hot-plug, on vérifie que le module est là
if (colorled.isOnline())
{ //Use colorled.set_rgbColor()
...
}
[...]
Voyons maintenant en détail ce que font ces quelques lignes.
YAPI.EnableUSBHost
La fonction YAPI.EnableUSBHost initialise l'API avec le Context de l'application courante. Cette fonction prend en argument un objet de la classe android.content.Context (ou d'une sous-classe). Si vous comptez uniquement vous connecter à d'autres machines par IP vous cette fonction est factultative.
YAPI.RegisterHub
La fonction YAPI.RegisterHub initialise l'API de Yoctopuce en indiquant où les modules doivent être recherchés. Le paramètre est l'adresse du virtual hub capable de voir les modules. Si l'on passe la chaine de caractère "usb", l'API va travailler avec les modules connectés localement à la machine. Si l'initialisation se passe mal, une exception sera générée.
YColorLed.FindColorLed
La fonction YColorLed.FindColorLed permet de retrouver une LED RGB en fonction du numéro de série de son module hôte et de son nom de fonction. Mais vous pouvez tout aussi bien utiliser des noms logiques que vous auriez préalablement configurés. Imaginons un module Yocto-Color avec le numéros de série YRGBLED1-123456 que vous auriez appelé "MonModule" et dont vous auriez nommé la fonction colorLed1 "MaFonction", les cinq appels suivants seront strictement équivalents (pour autant que MaFonction ne soit définie qu'une fois, pour éviter toute ambiguïté):
colorled = YColorLed.FindColorLed("YRGBLED1-123456.colorLed1")
colorled = YColorLed.FindColorLed("YRGBLED1-123456.MaFonction")
colorled = YColorLed.FindColorLed("MonModule.colorLed1")
colorled = YColorLed.FindColorLed("MonModule.MaFonction")
colorled = YColorLed.FindColorLed("MaFonction")
YColorLed.FindColorLed renvoie un objet que vous pouvez ensuite utiliser à loisir pour contrôler la LED RGB.
isOnline
La méthode YColorLed.isOnline() de l'objet renvoyé par FindColorLed permet de savoir si le module correspondant est présent et en état de marche.
set_rgbColor
La méthode set_rgbColor() de l'objet renvoyé par YColorLed.FindColorLed permet de régler la couleur de la led correspondante. La Couleur est donnée en coordonnées RGB codées sous forme d'un entier.
rgbMove
Il existe une méthode alternative pour changer de couleur. La méthode rgbMove() de l'objet renvoyé par YColorLed.FindColorLed permet de lancer une transition entre la couleur courante et une autre couleur RGB donnée en paramètre. Cette fonction prend aussi en paramètre le temps accordé pour effecter la transition.
Les méthodes set_rgbColor() et rgbMove() existent aussi en version HSL. En guise d'exercice, vous pourriez modifier l'exemple ci'dessous pour utiliser le système HSL. Vous pourriez ainsi observer les différences de comportement. En HSL pour le rouge est codé 0xFFFF80, le vert est codé 0x55FF80 et du bleu est codé 0xA9FF80.
Un exemple réel
Lancez votre environnement java et ouvrez le projet correspondant, fourni dans le répertoire Examples/Doc-Examples de la librairie Yoctopuce.
Vous reconnaîtrez dans cet exemple l'utilisation des fonctions expliquées ci-dessus, cette fois utilisées avec le décorum nécessaire à en faire un petit programme d'exemple concret.
import android.app.Activity;
import android.os.Bundle;
import android.view.View;
import android.widget.AdapterView;
import android.widget.AdapterView.OnItemSelectedListener;
import android.widget.ArrayAdapter;
import android.widget.SeekBar;
import android.widget.Spinner;
import com.yoctopuce.YoctoAPI.YAPI;
import com.yoctopuce.YoctoAPI.YAPI_Exception;
import com.yoctopuce.YoctoAPI.YColorLed;
public class GettingStarted_Yocto_Color extends Activity implements OnItemSelectedListener
{
private YColorLed color = null;
private ArrayAdapter<String> aa;
@Override
public void onCreate(Bundle savedInstanceState)
{
super.onCreate(savedInstanceState);
setContentView(R.layout.gettingstarted_yocto_color);
Spinner my_spin = (Spinner) findViewById(R.id.spinner1);
my_spin.setOnItemSelectedListener(this);
aa = new ArrayAdapter<String>(this, android.R.layout.simple_spinner_item);
aa.setDropDownViewResource(android.R.layout.simple_spinner_dropdown_item);
my_spin.setAdapter(aa);
}
@Override
protected void onStart()
{
super.onStart();
aa.clear();
try {
YAPI.EnableUSBHost(this);
YAPI.RegisterHub("usb");
YAPI.UpdateDeviceList();
YColorLed c = YColorLed.FirstColorLed();
while (c != null) {
String hwid = c.get_hardwareId();
aa.add(hwid);
c = c.nextColorLed();
}
} catch (YAPI_Exception e) {
e.printStackTrace();
}
aa.notifyDataSetChanged();
}
@Override
protected void onStop()
{
super.onStop();
YAPI.FreeAPI();
}
@Override
public void onItemSelected(AdapterView<?> parent, View view, int pos, long id)
{
String hwid = parent.getItemAtPosition(pos).toString();
color = YColorLed.FindColorLed(hwid);
}
@Override
public void onNothingSelected(AdapterView<?> arg0)
{
}
/** Called when the user touches the button State A */
public void updateColor(View view)
{
if (color == null)
return;
SeekBar red_bar = (SeekBar) findViewById(R.id.seekBarRed);
int red = red_bar.getProgress() * 255 / red_bar.getMax();
SeekBar green_bar = (SeekBar) findViewById(R.id.seekBarGreen);
int green = green_bar.getProgress() * 255 / green_bar.getMax();
SeekBar blue_bar = (SeekBar) findViewById(R.id.seekBarBlue);
int blue = blue_bar.getProgress() * 255 / blue_bar.getMax();
int newcolor = (red << 16) + (green << 8) + blue;
switch (view.getId()) {
case R.id.moveColorButton:
try {
color.rgbMove(newcolor, 1000);
} catch (YAPI_Exception e) {
e.printStackTrace();
}
break;
case R.id.setColorButton:
try {
color.set_rgbColor(newcolor);
} catch (YAPI_Exception e) {
e.printStackTrace();
}
break;
}
}
}
16.6. Contrôle de la partie module
Chaque module peut-être contrôlé d'une manière similaire, vous trouverez ci-dessous un simple programme d'exemple affichant les principaux paramètres d'un module et permettant d'activer la balise de localisation.
import android.app.Activity;
import android.os.Bundle;
import android.view.View;
import android.widget.AdapterView;
import android.widget.AdapterView.OnItemSelectedListener;
import android.widget.ArrayAdapter;
import android.widget.Spinner;
import android.widget.Switch;
import android.widget.TextView;
import com.yoctopuce.YoctoAPI.YAPI;
import com.yoctopuce.YoctoAPI.YAPI_Exception;
import com.yoctopuce.YoctoAPI.YModule;
public class ModuleControl extends Activity implements OnItemSelectedListener
{
private ArrayAdapter<String> aa;
private YModule module = null;
@Override
public void onCreate(Bundle savedInstanceState)
{
super.onCreate(savedInstanceState);
setContentView(R.layout.modulecontrol);
Spinner my_spin = (Spinner) findViewById(R.id.spinner1);
my_spin.setOnItemSelectedListener(this);
aa = new ArrayAdapter<String>(this, android.R.layout.simple_spinner_item);
aa.setDropDownViewResource(android.R.layout.simple_spinner_dropdown_item);
my_spin.setAdapter(aa);
}
@Override
protected void onStart()
{
super.onStart();
try {
aa.clear();
YAPI.EnableUSBHost(this);
YAPI.RegisterHub("usb");
YModule r = YModule.FirstModule();
while (r != null) {
String hwid = r.get_hardwareId();
aa.add(hwid);
r = r.nextModule();
}
} catch (YAPI_Exception e) {
e.printStackTrace();
}
// refresh Spinner with detected relay
aa.notifyDataSetChanged();
}
@Override
protected void onStop()
{
super.onStop();
YAPI.FreeAPI();
}
private void DisplayModuleInfo()
{
TextView field;
if (module == null)
return;
try {
field = (TextView) findViewById(R.id.serialfield);
field.setText(module.getSerialNumber());
field = (TextView) findViewById(R.id.logicalnamefield);
field.setText(module.getLogicalName());
field = (TextView) findViewById(R.id.luminosityfield);
field.setText(String.format("%d%%", module.getLuminosity()));
field = (TextView) findViewById(R.id.uptimefield);
field.setText(module.getUpTime() / 1000 + " sec");
field = (TextView) findViewById(R.id.usbcurrentfield);
field.setText(module.getUsbCurrent() + " mA");
Switch sw = (Switch) findViewById(R.id.beaconswitch);
sw.setChecked(module.getBeacon() == YModule.BEACON_ON);
field = (TextView) findViewById(R.id.logs);
field.setText(module.get_lastLogs());
} catch (YAPI_Exception e) {
e.printStackTrace();
}
}
@Override
public void onItemSelected(AdapterView<?> parent, View view, int pos, long id)
{
String hwid = parent.getItemAtPosition(pos).toString();
module = YModule.FindModule(hwid);
DisplayModuleInfo();
}
@Override
public void onNothingSelected(AdapterView<?> arg0)
{
}
public void refreshInfo(View view)
{
DisplayModuleInfo();
}
public void toggleBeacon(View view)
{
if (module == null)
return;
boolean on = ((Switch) view).isChecked();
try {
if (on) {
module.setBeacon(YModule.BEACON_ON);
} else {
module.setBeacon(YModule.BEACON_OFF);
}
} catch (YAPI_Exception e) {
e.printStackTrace();
}
}
}
Chaque propriété xxx du module peut être lue grâce à une méthode du type YModule.get_xxxx(), et les propriétés qui se sont pas en lecture seule peuvent être modifiées à l'aide de la méthode YModule.set_xxx() Pour plus de détails concernant ces fonctions utilisées, reportez-vous aux chapitre API
Modifications des réglages du module
Lorsque que vous souhaitez modifier les réglages d'un module, il suffit d'appeler la fonction YModule.set_xxx() correspondante, cependant cette modification n'a lieu que dans la mémoire vive du module: si le module redémarre, les modifications seront perdues. Pour qu'elle soient mémorisées de manière persistante, il est nécessaire de demander au module de sauvegarder sa configuration courante dans sa mémoire non volatile. Pour cela il faut utiliser la méthode YModule.saveToFlash(). Inversement il est possible de forcer le module à oublier ses réglages courants en utilisant la méthode YModule.revertFromFlash(). Ce petit exemple ci-dessous vous permet changer le nom logique d'un module.
import android.app.Activity;
import android.os.Bundle;
import android.view.View;
import android.widget.AdapterView;
import android.widget.AdapterView.OnItemSelectedListener;
import android.widget.ArrayAdapter;
import android.widget.EditText;
import android.widget.Spinner;
import android.widget.TextView;
import android.widget.Toast;
import com.yoctopuce.YoctoAPI.YAPI;
import com.yoctopuce.YoctoAPI.YAPI_Exception;
import com.yoctopuce.YoctoAPI.YModule;
public class SaveSettings extends Activity implements OnItemSelectedListener
{
private ArrayAdapter<String> aa;
private YModule module = null;
@Override
public void onCreate(Bundle savedInstanceState)
{
super.onCreate(savedInstanceState);
setContentView(R.layout.savesettings);
Spinner my_spin = (Spinner) findViewById(R.id.spinner1);
my_spin.setOnItemSelectedListener(this);
aa = new ArrayAdapter<String>(this, android.R.layout.simple_spinner_item);
aa.setDropDownViewResource(android.R.layout.simple_spinner_dropdown_item);
my_spin.setAdapter(aa);
}
@Override
protected void onStart()
{
super.onStart();
try {
aa.clear();
YAPI.EnableUSBHost(this);
YAPI.RegisterHub("usb");
YModule r = YModule.FirstModule();
while (r != null) {
String hwid = r.get_hardwareId();
aa.add(hwid);
r = r.nextModule();
}
} catch (YAPI_Exception e) {
e.printStackTrace();
}
// refresh Spinner with detected relay
aa.notifyDataSetChanged();
}
@Override
protected void onStop()
{
super.onStop();
YAPI.FreeAPI();
}
private void DisplayModuleInfo()
{
TextView field;
if (module == null)
return;
try {
YAPI.UpdateDeviceList();// fixme
field = (TextView) findViewById(R.id.logicalnamefield);
field.setText(module.getLogicalName());
} catch (YAPI_Exception e) {
e.printStackTrace();
}
}
@Override
public void onItemSelected(AdapterView<?> parent, View view, int pos, long id)
{
String hwid = parent.getItemAtPosition(pos).toString();
module = YModule.FindModule(hwid);
DisplayModuleInfo();
}
@Override
public void onNothingSelected(AdapterView<?> arg0)
{
}
public void saveName(View view)
{
if (module == null)
return;
EditText edit = (EditText) findViewById(R.id.newname);
String newname = edit.getText().toString();
try {
if (!YAPI.CheckLogicalName(newname)) {
Toast.makeText(getApplicationContext(), "Invalid name (" + newname + ")", Toast.LENGTH_LONG).show();
return;
}
module.set_logicalName(newname);
module.saveToFlash(); // do not forget this
edit.setText("");
} catch (YAPI_Exception ex) {
ex.printStackTrace();
}
DisplayModuleInfo();
}
}
Attention, le nombre de cycles d'écriture de la mémoire non volatile du module est limité. Passé cette limite plus rien ne garantit que la sauvegarde des réglages se passera correctement. Cette limite, liée à la technologie employée par le micro-processeur du module se situe aux alentour de 100000 cycles. Pour résumer vous ne pouvez employer la fonction YModule.saveToFlash() que 100000 fois au cours de la vie du module. Veillez donc à ne pas appeler cette fonction depuis l'intérieur d'une boucle.
Enumeration des modules
Obtenir la liste des modules connectés se fait à l'aide de la fonction YModule.yFirstModule() qui renvoie le premier module trouvé, il suffit ensuite d'appeler la mehode nextModule() de cet objet pour trouver les modules suivants, et ce tant que la réponse n'est pas un null. Ci-dessous un petit exemple listant les module connectés
import android.app.Activity;
import android.os.Bundle;
import android.util.TypedValue;
import android.view.View;
import android.widget.LinearLayout;
import android.widget.TextView;
import com.yoctopuce.YoctoAPI.YAPI;
import com.yoctopuce.YoctoAPI.YAPI_Exception;
import com.yoctopuce.YoctoAPI.YModule;
public class Inventory extends Activity
{
@Override
public void onCreate(Bundle savedInstanceState)
{
super.onCreate(savedInstanceState);
setContentView(R.layout.inventory);
}
public void refreshInventory(View view)
{
LinearLayout layout = (LinearLayout) findViewById(R.id.inventoryList);
layout.removeAllViews();
try {
YAPI.UpdateDeviceList();
YModule module = YModule.FirstModule();
while (module != null) {
String line = module.get_serialNumber() + " (" + module.get_productName() + ")";
TextView tx = new TextView(this);
tx.setText(line);
tx.setTextSize(TypedValue.COMPLEX_UNIT_SP, 20);
layout.addView(tx);
module = module.nextModule();
}
} catch (YAPI_Exception e) {
e.printStackTrace();
}
}
@Override
protected void onStart()
{
super.onStart();
try {
YAPI.EnableUSBHost(this);
YAPI.RegisterHub("usb");
} catch (YAPI_Exception e) {
e.printStackTrace();
}
refreshInventory(null);
}
@Override
protected void onStop()
{
super.onStop();
YAPI.FreeAPI();
}
}
16.7. Gestion des erreurs
Lorsque vous implémentez un programme qui doit interagir avec des modules USB, vous ne pouvez pas faire abstraction de la gestion des erreurs. Il y aura forcément une occasion où un utilisateur aura débranché le périphérique, soit avant de lancer le programme, soit même en pleine opération. La librairie Yoctopuce est prévue pour vous aider à supporter ce genre de comportements, mais votre code doit néanmoins être fait pour se comporter au mieux pour interpréter les erreurs signalées par la librairie.
La manière la plus simple de contourner le problème est celle que nous avons employé pour les petits exemples précédents de ce chapitre: avant d'accéder à un module, on vérifie qu'il est en ligne avec la méthode isOnline() et on suppose ensuite qu'il va y rester pendant la fraction de seconde nécessaire à exécuter les lignes de code suivantes. Ce n'est pas parfait, mais ça peut suffire dans certains cas. Il faut toutefois être conscient qu'on ne peut pas totalement exclure une erreur se produisant après le isOnline(), qui pourrait faire planter le programme.
Dans l'API java pour Android, le traitement d'erreur est implémenté au moyen d'exceptions. Vous devrez donc intercepter et traiter correctement ces exceptions si vous souhaitez avoir un projet fiable qui ne crashera pas des que vous débrancherez un module.
17. Programmation avancée
Les chapitres précédents vous ont présenté dans chaque language disponible les fonctions de programmation de base utilisables avec votre module Yocto-Color. Ce chapitre présente de façon plus générale une utilisation plus avancée de votre module. Les exemples sont donnés dans le language le plus populaire auprès des clients de Yoctopuce, à savoir C#. Néanmoins, vous trouverez dans les librairies de programmation pour chaque language des exemples complets illustrant les concepts présentés ici.
Afin de rester le plus concis possible, les exemples donnés dans ce chapitre ne font aucune gestion d'erreur. Ne les copiez pas tels-quels dans une application de production.
17.1. Programmation par événements
Les méthodes de gestion des modules Yoctopuce qui vous ont été présentées dans les chapitres précédents sont des fonctions de polling, qui consistent à demander en permanence à l'API si quelque chose a changé. Facile à appréhender, cette technique de programmation est n'est pas la plus efficace ni la plus réactive. C'est pourquoi l'API de programmation Yoctopuce propose aussi un modèle de programmation par événements. Cette technique consiste à demander à l'API de signaler elle-même les changements importants dès qu'ils sont détectés. A chaque fois qu'un paramètre clé change, l'API appelle une fonction de callback que vous avez prédéfinie.
Détecter l'arrivée et le départ des modules
La gestion du hot-plug est importante lorsque l'on travaille avec des modules USB, car tôt ou tard vous serez amené à brancher et débrancher un module après le lancement de votre programme. L'API a été conçue pour gérer l'arrivée et le départ inopinés des modules de manière transparente, mais votre application doit en général en tenir compte si elle veut éviter de prétendre utiliser un module qui a été débranché.
La programmation par événements est particulièrement utile pour détecter les branchements/débranchements de modules. Il est en effet plus simple de se faire signaler les branchements, que de devoir lister en permanence les modules branchés pour en déduire ceux qui sont arrivés et ceux qui sont partis. Pour pouvoir être prévenu dès qu'un module arrive, vous avez besoin de trois morceaux de code.
Le callback
Le callback est la fonction qui sera appelée à chaque fois qu'un nouveau module Yoctopuce sera branché. Elle prend en paramètre le module concerné.
static void deviceArrival(YModule m)
{
Console.WriteLine("Nouveau module : " + m.get_serialNumber());
}
L'initialisation
Vous devez ensuite signaler à l'API qu'il faut appeler votre callback quand un nouveau module est branché.
YAPI.RegisterDeviceArrivalCallback(deviceArrival);
Notez que si des modules sont déjà branchés lorsque le callback est enregistré, le callback sera appelé pour chacun de ces modules déjà branchés.
Déclenchement des callbacks
Un problème classique de la programmation par callbacks est que ces callbacks peuvent être appelés n'importe quand, y compris à des moments où le programme principal n'est pas prêt à les recevoir, ce qui peut avoir des effets de bords indésirables comme des dead-locks et autres conditions de course. C'est pourquoi dans l'API Yoctopuce, les callbacks d'arrivée/départs de modules ne sont appelés que pendant l'exécution de la fonction UpdateDeviceList(). Il vous suffit d'appeler UpdateDeviceList() à intervalle régulier depuis un timer ou un thread spécifique pour controller précisément quand les appels à ces callbacks auront lieu:
// boucle d'attente gérant les callback
while (true)
{
// callback d'arrivée / départ de modules
YAPI.UpdateDeviceList(ref errmsg);
// attente non active gérant les autres callbacks
YAPI.Sleep(500, ref errmsg);
}
De manière similaire, il est possible d'avoir un callback quand un module est débranché. Vous trouverez un exemple concret démontrant toutes ces techniques dans la librairie de programmation Yoctopuce de chaque langage. L'exemple se trouve dans le répertoire Examples/Prog-EventBased.
Attention: dans la plupart des langages, les callbacks doivent être des procédures globales, et non pas des méthodes. Si vous souhaitez que le callback appelle une méthode d'un objet, définissez votre callback sous la forme d'une procédure globale qui ensuite appellera votre méthode.
18. Mise à jour du firmware
Il existe plusieurs moyens de mettre à jour le firmware des modules Yoctopuce.18.1. Le VirtualHub ou le YoctoHub
Il est possible de mettre à jour un module directement depuis l'interface web du VirutalHub ou du YoctoHub. Il suffit d'accéder à la fenêtre de configuration du module que à mettre à jour et de cliquer sur le bouton "upgrade". Le VirtualHub démarre un assistant qui vous guidera durant la procédure de mise à jour.
Si pour une raison ou une autre, la mise à jour venait à échouer et que le module de fonctionnait plus, débranchez puis rebranchez le module en maintenant sur le Yocto-bouton appuyé. Le module va démarrer en mode "mise à jour" et sera listé en dessous des modules connectés.
18.2. La librairie ligne de commandes
Tous les outils en lignes de commandes ont la possibilité de mettre à jour les modules Yoctopuce grâce à la commande downloadAndUpdate. Le mécanisme de sélection des modules fonctionne comme pour une commande traditionnelle. La [cible] est le nom du module qui va être mis à jour. Vous pouvez aussi utiliser les alias "any" ou "all", ou encore une liste de noms, séparés par des virgules, sans espace.
C:\>Executable [options] [cible] commande [paramètres]
L'exemple suivant met à jour tous les modules Yoctopuce connectés en USB.
C:\>YModule all downloadAndUpdate
ok: Yocto-PowerRelay RELAYHI1-266C8(rev=15430) is up to date.
ok: 0 / 0 hubs in 0.000000s.
ok: 0 / 0 shields in 0.000000s.
ok: 1 / 1 devices in 0.130000s 0.130000s per device.
ok: All devices are now up to date.
C:\>
18.3. L'application Android Yocto-Firmware
Il est possible de mettre à jour le firmware de vos modules depuis votre téléphone ou tablette Android avec l'application Yocto-Firmware. Cette application liste tous les modules Yoctopuce branchés en USB et vérifie si un firmware plus récent est disponible sur www.yoctopuce.com. Si un firmware plus récent est disponible, il est possible de mettre à jour le module. L'application se charge de télécharger et d'installer le nouveau firmware en préservant les paramètres du module.
Attention, pendant la mise à jour du firmware, le module redémarre plusieurs fois. Android interprète le reboot d'un périphérique USB comme une déconnexion et reconnexion du périphérique USB, et demande à nouveau l'autorisation d'utiliser le port USB. L'utilisateur est obligé de cliquer sur OK pour que la procédure de mise à jour se termine correctement.
18.4. La librairie de programmation
Si vous avez besoin d'intégrer la mise à jour de firmware dans votre application, les librairies proposent une API pour mettre à jour vos modules.46
Sauvegarder et restaurer les paramètres
La méthode get_allSettings() retourne un buffer binaire qui permet de sauvegarder les paramètres persistants d'un module. Cette fonction est très utile pour sauvegarder la configuration réseau d'un YoctoHub par exemple.
YWireless wireless = YWireless.FindWireless("reference");
YModule m = wireless.get_module();
byte[] default_config = m.get_allSettings();
saveFile("default.bin", default_config);
...
Ces paramètres peuvent être appliqués sur d'autres modules à l'aide de la méthode set_allSettings().
byte[] default_config = loadFile("default.bin");
YModule m = YModule.FirstModule();
while (m != null) {
if (m.get_productName() == "YoctoHub-Wireless") {
m.set_allSettings(default_config);
}
m = m.next();
}
Chercher le bon firmware
La première étape pour mettre à jour un module Yoctopuce est de trouver quel firmware il faut utiliser, c'est le travail de la méthode checkFirmware(path, onlynew) de l'objet YModule. Cette méthode vérifie que le firmware passé en argument (path) est compatible avec le module. Si le paramètre onlynew est vrai, cette méthode vérifie si le firmware est plus récent que la version qui est actuellement utilisée par le module. Quand le fichier n'est pas compatible (ou si le fichier est plus vieux que la version installée), cette méthode retourne une chaîne vide. Si au contraire le fichier est valide, la méthode retourne le chemin d'accès d'un fichier.
Le code suivant vérifie si le fichier c:\tmp\METEOMK1.17328.byn est compatible avec le module stocké dans la variable m.
YModule m = YModule.FirstModule();
...
...
string path = "c:\\tmp\METEOMK1.17328.byn";
string newfirm = m.checkFirmware(path, false);
if (newfirm != "") {
Console.WriteLine("firmware " + newfirm + " is compatible");
}
...
Il est possible de passer un répertoire en argument (au lieu d'un fichier). Dans ce cas la méthode va parcourir récursivement tous les fichiers du répertoire et retourner le firmware compatible le plus récent. Le code suivant vérifie s'il existe un firmware plus récent dans le répertoire c:\tmp\.
YModule m = YModule.FirstModule();
...
...
string path = "c:\\tmp";
string newfirm = m.checkFirmware(path, true);
if (newfirm != "") {
Console.WriteLine("firmware " + newfirm + " is compatible and newer");
}
...
Il est aussi possible de passer la chaîne "www.yoctopuce.com" en argument pour vérifier s'il existe un firmware plus récent publié sur le site web de Yoctopuce. Dans ce cas, la méthode retournera l'URL du firmware. Vous pourrez soit utiliser cette URL pour télécharger le firmware sur votre disque, soit utiliser cette URL lors de la mise à jour du firmware (voir ci-dessous). Bien évidemment, cette possibilité ne fonctionne que si votre machine est reliée à Internet.
YModule m = YModule.FirstModule();
...
...
string url = m.checkFirmware("www.yoctopuce.com", true);
if (url != "") {
Console.WriteLine("new firmware is available at " + url );
}
...
Mettre à jour le firmware
La mise à jour du firmware peut prendre plusieurs minutes, c'est pourquoi le processus de mise à jour est exécuté par la librairie en arrière plan et est contrôlé par le code utilisateur à l'aide de la classe YFirmwareUdpate.
Pour mettre à jour un module Yoctopuce, il faut obtenir une instance de la classe YFirmwareUpdate à l'aide de la méthode updateFirmware d'un objet YModule. Le seul paramètre de cette méthode est le path du firmware à installer. Cette méthode ne démarre pas immédiatement la mise à jour, mais retourne un objet YFirmwareUpdate configuré pour mettre à jour le module.
string newfirm = m.checkFirmware("www.yoctopuce.com", true);
.....
YFirmwareUpdate fw_update = m.updateFirmware(newfirm);
La méthode startUpdate() démarre la mise à jour en arrière plan. Ce processus en arrière plan se charge automatiquement de:
- sauvegarder des paramètres du module,
- redémarrer le module en mode "mise à jour"
- mettre à jour le firmware
- démarrer le module avec la nouvelle version du firmware
- restaurer les paramètres
Les méthodes get_progress() et get_progressMessage() permettent de suivre la progression de la mise à jour. get_progress()retourne la progression sous forme de pourcentage (100 = mise à jour terminée). get_progressMessage() retourne une chaîne de caractères décrivant l'opération en cours (effacement, écriture, reboot,...). Si la méthode get_progress() retourne une valeur négative, c'est que le processus de mise à jour à échoué. Dans ce cas la méthode get_progressMessage() retourne le message d'erreur.
Le code suivant démarre la mise à jour et affiche la progression sur la sortie standard.
YFirmwareUpdate fw_update = m.updateFirmware(newfirm);
....
int status = fw_update.startUpdate();
while (status < 100 && status >= 0) {
int newstatus = fw_update.get_progress();
if (newstatus != status) {
Console.WriteLine(status + "% "
+ fw_update.get_progressMessage());
}
YAPI.Sleep(500, ref errmsg);
status = newstatus;
}
if (status < 0) {
Console.WriteLine("Firmware Update failed: "
+ fw_update.get_progressMessage());
} else {
Console.WriteLine("Firmware Updated Successfully!");
}
Particularité d'Android
Il est possible de mettre à jour un firmware d'un module en utilisant la librairie Android. Mais pour les modules branchés en USB, Android va demander à l'utilisateur d'autoriser l'application à accéder au port USB.
Pendant la mise à jour du firmware, le module redémarre plusieurs fois. Android interprète le reboot d'un périphérique USB comme une déconnexion et reconnexion du port USB, et interdit tout accès USB tant que l'utilisateur n'a pas fermé le pop-up. L'utilisateur est obligé de cliquer sur OK pour que la procédure de mise à jour puisse continuer correctement. Il n'est pas possible de mettre à jour un module branché en USB à un appareil Android sans que l'utilisateur ne soit obligé d'interagir avec l'appareil.
18.5. Le mode "mise à jour"
Si vous désirez effacer tous les paramètres du module ou que votre module ne démarre plus correctement, il est possible d'installer un firmware depuis le mode "mise à jour".
Pour forcer le module à fonctionner dans le mode "mis à jour", débranchez-le, attendez quelques secondes, et rebranchez-le en maintenant le Yocto-Bouton appuyé. Cela a pour effet de faire démarrer le module en mode "mise à jour". Ce mode de fonctionnement est protégé contre les corruptions et est toujours accessible.
Dans ce mode, le module n'est plus détecté par les objets YModules. Pour obtenir la liste des modules connectés en mode "mise à jour", il faut utiliser la fonction YAPI.GetAllBootLoaders(). Cette fonction retourne un tableau de chaînes de caractères avec le numéro de série des modules en le mode "mise à jour".
List<string> allBootLoader = YAPI.GetAllBootLoaders();
La procédure de mise à jour est identique au cas standard (voir section précédente), mais il faut instancier manuellement l'objet YFirmwareUpdate au lieu d'appeler module.updateFirmware(). Le constructeur prend en argument trois paramètres: le numéro de série du module, le path du firmware à installer, et un tableau de bytes avec les paramètres à restaurer à la fin de la mise à jour (ou null pour restaurer les paramètres d'origine).
YFirmwareUpdateupdate fw_update;
fw_update = new YFirmwareUpdate(allBootLoader[0], newfirm, null);
int status = fw_update.startUpdate();
.....
19. Utilisation avec des langages non supportés
Les modules Yoctopuce peuvent être contrôlés depuis la plupart des langages de programmation courants. De nouveaux langages sont ajoutés régulièrement en fonction de l'intérêt exprimé par les utilisateurs de produits Yoctopuce. Cependant, certains langages ne sont pas et ne seront jamais supportés par Yoctopuce, les raisons peuvent être diverses: compilateurs plus disponibles, environnements inadaptés, etc...
Il existe cependant des méthodes alternatives pour accéder à des modules Yoctopuce depuis un langage de programmation non supporté.
19.1. Ligne de commande
Le moyen le plus simple pour contrôler des modules Yoctopuce depuis un langage non supporté consiste à utiliser l'API en ligne de commande à travers des appels système. L'API en ligne de commande se présente en effet sous la forme d'un ensemble de petits exécutables qu'il est facile d'appeler et dont la sortie est facile à analyser. La plupart des langages de programmation permettant d'effectuer des appels système, cela permet de résoudre le problème en quelques lignes.
Cependant, si l'API en ligne de commande est la solution la plus facile, ce n'est pas la plus rapide ni la plus efficace. A chaque appel, l'exécutable devra initialiser sa propre API et faire l'inventaire des modules USB connectés. Il faut compter environ une seconde par appel.
19.2. Virtual Hub et HTTP GET
Le Virtual Hub est disponible pour presque toutes les plateformes actuelles, il sert généralement de passerelle pour permettre l'accès aux modules Yoctopuce depuis des langages qui interdisent l'accès direct aux couches matérielles d'un ordinateur (Javascript, PHP, Java...).
Il se trouve que le Virtual Hub est en fait un petit serveur Web qui est capable de router des requêtes HTTP vers les modules Yoctopuce. Ce qui signifie que si vous pouvez faire une requête HTTP depuis votre langage de programmation, vous pouvez contrôler des modules Yoctopuce, même si ce langage n'est pas officiellement supporté.
Interface REST
A bas niveau, les modules sont pilotés à l'aide d'une API REST. Ainsi pour contrôler un module, il suffit de faire les requêtes HTTP appropriées sur le Virtual Hub. Par défaut le port HTTP du Virtual Hub est 4444.
Un des gros avantages de cette technique est que les tests préliminaires sont très faciles à mettre en œuvre, il suffit d'un Virtual Hub et d'un simple browser Web. Ainsi, si vous copiez l'URL suivante dans votre browser favori, alors que le Virtual Hub est en train de tourner, vous obtiendrez la liste des modules présents.
http://127.0.0.1:4444/api/services/whitePages.txt
Remarquez que le résultat est présenté sous forme texte, mais en demandant whitePages.xml vous auriez obtenu le résultat en XML. De même, whitePages.json aurait permis d'obtenir le résultat en JSON. L'extension html vous permet même d'afficher une interface sommaire vous permettant de changer les valeurs en direct. Toute l'API REST est disponible dans ces différents formats.
Contrôle d'un module par l'interface REST
Chaque module Yoctopuce a sa propre interface REST disponible sous différentes formes. Imaginons un Yocto-Color avec le numéro de de série YRGBLED1-12345 et le nom logique monModule. l'URL suivante permettra de connaître l'état du module.
http://127.0.0.1:4444/bySerial/YRGBLED1-12345/api/module.txt
Il est bien entendu possible d'utiliser le nom logique des modules plutôt que leur numéro de série.
http://127.0.0.1:4444/byName/monModule/api/module.txt
Vous pouvez retrouver la valeur d'une des propriétés d'un module, il suffit d'ajouter le nom de la propriété en dessous de module. Par exemple, si vous souhaitez connaître la luminosité des LEDs de signalisation, il vous suffit de faire la requête suivante:
http://127.0.0.1:4444/bySerial/YRGBLED1-12345/api/module/luminosity
Pour modifier la valeur d'une propriété, il vous suffit de modifier l'attribut correspondant. Ainsi, pour modifier la luminosité il vous suffit de faire la requête suivante:
http://127.0.0.1:4444/bySerial/YRGBLED1-12345/api/module?luminosity=100
Contrôle des différentes fonctions du module par l'interface REST
Les fonctionnalités des modules se manipulent de la même manière. Pour connaître l'état de la fonction colorLed1, il suffit de construire l'URL suivante.
http://127.0.0.1:4444/bySerial/YRGBLED1-12345/api/colorLed1.txt
En revanche, si vous pouvez utiliser le nom logique du module en lieu et place de son numéro de série, vous ne pouvez pas utiliser les noms logiques des fonctions, seuls les noms hardware sont autorisés pour les fonctions.
Vous pouvez retrouver un attribut d'une fonction d'un module d'une manière assez similaire à celle utilisée avec les modules, par exemple:
http://127.0.0.1:4444/bySerial/YRGBLED1-12345/api/colorLed1/logicalName
Assez logiquement, les attributs peuvent être modifiés de la même manière.
http://127.0.0.1:4444/bySerial/YRGBLED1-12345/api/colorLed1?logicalName=maFonction
Vous trouverez la liste des attributs disponibles pour votre Yocto-Color au début du chapitre Programmation, concepts généraux.
Accès aux données enregistrées sur le datalogger par l'interface REST
Cette section s'applique uniquement aux modules dotés d'un enregistreur de donnée.
La version résumée des données enregistrées dans le datalogger peut être obtenue au format JSON à l'aide de l'URL suivante:
http://127.0.0.1:4444/bySerial/YRGBLED1-12345/dataLogger.json
Le détail de chaque mesure pour un chaque tranche d'enregistrement peut être obtenu en ajoutant à l'URL l'identifiant de la fonction désirée et l'heure de départ de la tranche:
http://127.0.0.1:4444/bySerial/YRGBLED1-12345/dataLogger.json?id=colorLed1&utc=1389801080
19.3. Utilisation des librairies dynamiques
L'API Yoctopuce bas niveau est disponible sous différents formats de librairie dynamiques écrites en C, dont les sources sont disponibles avec l'API C++. Utiliser une de ces librairies bas niveau vous permettra de vous passer du Virtual Hub.
| Filename | Plateforme |
|---|---|
| libyapi.dylib | Max OS X |
| libyapi-amd64.so | Linux Intel (64 bits) |
| libyapi-armel.so | Linux ARM EL |
| libyapi-armhf.so | Linux ARM HL |
| libyapi-i386.so | Linux Intel (32 bits) |
| yapi64.dll | Windows (64 bits) |
| yapi.dll | Windows (32 bits) |
Ces librairies dynamiques contiennent toutes les fonctionnalités nécessaires pour reconstruire entièrement toute l'API haut niveau dans n'importe quel langage capable d'intégrer ces librairies. Ce chapitre se limite cependant à décrire une utilisation de base des modules.
Contrôle d'un module
Les trois fonctions essentielles de l'API bas niveau sont les suivantes:
int yapiInitAPI(int connection_type, char *errmsg);
int yapiUpdateDeviceList(int forceupdate, char *errmsg);
int yapiHTTPRequest(char *device, char *request, char* buffer,int buffsize,int *fullsize, char *errmsg);
La fonction yapiInitAPI permet d'initialiser l'API et doit être appelée une fois en début du programme. Pour une connection de type USB, le paramètre connection_type doit prendre la valeur 1. errmsg est un pointeur sur un buffer de 255 caractères destiné à récupérer un éventuel message d'erreur. Ce pointeur peut être aussi mis à NULL. La fonction retourne un entier négatif en cas d'erreur, ou zéro dans le cas contraire.
La fonction yapiUpdateDeviceList gère l'inventaire des modules Yoctopuce connectés, elle doit être appelée au moins une fois. Pour pouvoir gérer le hot plug, et détecter d'éventuels nouveaux modules connectés, cette fonction devra être apellée à intervalles réguliers. Le paramètre forceupdate devra être à la valeur 1 pour forcer un scan matériel. Le paramètre errmsg devra pointer sur un buffer de 255 caractères pour récupérer un éventuel message d'erreur. Ce pointeur peut aussi être à null.Cette fonction retourne un entier négatif en cas d'erreur, ou zéro dans le cas contraire.
Enfin, la fonction yapiHTTPRequest permet d'envoyer des requêtes HTTP à l'API REST du module. Le paramètre device devra contenir le numéro de série ou le nom logique du module que vous cherchez à atteindre. Le paramètre request doit contenir la requête HTTP complète (y compris les sauts de ligne terminaux). buffer doit pointer sur un buffer de caractères suffisamment grand pour contenir la réponse. buffsize doit contenir la taille du buffer. fullsize est un pointeur sur un entier qui sera affecté à la taille effective de la réponse. Le paramètre errmsg devra pointer sur un buffer de 255 caractères pour récupérer un éventuel message d'erreur. Ce pointeur peut aussi être à null. Cette fonction retourne un entier négatif en cas d'erreur, ou zéro dans le cas contraire.
Le format des requêtes est le même que celui décrit dans la section Virtual Hub et HTTP GET. Toutes les chaînes de caractères utilisées par l'API sont des chaînes constituées de caractères 8 bits: l'Unicode et l'UTF8 ne sont pas supportés.
Le résultat retourné dans la variable buffer respecte le protocole HTTP, il inclut donc un header HTTP . Ce header se termine par deux lignes vides, c'est-à-dire une séquence de quatre caractères ASCII 13, 10, 13, 10.
Voici un programme d'exemple écrit en pascal qui utilise la DLL yapi.dll pour lire puis changer la luminosité d'un module.
// Dll functions import
function yapiInitAPI(mode:integer;
errmsg : pansichar):integer;cdecl;
external 'yapi.dll' name 'yapiInitAPI';
function yapiUpdateDeviceList(force:integer;errmsg : pansichar):integer;cdecl;
external 'yapi.dll' name 'yapiUpdateDeviceList';
function yapiHTTPRequest(device:pansichar;url:pansichar; buffer:pansichar;
buffsize:integer;var fullsize:integer;
errmsg : pansichar):integer;cdecl;
external 'yapi.dll' name 'yapiHTTPRequest';
var
errmsgBuffer : array [0..256] of ansichar;
dataBuffer : array [0..1024] of ansichar;
errmsg,data : pansichar;
fullsize,p : integer;
const
serial = 'YRGBLED1-12345';
getValue = 'GET /api/module/luminosity HTTP/1.1'#13#10#13#10;
setValue = 'GET /api/module?luminosity=100 HTTP/1.1'#13#10#13#10;
begin
errmsg := @errmsgBuffer;
data := @dataBuffer;
// API initialization
if(yapiInitAPI(1,errmsg)<0) then
begin
writeln(errmsg);
halt;
end;
// forces a device inventory
if( yapiUpdateDeviceList(1,errmsg)<0) then
begin
writeln(errmsg);
halt;
end;
// requests the module luminosity
if (yapiHTTPRequest(serial,getValue,data,sizeof(dataBuffer),fullsize,errmsg)<0) then
begin
writeln(errmsg);
halt;
end;
// searches for the HTTP header end
p := pos(#13#10#13#10,data);
// displays the response minus the HTTP header
writeln(copy(data,p+4,length(data)-p-3));
// change the luminosity
if (yapiHTTPRequest(serial,setValue,data,sizeof(dataBuffer),fullsize,errmsg)<0) then
begin
writeln(errmsg);
halt;
end;
end.
Inventaire des modules
Pour procéder à l'inventaire des modules Yoctopuce, deux fonctions de la librairie dynamique sont nécessaires
int yapiGetAllDevices(int *buffer,int maxsize,int *neededsize,char *errmsg);
int yapiGetDeviceInfo(int devdesc,yDeviceSt *infos, char *errmsg);
La fonction yapiGetAllDevices permet d'obtenir la liste des modules connectés sous la forme d'une liste de handles. buffer pointe sur un tableau d'entiers 32 bits qui contiendra les handles retournés. Maxsize est la taille en bytes du buffer. neededsize contiendra au retour la taille nécessaire pour stocker tous les handles. Cela permet d'en déduire le nombre de module connectés, ou si le buffer passé en entrée est trop petit. Le paramètre errmsg devra pointer sur un buffer de 255 caractères pour récupérer un éventuel message d'erreur. Ce pointeur peut aussi être à null. Cette fonction retourne un entier négatif en cas d'erreur, ou zéro dans le cas contraire.
La fonction yapiGetDeviceInfo permet de récupérer les informations relatives à un module à partir de son handle. devdesc est un entier 32bit qui représente le module, et qui a été obtenu grâce à yapiGetAllDevices. infos pointe sur une structure de données dans laquelle sera stocké le résultat. Le format de cette structure est le suivant:
| Nom | Type | Taille (bytes) | Description |
|---|---|---|---|
| vendorid | int | 4 | ID USB de Yoctopuce |
| deviceid | int | 4 | ID USB du module |
| devrelease | int | 4 | Version du module |
| nbinbterfaces | int | 4 | Nombre d'interfaces USB utilisée par le module |
| manufacturer | char[] | 20 | Yoctopuce (null terminé) |
| productname | char[] | 28 | Modèle (null terminé) |
| serial | char[] | 20 | Numéro de série (null terminé) |
| logicalname | char[] | 20 | Nom logique (null terminé) |
| firmware | char[] | 22 | Version du firmware (null terminé) |
| beacon | byte | 1 | Etat de la balise de localisation (0/1) |
Le paramètre errmsg devra pointer sur un buffer de 255 caractères pour récupérer un éventuel message d'erreur.
Voici un programme d'exemple écrit en pascal qui utilise la DLL yapi.dll pour lister les modules connectés.
// device description structure
type yDeviceSt = packed record
vendorid : word;
deviceid : word;
devrelease : word;
nbinbterfaces : word;
manufacturer : array [0..19] of ansichar;
productname : array [0..27] of ansichar;
serial : array [0..19] of ansichar;
logicalname : array [0..19] of ansichar;
firmware : array [0..21] of ansichar;
beacon : byte;
end;
// Dll function import
function yapiInitAPI(mode:integer;
errmsg : pansichar):integer;cdecl;
external 'yapi.dll' name 'yapiInitAPI';
function yapiUpdateDeviceList(force:integer;errmsg : pansichar):integer;cdecl;
external 'yapi.dll' name 'yapiUpdateDeviceList';
function yapiGetAllDevices( buffer:pointer;
maxsize:integer;
var neededsize:integer;
errmsg : pansichar):integer; cdecl;
external 'yapi.dll' name 'yapiGetAllDevices';
function apiGetDeviceInfo(d:integer; var infos:yDeviceSt;
errmsg : pansichar):integer; cdecl;
external 'yapi.dll' name 'yapiGetDeviceInfo';
var
errmsgBuffer : array [0..256] of ansichar;
dataBuffer : array [0..127] of integer; // max of 128 USB devices
errmsg,data : pansichar;
neededsize,i : integer;
devinfos : yDeviceSt;
begin
errmsg := @errmsgBuffer;
// API initialisation
if(yapiInitAPI(1,errmsg)<0) then
begin
writeln(errmsg);
halt;
end;
// forces a device inventory
if( yapiUpdateDeviceList(1,errmsg)<0) then
begin
writeln(errmsg);
halt;
end;
// loads all device handles into dataBuffer
if yapiGetAllDevices(@dataBuffer,sizeof(dataBuffer),neededsize,errmsg)<0 then
begin
writeln(errmsg);
halt;
end;
// gets device info from each handle
for i:=0 to neededsize div sizeof(integer)-1 do
begin
if (apiGetDeviceInfo(dataBuffer[i], devinfos, errmsg)<0) then
begin
writeln(errmsg);
halt;
end;
writeln(pansichar(@devinfos.serial)+' ('+pansichar(@devinfos.productname)+')');
end;
end.
VB6 et yapi.dll
Chaque point d'entrée de la DLL yapi.dll est disponible en deux versions, une classique C-decl, et un seconde compatible avec Visual Basic 6 préfixée avec vb6_.
19.4. Port de la librairie haut niveau
Toutes les sources de l'API Yoctopuce étant fournies dans leur intégralité, vous pouvez parfaitement entreprendre le port complet de l'API dans le langage de votre choix. Sachez cependant qu'une grande partie du code source de l'API est généré automatiquement.
Ainsi, il n'est pas nécessaire de porter la totalité de l'API, il suffit de porter le fichier yocto_api et un de ceux correspondant à une fonctionnalité, par exemple yocto_relay. Moyennant un peu de travail supplémentaire, Yoctopuce sera alors en mesure de générer tous les autres fichiers. C'est pourquoi il est fortement recommandé de contacter le support Yoctopuce avant d'entreprendre le port de la librairie Yoctopuce dans un autre langage. Un travail collaboratif sera profitable aux deux parties.
20. Référence de l'API de haut niveau
Ce chapitre résume les fonctions de l'API de haut niveau pour commander votre Yocto-Color. La syntaxe et les types précis peuvent varier d'un langage à l'autre mais, sauf avis contraire toutes sont disponibles dans chaque language. Pour une information plus précise sur les types des arguments et des valeurs de retour dans un langage donné, veuillez vous référer au fichier de définition pour ce langage (yocto_api.* ainsi que les autres fichiers yocto_* définissant les interfaces des fonctions).
Dans les langages qui supportent les exceptions, toutes ces fonctions vont par défaut générer des exceptions en cas d'erreur plutôt que de retourner la valeur d'erreur documentée pour chaque fonction, afin de faciliter le déboguage. Il est toutefois possible de désactiver l'utilisation d'exceptions à l'aide de la fonction yDisableExceptions(), si l'on préfère travailler avec des valeurs de retour d'erreur.
Ce chapitre ne reprend pas en détail les concepts de programmation décrits plus tôt, afin d'offrir une référence plus concise. En cas de doute, n'hésitez pas à retourner au chapitre décrivant en détail de chaque attribut configurable.
20.1. Fonctions générales
Ces quelques fonctions générales permettent l'initialisation et la configuration de la librairie Yoctopuce. Dans la plupart des cas, un appel à yRegisterHub() suffira en tout et pour tout. Ensuite, vous pourrez appeler la fonction globale yFind...() ou yFirst...() correspondant à votre module pour pouvoir interagir avec lui.
Pour utiliser les fonctions décrites ici, vous devez inclure:
js | <script type='text/javascript' src='yocto_api.js'></script> |
nodejs | var yoctolib = require('yoctolib'); var YAPI = yoctolib.YAPI; var YModule = yoctolib.YModule; |
cpp | #include "yocto_api.h" |
m | #import "yocto_api.h" |
pas | uses yocto_api; |
vb | yocto_api.vb |
cs | yocto_api.cs |
java | import com.yoctopuce.YoctoAPI.YModule; |
uwp | import com.yoctopuce.YoctoAPI.YModule; |
py | from yocto_api import * |
php | require_once('yocto_api.php'); |
es | in HTML: <script src="../../lib/yocto_api.js"></script> in node.js: require('yoctolib-es2017/yocto_api.js'); |
| Fonction globales |
|---|
| yCheckLogicalName(name) |
Vérifie si un nom donné est valide comme nom logique pour un module ou une fonction. |
| yDisableExceptions() |
Désactive l'utilisation d'exceptions pour la gestion des erreurs. |
| yEnableExceptions() |
Réactive l'utilisation d'exceptions pour la gestion des erreurs. |
| yEnableUSBHost(osContext) |
Cette fonction est utilisée uniquement sous Android. |
| yFreeAPI() |
Libère la mémoire dynamique utilisée par la librairie Yoctopuce. |
| yGetAPIVersion() |
Retourne la version de la librairie Yoctopuce utilisée. |
| yGetTickCount() |
Retourne la valeur du compteur monotone de temps (en millisecondes). |
| yHandleEvents(errmsg) |
Maintient la communication de la librairie avec les modules Yoctopuce. |
| yInitAPI(mode, errmsg) |
Initialise la librairie de programmation de Yoctopuce explicitement. |
| yPreregisterHub(url, errmsg) |
Alternative plus tolerante à RegisterHub(). |
| yRegisterDeviceArrivalCallback(arrivalCallback) |
Enregistre une fonction de callback qui sera appelée à chaque fois qu'un module est branché. |
| yRegisterDeviceRemovalCallback(removalCallback) |
Enregistre une fonction de callback qui sera appelée à chaque fois qu'un module est débranché. |
| yRegisterHub(url, errmsg) |
Configure la librairie Yoctopuce pour utiliser les modules connectés sur une machine donnée. |
| yRegisterHubDiscoveryCallback(hubDiscoveryCallback) |
Enregistre une fonction de callback qui est appelée chaque fois qu'un hub réseau s'annonce avec un message SSDP. |
| yRegisterLogFunction(logfun) |
Enregistre une fonction de callback qui sera appellée à chaque fois que l'API a quelque chose à dire. |
| ySelectArchitecture(arch) |
Sélectionne manuellement l'architecture de la libraire dynamique à utiliser pour accéder à USB. |
| ySetDelegate(object) |
(Objective-C uniquement) Enregistre un objet délégué qui doit se conformer au protocole YDeviceHotPlug. |
| ySetTimeout(callback, ms_timeout, args) |
Appelle le callback spécifié après un temps d'attente spécifié. |
| ySetUSBPacketAckMs(pktAckDelay) |
Active la quittance des paquets USB reçus par la librairie Yoctopuce. |
| ySleep(ms_duration, errmsg) |
Effectue une pause dans l'exécution du programme pour une durée spécifiée. |
| yTestHub(url, mstimeout, errmsg) |
Test si un hub est joignable. |
| yTriggerHubDiscovery(errmsg) |
Relance une détection des hubs réseau. |
| yUnregisterHub(url) |
Configure la librairie Yoctopuce pour ne plus utiliser les modules connectés sur une machine préalablement enregistrer avec RegisterHub. |
| yUpdateDeviceList(errmsg) |
Force une mise-à-jour de la liste des modules Yoctopuce connectés. |
| yUpdateDeviceList_async(callback, context) |
Force une mise-à-jour de la liste des modules Yoctopuce connectés. |
YAPI.CheckLogicalName()
yCheckLogicalName()yCheckLogicalName()YAPI.CheckLogicalName()yCheckLogicalName()[YAPI CheckLogicalName: ]yCheckLogicalName()yCheckLogicalName()YAPI.CheckLogicalName()YAPI.CheckLogicalName()YAPI.CheckLogicalName()YAPI.CheckLogicalName()yCheckLogicalName()YAPI.CheckLogicalName()
Vérifie si un nom donné est valide comme nom logique pour un module ou une fonction.
js | function yCheckLogicalName( | name) |
nodejs | function CheckLogicalName( | name) |
cpp | bool yCheckLogicalName( | const string& name) |
m | +(BOOL) CheckLogicalName | :(NSString *) name |
pas | function yCheckLogicalName( | name: string): boolean |
vb | function yCheckLogicalName( | ByVal name As String) As Boolean |
cs | bool CheckLogicalName( | string name) |
java | boolean CheckLogicalName( | String name) |
uwp | bool CheckLogicalName( | string name) |
py | def CheckLogicalName( | name) |
php | function yCheckLogicalName( | $name) |
es | function CheckLogicalName( | name) |
Un nom logique valide est formé de 19 caractères au maximum, choisis parmi A..Z, a..z, 0..9, _ et -. Lorsqu'on configure un nom logique avec une chaîne incorrecte, les caractères invalides sont ignorés.
Paramètres :
| name | une chaîne de caractères contenant le nom vérifier. |
Retourne :
true si le nom est valide, false dans le cas contraire.
YAPI.DisableExceptions()
yDisableExceptions()yDisableExceptions()YAPI.DisableExceptions()yDisableExceptions()[YAPI DisableExceptions]yDisableExceptions()yDisableExceptions()YAPI.DisableExceptions()YAPI.DisableExceptions()yDisableExceptions()YAPI.DisableExceptions()
Désactive l'utilisation d'exceptions pour la gestion des erreurs.
js | function yDisableExceptions( | ) |
nodejs | function DisableExceptions( | ) |
cpp | void yDisableExceptions( | ) |
m | +(void) DisableExceptions |
pas | procedure yDisableExceptions( | ) |
vb | procedure yDisableExceptions( | ) |
cs | void DisableExceptions( | ) |
py | def DisableExceptions( | ) |
php | function yDisableExceptions( | ) |
es | function DisableExceptions( | ) |
Lorsque les exceptions sont désactivées, chaque fonction retourne une valeur d'erreur spécifique selon son type, documentée dans ce manuel de référence.
YAPI.EnableExceptions()
yEnableExceptions()yEnableExceptions()YAPI.EnableExceptions()yEnableExceptions()[YAPI EnableExceptions]yEnableExceptions()yEnableExceptions()YAPI.EnableExceptions()YAPI.EnableExceptions()yEnableExceptions()YAPI.EnableExceptions()
Réactive l'utilisation d'exceptions pour la gestion des erreurs.
js | function yEnableExceptions( | ) |
nodejs | function EnableExceptions( | ) |
cpp | void yEnableExceptions( | ) |
m | +(void) EnableExceptions |
pas | procedure yEnableExceptions( | ) |
vb | procedure yEnableExceptions( | ) |
cs | void EnableExceptions( | ) |
py | def EnableExceptions( | ) |
php | function yEnableExceptions( | ) |
es | function EnableExceptions( | ) |
Attention, lorsque les exceptions sont activées, tout appel à une fonction de la librairie qui échoue déclenche une exception. Dans le cas où celle-ci n'est pas interceptée correctement par le code appelant, soit le debugger se lance, soit le programme de l'utilisateur est immédiatement stoppé (crash).
YAPI.EnableUSBHost()
yEnableUSBHost()YAPI.EnableUSBHost()
Cette fonction est utilisée uniquement sous Android.
java | void EnableUSBHost( | Object osContext) |
Avant d'appeler yRegisterHub("usb") il faut activer le port USB host du systeme. Cette fonction prend en argument un objet de la classe android.content.Context (ou d'une sous-classe). Il n'est pas nécessaire d'appeler cette fonction pour accéder au modules à travers le réseau.
Paramètres :
| osContext | un objet de classe android.content.Context (ou une sous-classe) |
YAPI.FreeAPI()
yFreeAPI()yFreeAPI()YAPI.FreeAPI()yFreeAPI()[YAPI FreeAPI]yFreeAPI()yFreeAPI()YAPI.FreeAPI()YAPI.FreeAPI()YAPI.FreeAPI()YAPI.FreeAPI()yFreeAPI()YAPI.FreeAPI()
Libère la mémoire dynamique utilisée par la librairie Yoctopuce.
js | function yFreeAPI( | ) |
nodejs | function FreeAPI( | ) |
cpp | void yFreeAPI( | ) |
m | +(void) FreeAPI |
pas | procedure yFreeAPI( | ) |
vb | procedure yFreeAPI( | ) |
cs | void FreeAPI( | ) |
java | void FreeAPI( | ) |
uwp | void FreeAPI( | ) |
py | def FreeAPI( | ) |
php | function yFreeAPI( | ) |
es | function FreeAPI( | ) |
Il n'est en général pas nécessaire d'appeler cette fonction, sauf si vous désirez libérer tous les blocs de mémoire alloués dynamiquement dans le but d'identifier une source de blocs perdus par exemple. Vous ne devez plus appeler aucune fonction de la librairie après avoir appelé yFreeAPI(), sous peine de crash.
YAPI.GetAPIVersion()
yGetAPIVersion()yGetAPIVersion()YAPI.GetAPIVersion()yGetAPIVersion()[YAPI GetAPIVersion]yGetAPIVersion()yGetAPIVersion()YAPI.GetAPIVersion()YAPI.GetAPIVersion()YAPI.GetAPIVersion()YAPI.GetAPIVersion()yGetAPIVersion()YAPI.GetAPIVersion()
Retourne la version de la librairie Yoctopuce utilisée.
js | function yGetAPIVersion( | ) |
nodejs | function GetAPIVersion( | ) |
cpp | string yGetAPIVersion( | ) |
m | +(NSString*) GetAPIVersion |
pas | function yGetAPIVersion( | ): string |
vb | function yGetAPIVersion( | ) As String |
cs | String GetAPIVersion( | ) |
java | String GetAPIVersion( | ) |
uwp | string GetAPIVersion( | ) |
py | def GetAPIVersion( | ) |
php | function yGetAPIVersion( | ) |
es | function GetAPIVersion( | ) |
La version est retournée sous forme d'une chaîne de caractères au format "Majeure.Mineure.NoBuild", par exemple "1.01.5535". Pour les langages utilisant une DLL externe (par exemple C#, VisualBasic ou Delphi), la chaîne contient en outre la version de la DLL au même format, par exemple "1.01.5535 (1.01.5439)".
Si vous désirez vérifier dans votre code que la version de la librairie est compatible avec celle que vous avez utilisé durant le développement, vérifiez que le numéro majeur soit strictement égal et que le numéro mineur soit égal ou supérieur. Le numéro de build n'est pas significatif par rapport à la compatibilité de la librairie.
Retourne :
une chaîne de caractères décrivant la version de la librairie.
YAPI.GetTickCount()
yGetTickCount()yGetTickCount()YAPI.GetTickCount()yGetTickCount()[YAPI GetTickCount]yGetTickCount()yGetTickCount()YAPI.GetTickCount()YAPI.GetTickCount()YAPI.GetTickCount()YAPI.GetTickCount()yGetTickCount()YAPI.GetTickCount()
Retourne la valeur du compteur monotone de temps (en millisecondes).
js | function yGetTickCount( | ) |
nodejs | function GetTickCount( | ) |
cpp | u64 yGetTickCount( | ) |
m | +(u64) GetTickCount |
pas | function yGetTickCount( | ): u64 |
vb | function yGetTickCount( | ) As Long |
cs | ulong GetTickCount( | ) |
java | long GetTickCount( | ) |
uwp | ulong GetTickCount( | ) |
py | def GetTickCount( | ) |
php | function yGetTickCount( | ) |
es | function GetTickCount( | ) |
Ce compteur peut être utilisé pour calculer des délais en rapport avec les modules Yoctopuce, dont la base de temps est aussi la milliseconde.
Retourne :
un long entier contenant la valeur du compteur de millisecondes.
YAPI.HandleEvents()
yHandleEvents()yHandleEvents()YAPI.HandleEvents()yHandleEvents()[YAPI HandleEvents: ]yHandleEvents()yHandleEvents()YAPI.HandleEvents()YAPI.HandleEvents()YAPI.HandleEvents()YAPI.HandleEvents()yHandleEvents()YAPI.HandleEvents()
Maintient la communication de la librairie avec les modules Yoctopuce.
js | function yHandleEvents( | errmsg) |
nodejs | function HandleEvents( | errmsg) |
cpp | YRETCODE yHandleEvents( | string& errmsg) |
m | +(YRETCODE) HandleEvents | :(NSError**) errmsg |
pas | function yHandleEvents( | var errmsg: string): integer |
vb | function yHandleEvents( | ByRef errmsg As String) As YRETCODE |
cs | YRETCODE HandleEvents( | ref string errmsg) |
java | int HandleEvents( | ) |
uwp | async Task<int> HandleEvents( | ) |
py | def HandleEvents( | errmsg=None) |
php | function yHandleEvents( | &$errmsg) |
es | function HandleEvents( | errmsg) |
Si votre programme inclut des longues boucles d'attente, vous pouvez y inclure un appel à cette fonction pour que la librairie prenne en charge les informations mise en attente par les modules sur les canaux de communication. Ce n'est pas strictement indispensable mais cela peut améliorer la réactivité des la librairie pour les commandes suivantes.
Cette fonction peut signaler une erreur au cas à la communication avec un module Yoctopuce ne se passerait pas comme attendu.
Paramètres :
| errmsg | une chaîne de caractères passée par référence, dans laquelle sera stocké un éventuel message d'erreur. |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
YAPI.InitAPI()
yInitAPI()yInitAPI()YAPI.InitAPI()yInitAPI()[YAPI InitAPI: ]yInitAPI()yInitAPI()YAPI.InitAPI()YAPI.InitAPI()YAPI.InitAPI()YAPI.InitAPI()yInitAPI()YAPI.InitAPI()
Initialise la librairie de programmation de Yoctopuce explicitement.
js | function yInitAPI( | mode, errmsg) |
nodejs | function InitAPI( | mode, errmsg) |
cpp | YRETCODE yInitAPI( | int mode, string& errmsg) |
m | +(YRETCODE) InitAPI | :(int) mode :(NSError**) errmsg |
pas | function yInitAPI( | mode: integer, var errmsg: string): integer |
vb | function yInitAPI( | ByVal mode As Integer, ByRef errmsg As String) As Integer |
cs | int InitAPI( | int mode, ref string errmsg) |
java | int InitAPI( | int mode) |
uwp | async Task<int> InitAPI( | int mode) |
py | def InitAPI( | mode, errmsg=None) |
php | function yInitAPI( | $mode, &$errmsg) |
es | function InitAPI( | mode, errmsg) |
Il n'est pas indispensable d'appeler yInitAPI(), la librairie sera automatiquement initialisée de toute manière au premier appel à yRegisterHub().
Lorsque cette fonctin est utilisée avec comme mode la valeur Y_DETECT_NONE, il faut explicitement appeler yRegisterHub() pour indiquer à la librairie sur quel VirtualHub les modules sont connectés, avant d'essayer d'y accéder.
Paramètres :
| mode | un entier spécifiant le type de détection automatique de modules à utiliser. Les valeurs possibles sont Y_DETECT_NONE, Y_DETECT_USB, Y_DETECT_NET et Y_DETECT_ALL. |
| errmsg | une chaîne de caractères passée par référence, dans laquelle sera stocké un éventuel message d'erreur. |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
YAPI.PreregisterHub()
yPreregisterHub()yPreregisterHub()YAPI.PreregisterHub()yPreregisterHub()[YAPI PreregisterHub: ]yPreregisterHub()yPreregisterHub()YAPI.PreregisterHub()YAPI.PreregisterHub()YAPI.PreregisterHub()YAPI.PreregisterHub()yPreregisterHub()YAPI.PreregisterHub()
Alternative plus tolerante à RegisterHub().
js | function yPreregisterHub( | url, errmsg) |
nodejs | function PreregisterHub( | url, errmsg) |
cpp | YRETCODE yPreregisterHub( | const string& url, string& errmsg) |
m | +(YRETCODE) PreregisterHub | :(NSString *) url :(NSError**) errmsg |
pas | function yPreregisterHub( | url: string, var errmsg: string): integer |
vb | function yPreregisterHub( | ByVal url As String, |
| ByRef errmsg As String) As Integer |
cs | int PreregisterHub( | string url, ref string errmsg) |
java | int PreregisterHub( | String url) |
uwp | async Task<int> PreregisterHub( | string url) |
py | def PreregisterHub( | url, errmsg=None) |
php | function yPreregisterHub( | $url, &$errmsg) |
es | function PreregisterHub( | url, errmsg) |
Cette fonction a le même but et la même paramètres que la fonction RegisterHub, mais contrairement à celle-ci PreregisterHub() ne déclanche pas d'erreur si le hub choisi n'est pas joignable au moment de l'appel. Il est ainsi possible d'enregistrer un hub réseau indépendemment de la connectivité, afin de tenter de ne le contacter que lorsqu'on cherche réellement un module.
Paramètres :
| url | une chaîne de caractères contenant "usb","callback", ou l'URL racine du VirtualHub à utiliser. |
| errmsg | une chaîne de caractères passée par référence, dans laquelle sera stocké un éventuel message d'erreur. |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
YAPI.RegisterDeviceArrivalCallback()
yRegisterDeviceArrivalCallback()yRegisterDeviceArrivalCallback()YAPI.RegisterDeviceArrivalCallback()yRegisterDeviceArrivalCallback()[YAPI RegisterDeviceArrivalCallback: ]yRegisterDeviceArrivalCallback()yRegisterDeviceArrivalCallback()YAPI.RegisterDeviceArrivalCallback()YAPI.RegisterDeviceArrivalCallback()YAPI.RegisterDeviceArrivalCallback()YAPI.RegisterDeviceArrivalCallback()yRegisterDeviceArrivalCallback()YAPI.RegisterDeviceArrivalCallback()
Enregistre une fonction de callback qui sera appelée à chaque fois qu'un module est branché.
js | function yRegisterDeviceArrivalCallback( | arrivalCallback) |
nodejs | function RegisterDeviceArrivalCallback( | arrivalCallback) |
cpp | void yRegisterDeviceArrivalCallback( | yDeviceUpdateCallback arrivalCallback) |
m | +(void) RegisterDeviceArrivalCallback | :(yDeviceUpdateCallback) arrivalCallback |
pas | procedure yRegisterDeviceArrivalCallback( | arrivalCallback: yDeviceUpdateFunc) |
vb | procedure yRegisterDeviceArrivalCallback( | ByVal arrivalCallback As yDeviceUpdateFunc) |
cs | void RegisterDeviceArrivalCallback( | yDeviceUpdateFunc arrivalCallback) |
java | void RegisterDeviceArrivalCallback( | DeviceArrivalCallback arrivalCallback) |
uwp | void RegisterDeviceArrivalCallback( | DeviceUpdateHandler arrivalCallback) |
py | def RegisterDeviceArrivalCallback( | arrivalCallback) |
php | function yRegisterDeviceArrivalCallback( | $arrivalCallback) |
es | function RegisterDeviceArrivalCallback( | arrivalCallback) |
Le callback sera appelé pendant l'éxecution de la fonction yUpdateDeviceList, que vous devrez appeler régulièrement.
Paramètres :
| arrivalCallback | une procédure qui prend un YModule en paramètre, ou null |
YAPI.RegisterDeviceRemovalCallback()
yRegisterDeviceRemovalCallback()yRegisterDeviceRemovalCallback()YAPI.RegisterDeviceRemovalCallback()yRegisterDeviceRemovalCallback()[YAPI RegisterDeviceRemovalCallback: ]yRegisterDeviceRemovalCallback()yRegisterDeviceRemovalCallback()YAPI.RegisterDeviceRemovalCallback()YAPI.RegisterDeviceRemovalCallback()YAPI.RegisterDeviceRemovalCallback()YAPI.RegisterDeviceRemovalCallback()yRegisterDeviceRemovalCallback()YAPI.RegisterDeviceRemovalCallback()
Enregistre une fonction de callback qui sera appelée à chaque fois qu'un module est débranché.
js | function yRegisterDeviceRemovalCallback( | removalCallback) |
nodejs | function RegisterDeviceRemovalCallback( | removalCallback) |
cpp | void yRegisterDeviceRemovalCallback( | yDeviceUpdateCallback removalCallback) |
m | +(void) RegisterDeviceRemovalCallback | :(yDeviceUpdateCallback) removalCallback |
pas | procedure yRegisterDeviceRemovalCallback( | removalCallback: yDeviceUpdateFunc) |
vb | procedure yRegisterDeviceRemovalCallback( | ByVal removalCallback As yDeviceUpdateFunc) |
cs | void RegisterDeviceRemovalCallback( | yDeviceUpdateFunc removalCallback) |
java | void RegisterDeviceRemovalCallback( | DeviceRemovalCallback removalCallback) |
uwp | void RegisterDeviceRemovalCallback( | DeviceUpdateHandler removalCallback) |
py | def RegisterDeviceRemovalCallback( | removalCallback) |
php | function yRegisterDeviceRemovalCallback( | $removalCallback) |
es | function RegisterDeviceRemovalCallback( | removalCallback) |
Le callback sera appelé pendant l'éxecution de la fonction yUpdateDeviceList, que vous devrez appeler régulièrement.
Paramètres :
| removalCallback | une procédure qui prend un YModule en paramètre, ou null |
YAPI.RegisterHub()
yRegisterHub()yRegisterHub()YAPI.RegisterHub()yRegisterHub()[YAPI RegisterHub: ]yRegisterHub()yRegisterHub()YAPI.RegisterHub()YAPI.RegisterHub()YAPI.RegisterHub()YAPI.RegisterHub()yRegisterHub()YAPI.RegisterHub()
Configure la librairie Yoctopuce pour utiliser les modules connectés sur une machine donnée.
js | function yRegisterHub( | url, errmsg) |
nodejs | function RegisterHub( | url, errmsg) |
cpp | YRETCODE yRegisterHub( | const string& url, string& errmsg) |
m | +(YRETCODE) RegisterHub | :(NSString *) url :(NSError**) errmsg |
pas | function yRegisterHub( | url: string, var errmsg: string): integer |
vb | function yRegisterHub( | ByVal url As String, |
| ByRef errmsg As String) As Integer |
cs | int RegisterHub( | string url, ref string errmsg) |
java | int RegisterHub( | String url) |
uwp | async Task<int> RegisterHub( | string url) |
py | def RegisterHub( | url, errmsg=None) |
php | function yRegisterHub( | $url, &$errmsg) |
es | function RegisterHub( | url, errmsg) |
Le premier paramètre détermine le fonctionnement de l'API, il peut prendre les valeurs suivantes:
usb: Si vous utilisez le mot-clé usb, l'API utilise les modules Yoctopuce connectés directement par USB. Certains languages comme PHP, Javascript et Java ne permettent pas un accès direct aux couches matérielles, usb ne marchera donc pas avec ces languages. Dans ce cas, utilisez un VirtualHub ou un YoctoHub réseau (voir ci-dessous).
x.x.x.x ou hostname: L'API utilise les modules connectés à la machine dont l'adresse IP est x.x.x.x, ou dont le nom d'hôte DNS est hostname. Cette machine peut être un ordinateur classique faisant tourner un VirtualHub, ou un YoctoHub avec réseau (YoctoHub-Ethernet / YoctoHub-Wireless). Si vous désirez utiliser le VirtualHub tournant sur votre machine locale, utilisez l'adresse IP 127.0.0.1.
callback Le mot-clé callback permet de faire fonctionnner l'API dans un mode appélé "callback HTTP". C'est un mode spécial permettant, entre autres, de prendre le contrôle de modules Yoctopuce à travers un filtre NAT par l'intermédiaire d'un VirtualHub ou d'un Hub Yoctopuce. Il vous suffit de configuer le hub pour qu'il appelle votre script à intervalle régulier. Ce mode de fonctionnement n'est disponible actuellement qu'en PHP et en Node.JS.
Attention, seule une application peut fonctionner à la fois sur une machine donnée en accès direct à USB, sinon il y aurait un conflit d'accès aux modules. Cela signifie en particulier que vous devez stopper le VirtualHub avant de lancer une application utilisant l'accès direct à USB. Cette limitation peut être contournée en passant par un VirtualHub plutôt que d'utiliser directement USB.
Si vous désirez vous connecter à un Hub, virtuel ou non, sur lequel le controle d'accès a été activé, vous devez donner le paramètre url sous la forme:
http://nom:mot_de_passe@adresse:port
Vous pouvez appeller RegisterHub plusieurs fois pour vous connecter à plusieurs machines différentes.
Paramètres :
| url | une chaîne de caractères contenant "usb","callback", ou l'URL racine du VirtualHub à utiliser. |
| errmsg | une chaîne de caractères passée par référence, dans laquelle sera stocké un éventuel message d'erreur. |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
YAPI.RegisterHubDiscoveryCallback()
yRegisterHubDiscoveryCallback()yRegisterHubDiscoveryCallback()[YAPI RegisterHubDiscoveryCallback: ]yRegisterHubDiscoveryCallback()yRegisterHubDiscoveryCallback()YAPI.RegisterHubDiscoveryCallback()YAPI.RegisterHubDiscoveryCallback()YAPI.RegisterHubDiscoveryCallback()YAPI.RegisterHubDiscoveryCallback()
Enregistre une fonction de callback qui est appelée chaque fois qu'un hub réseau s'annonce avec un message SSDP.
cpp | void yRegisterHubDiscoveryCallback( | YHubDiscoveryCallback hubDiscoveryCallback) |
m | +(void) RegisterHubDiscoveryCallback | : (YHubDiscoveryCallback) hubDiscoveryCallback |
pas | procedure yRegisterHubDiscoveryCallback( | hubDiscoveryCallback: YHubDiscoveryCallback) |
vb | procedure yRegisterHubDiscoveryCallback( | ByVal hubDiscoveryCallback As YHubDiscoveryCallback) |
cs | void RegisterHubDiscoveryCallback( | YHubDiscoveryCallback hubDiscoveryCallback) |
java | void RegisterHubDiscoveryCallback( | HubDiscoveryCallback hubDiscoveryCallback) |
uwp | async Task RegisterHubDiscoveryCallback( | HubDiscoveryHandler hubDiscoveryCallback) |
py | def RegisterHubDiscoveryCallback( | hubDiscoveryCallback) |
la fonction de callback reçois deux chaînes de caractères en paramètre La première chaîne contient le numéro de série du hub réseau et la deuxième chaîne contient l'URL du hub. L'URL peut être passée directement en argument à la fonction yRegisterHub. Le callback sera appelé pendant l’exécution de la fonction yUpdateDeviceList, que vous devrez appeler régulièrement.
Paramètres :
| hubDiscoveryCallback | une procédure qui prend deux chaîne de caractères en paramètre, ou null |
YAPI.RegisterLogFunction()
yRegisterLogFunction()yRegisterLogFunction()[YAPI RegisterLogFunction: ]yRegisterLogFunction()yRegisterLogFunction()YAPI.RegisterLogFunction()YAPI.RegisterLogFunction()YAPI.RegisterLogFunction()YAPI.RegisterLogFunction()
Enregistre une fonction de callback qui sera appellée à chaque fois que l'API a quelque chose à dire.
cpp | void yRegisterLogFunction( | yLogFunction logfun) |
m | +(void) RegisterLogFunction | :(yLogCallback) logfun |
pas | procedure yRegisterLogFunction( | logfun: yLogFunc) |
vb | procedure yRegisterLogFunction( | ByVal logfun As yLogFunc) |
cs | void RegisterLogFunction( | yLogFunc logfun) |
java | void RegisterLogFunction( | LogCallback logfun) |
uwp | void RegisterLogFunction( | LogHandler logfun) |
py | def RegisterLogFunction( | logfun) |
Utile pour débugger le fonctionnement de l'API.
Paramètres :
| logfun | une procedure qui prend une chaîne de caractère en paramètre, |
YAPI.SelectArchitecture()
ySelectArchitecture()YAPI.SelectArchitecture()
Sélectionne manuellement l'architecture de la libraire dynamique à utiliser pour accéder à USB.
py | def SelectArchitecture( | arch) |
Par défaut, la libraire Python détecte automatiquement la version de la libraire dynamique à utiliser pour accéder au port USB. Sous Linux ARM il n'est pas possible de détecter de manière fiable si il s'agit d'une installation Soft float (armel) ou Hard float (armhf). Dans ce cas, il est donc recommendé d'appeler SelectArchitecture() avant tout autre appel à la librairie pour forcer l'utilisation d'une architecture spécifiée.
Paramètres :
| arch | une chaîne de caractère spécifiant l'architecture à utiliser. Les valeurs possibles sont "armhf","armel", "i386","x86_64","32bit", "64bit" |
Retourne :
rien.
En cas d'erreur, déclenche une exception.
YAPI.SetDelegate()
ySetDelegate()[YAPI SetDelegate: ]
(Objective-C uniquement) Enregistre un objet délégué qui doit se conformer au protocole YDeviceHotPlug.
m | +(void) SetDelegate | :(id) object |
Les méthodes yDeviceArrival et yDeviceRemoval seront appelées pendant l’exécution de la fonction yUpdateDeviceList, que vous devrez appeler régulièrement.
Paramètres :
| object | un objet qui soit se conformer au protocole YAPIDelegate, ou nil |
YAPI.SetTimeout()
ySetTimeout()ySetTimeout()YAPI.SetTimeout()YAPI.SetTimeout()
Appelle le callback spécifié après un temps d'attente spécifié.
js | function ySetTimeout( | callback, ms_timeout, args) |
nodejs | function SetTimeout( | callback, ms_timeout, arguments) |
es | function SetTimeout( | callback, ms_timeout, args) |
Cette fonction se comporte plus ou moins comme la fonction Javascript setTimeout, mais durant le temps d'attente, elle va appeler yHandleEvents et yUpdateDeviceList périodiquement pour maintenir l'API à jour avec les modules connectés.
Paramètres :
| callback | la fonction à appeler lorsque le temps d'attente est écoulé. Sous Microsoft Internet Explorer, le callback doit être spécifié sous forme d'une string à évaluer. |
| ms_timeout | un entier correspondant à la durée de l'attente, en millisecondes |
| args | des arguments supplémentaires peuvent être fournis, pour être passés à la fonction de callback si nécessaire. |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
YAPI.SetUSBPacketAckMs()
ySetUSBPacketAckMs()YAPI.SetUSBPacketAckMs()
Active la quittance des paquets USB reçus par la librairie Yoctopuce.
java | void SetUSBPacketAckMs( | int pktAckDelay) |
Cette fonction permet à la librairie de fonctionner même sur les téléphones Android qui perdent des paquets USB. Par défaut, la quittance est désactivée, car elle double le nombre de paquets échangés et donc ralentit sensiblement le fonctionnement de L'API. La quittance des paquets USB ne doit donc être activée que sur des tablette ou des téléphones qui posent problème. Un délais de 50 millisecondes est en général suffisant. En cas de doute contacter le support Yoctopuce. Pour désactiver la quittance des paquets USB, appeler cette fonction avec la valeur 0. Note : Cette fonctionnalité est disponible uniquement sous Android.
Paramètres :
| pktAckDelay | nombre de ms avant que le module ne renvoie |
YAPI.Sleep()
ySleep()ySleep()YAPI.Sleep()ySleep()[YAPI Sleep: ]ySleep()ySleep()YAPI.Sleep()YAPI.Sleep()YAPI.Sleep()YAPI.Sleep()ySleep()YAPI.Sleep()
Effectue une pause dans l'exécution du programme pour une durée spécifiée.
js | function ySleep( | ms_duration, errmsg) |
nodejs | function Sleep( | ms_duration, errmsg) |
cpp | YRETCODE ySleep( | unsigned ms_duration, string& errmsg) |
m | +(YRETCODE) Sleep | :(unsigned) ms_duration :(NSError **) errmsg |
pas | function ySleep( | ms_duration: integer, var errmsg: string): integer |
vb | function ySleep( | ByVal ms_duration As Integer, |
| ByRef errmsg As String) As Integer |
cs | int Sleep( | int ms_duration, ref string errmsg) |
java | int Sleep( | long ms_duration) |
uwp | async Task<int> Sleep( | ulong ms_duration) |
py | def Sleep( | ms_duration, errmsg=None) |
php | function ySleep( | $ms_duration, &$errmsg) |
es | function Sleep( | ms_duration, errmsg) |
L'attente est passive, c'est-à-dire qu'elle n'occupe pas significativement le processeur, de sorte à le laisser disponible pour les autres processus fonctionnant sur la machine. Durant l'attente, la librairie va néanmoins continuer à lire périodiquement les informations en provenance des modules Yoctopuce en appelant la fonction yHandleEvents() afin de se maintenir à jour.
Cette fonction peut signaler une erreur au cas à la communication avec un module Yoctopuce ne se passerait pas comme attendu.
Paramètres :
| ms_duration | un entier correspondant à la durée de la pause, en millisecondes |
| errmsg | une chaîne de caractères passée par référence, dans laquelle sera stocké un éventuel message d'erreur. |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
YAPI.TestHub()
yTestHub()yTestHub()[YAPI TestHub: ]yTestHub()yTestHub()YAPI.TestHub()YAPI.TestHub()YAPI.TestHub()YAPI.TestHub()yTestHub()YAPI.TestHub()
Test si un hub est joignable.
cpp | YRETCODE yTestHub( | const string& url, int mstimeout, string& errmsg) |
m | +(YRETCODE) TestHub | : (NSString*) url |
| : (int) mstimeout | ||
| : (NSError**) errmsg |
pas | function yTestHub( | url: string, |
| mstimeout: integer, | ||
| var errmsg: string): integer |
vb | function yTestHub( | ByVal url As String, |
| ByVal mstimeout As Integer, | ||
| ByRef errmsg As String) As Integer |
cs | int TestHub( | string url, int mstimeout, ref string errmsg) |
java | int TestHub( | String url, int mstimeout) |
uwp | async Task<int> TestHub( | string url, uint mstimeout) |
py | def TestHub( | url, mstimeout, errmsg=None) |
php | function yTestHub( | $url, $mstimeout, &$errmsg) |
es | function TestHub( | url, mstimeout) |
Cette méthode n'enregistre pas le hub, elle ne fait que de vérifier que le hub est joignable. Le paramètre url suit les mêmes conventions que la méthode RegisterHub. Cette méthode est utile pour vérifier les paramètres d'authentification d'un hub. Il est possible de forcer la méthode à rendre la main après mstimeout millisecondes.
Paramètres :
| url | une chaîne de caractères contenant "usb","callback", ou l'URL racine du VirtualHub à utiliser. |
| mstimeout | le nombre de millisecondes disponible pour tester la connexion. |
| errmsg | une chaîne de caractères passée par référence, dans laquelle sera stocké un éventuel message d'erreur. |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur retourne un code d'erreur négatif.
YAPI.TriggerHubDiscovery()
yTriggerHubDiscovery()yTriggerHubDiscovery()[YAPI TriggerHubDiscovery: ]yTriggerHubDiscovery()yTriggerHubDiscovery()YAPI.TriggerHubDiscovery()YAPI.TriggerHubDiscovery()YAPI.TriggerHubDiscovery()YAPI.TriggerHubDiscovery()
Relance une détection des hubs réseau.
cpp | YRETCODE yTriggerHubDiscovery( | string& errmsg) |
m | +(YRETCODE) TriggerHubDiscovery | : (NSError**) errmsg |
pas | function yTriggerHubDiscovery( | var errmsg: string): integer |
vb | function yTriggerHubDiscovery( | ByRef errmsg As String) As Integer |
cs | int TriggerHubDiscovery( | ref string errmsg) |
java | int TriggerHubDiscovery( | ) |
uwp | async Task<int> TriggerHubDiscovery( | ) |
py | def TriggerHubDiscovery( | errmsg=None) |
Si une fonction de callback est enregistrée avec yRegisterDeviceRemovalCallback elle sera appelée à chaque hub réseau qui répondra à la détection SSDP.
Paramètres :
| errmsg | une chaîne de caractères passée par référence, dans laquelle sera stocké un éventuel message d'erreur. |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur. En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
YAPI.UnregisterHub()
yUnregisterHub()yUnregisterHub()YAPI.UnregisterHub()yUnregisterHub()[YAPI UnregisterHub: ]yUnregisterHub()yUnregisterHub()YAPI.UnregisterHub()YAPI.UnregisterHub()YAPI.UnregisterHub()YAPI.UnregisterHub()yUnregisterHub()YAPI.UnregisterHub()
Configure la librairie Yoctopuce pour ne plus utiliser les modules connectés sur une machine préalablement enregistrer avec RegisterHub.
js | function yUnregisterHub( | url) |
nodejs | function UnregisterHub( | url) |
cpp | void yUnregisterHub( | const string& url) |
m | +(void) UnregisterHub | :(NSString *) url |
pas | procedure yUnregisterHub( | url: string) |
vb | procedure yUnregisterHub( | ByVal url As String) |
cs | void UnregisterHub( | string url) |
java | void UnregisterHub( | String url) |
uwp | async Task UnregisterHub( | string url) |
py | def UnregisterHub( | url) |
php | function yUnregisterHub( | $url) |
es | function UnregisterHub( | url) |
Paramètres :
| url | une chaîne de caractères contenant "usb" ou |
YAPI.UpdateDeviceList()
yUpdateDeviceList()yUpdateDeviceList()YAPI.UpdateDeviceList()yUpdateDeviceList()[YAPI UpdateDeviceList: ]yUpdateDeviceList()yUpdateDeviceList()YAPI.UpdateDeviceList()YAPI.UpdateDeviceList()YAPI.UpdateDeviceList()YAPI.UpdateDeviceList()yUpdateDeviceList()YAPI.UpdateDeviceList()
Force une mise-à-jour de la liste des modules Yoctopuce connectés.
js | function yUpdateDeviceList( | errmsg) |
nodejs | function UpdateDeviceList( | errmsg) |
cpp | YRETCODE yUpdateDeviceList( | string& errmsg) |
m | +(YRETCODE) UpdateDeviceList | :(NSError**) errmsg |
pas | function yUpdateDeviceList( | var errmsg: string): integer |
vb | function yUpdateDeviceList( | ByRef errmsg As String) As YRETCODE |
cs | YRETCODE UpdateDeviceList( | ref string errmsg) |
java | int UpdateDeviceList( | ) |
uwp | async Task<int> UpdateDeviceList( | ) |
py | def UpdateDeviceList( | errmsg=None) |
php | function yUpdateDeviceList( | &$errmsg) |
es | function UpdateDeviceList( | errmsg) |
La librairie va vérifier sur les machines ou ports USB précédemment enregistrés en utilisant la fonction yRegisterHub si un module a été connecté ou déconnecté, et le cas échéant appeler les fonctions de callback définies par l'utilisateur.
Cette fonction peut être appelée aussi souvent que désiré, afin de rendre l'application réactive aux événements de hot-plug.
Paramètres :
| errmsg | une chaîne de caractères passée par référence, dans laquelle sera stocké un éventuel message d'erreur. |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
YAPI.UpdateDeviceList_async()
yUpdateDeviceList_async()yUpdateDeviceList_async()YAPI.UpdateDeviceList_async()
Force une mise-à-jour de la liste des modules Yoctopuce connectés.
js | function yUpdateDeviceList_async( | callback, context) |
nodejs | function UpdateDeviceList_async( | callback, context) |
La librairie va vérifier sur les machines ou ports USB précédemment enregistrés en utilisant la fonction yRegisterHub si un module a été connecté ou déconnecté, et le cas échéant appeler les fonctions de callback définies par l'utilisateur.
Cette fonction peut être appelée aussi souvent que désiré, afin de rendre l'application réactive aux événements de hot-plug.
Cette version asynchrone n'existe qu'en Javascript. Elle utilise une fonction de callback plutôt qu'une simple valeur de retour, pour éviter de bloquer la VM Javascript de Firefox, qui n'implémente pas le passage de contrôle entre threads durant les appels d'entrée/sortie bloquants.
Paramètres :
| callback | fonction de callback qui sera appelée dès que le résultat sera connu. La fonction callback reçoit deux arguments: le contexte fourni par l'appelant et le code de retour (YAPI_SUCCESS si l'opération se déroule sans erreur). |
| context | contexte fourni par l'appelant, et qui sera passé tel-quel à la fonction de callback |
Retourne :
rien du tout : le résultat sera passé en paramètre à la fonction de callback.
20.2. Interface de contrôle du module
Cette interface est la même pour tous les modules USB de Yoctopuce. Elle permet de contrôler les paramètres généraux du module, et d'énumérer les fonctions fournies par chaque module.
Pour utiliser les fonctions décrites ici, vous devez inclure:
js | <script type='text/javascript' src='yocto_api.js'></script> |
nodejs | var yoctolib = require('yoctolib'); var YAPI = yoctolib.YAPI; var YModule = yoctolib.YModule; |
cpp | #include "yocto_api.h" |
m | #import "yocto_api.h" |
pas | uses yocto_api; |
vb | yocto_api.vb |
cs | yocto_api.cs |
java | import com.yoctopuce.YoctoAPI.YModule; |
uwp | import com.yoctopuce.YoctoAPI.YModule; |
py | from yocto_api import * |
php | require_once('yocto_api.php'); |
es | in HTML: <script src="../../lib/yocto_api.js"></script> in node.js: require('yoctolib-es2017/yocto_api.js'); |
| Fonction globales |
|---|
| yFindModule(func) |
Permet de retrouver un module d'après son numéro de série ou son nom logique. |
| yFindModuleInContext(yctx, func) |
Permet de retrouver un module d'après un identifiant donné dans un Context YAPI. |
| yFirstModule() |
Commence l'énumération des modules accessibles par la librairie. |
| Méthodes des objets YModule |
| module→checkFirmware(path, onlynew) |
Teste si le fichier byn est valide pour le module. |
| module→clearCache() |
Invalide le cache. |
| module→describe() |
Retourne un court texte décrivant le module. |
| module→download(pathname) |
Télécharge le fichier choisi du module et retourne son contenu. |
| module→functionBaseType(functionIndex) |
Retourne le type de base de la nième fonction du module. |
| module→functionCount() |
Retourne le nombre de fonctions (sans compter l'interface "module") existant sur le module. |
| module→functionId(functionIndex) |
Retourne l'identifiant matériel de la nième fonction du module. |
| module→functionName(functionIndex) |
Retourne le nom logique de la nième fonction du module. |
| module→functionType(functionIndex) |
Retourne le type de la nième fonction du module. |
| module→functionValue(functionIndex) |
Retourne la valeur publiée par la nième fonction du module. |
| module→get_allSettings() |
Retourne tous les paramètres de configuration du module. |
| module→get_beacon() |
Retourne l'état de la balise de localisation. |
| module→get_errorMessage() |
Retourne le message correspondant à la dernière erreur survenue lors de l'utilisation de l'objet module. |
| module→get_errorType() |
Retourne le code d'erreur correspondant à la dernière erreur survenue lors de l'utilisation de l'objet module. |
| module→get_firmwareRelease() |
Retourne la version du logiciel embarqué du module. |
| module→get_functionIds(funType) |
Retourne les identifiants matériels des fonctions correspondant au type passé en argument. |
| module→get_hardwareId() |
Retourne l'identifiant unique du module. |
| module→get_icon2d() |
Retourne l'icône du module. |
| module→get_lastLogs() |
Retourne une chaine de charactère contenant les derniers logs du module. |
| module→get_logicalName() |
Retourne le nom logique du module. |
| module→get_luminosity() |
Retourne la luminosité des leds informatives du module (valeur entre 0 et 100). |
| module→get_parentHub() |
Retourne le numéro de série du YoctoHub sur lequel est connecté le module. |
| module→get_persistentSettings() |
Retourne l'état courant des réglages persistents du module. |
| module→get_productId() |
Retourne l'identifiant USB du module, préprogrammé en usine. |
| module→get_productName() |
Retourne le nom commercial du module, préprogrammé en usine. |
| module→get_productRelease() |
Retourne le numéro de version matériel du module, préprogrammé en usine. |
| module→get_rebootCountdown() |
Retourne le nombre de secondes restantes avant un redémarrage du module, ou zéro si aucun redémarrage n'a été agendé. |
| module→get_serialNumber() |
Retourne le numéro de série du module, préprogrammé en usine. |
| module→get_subDevices() |
Retourne la liste des modules branchés au module courant. |
| module→get_upTime() |
Retourne le numbre de millisecondes écoulées depuis la mise sous tension du module |
| module→get_url() |
Retourne l'URL utilisée pour accéder au module. |
| module→get_usbCurrent() |
Retourne le courant consommé par le module sur le bus USB, en milliampères. |
| module→get_userData() |
Retourne le contenu de l'attribut userData, précédemment stocké à l'aide de la méthode set_userData. |
| module→get_userVar() |
Retourne la valeur entière précédemment stockée dans cet attribut. |
| module→hasFunction(funcId) |
Teste la présence d'une fonction pour le module courant. |
| module→isOnline() |
Vérifie si le module est joignable, sans déclencher d'erreur. |
| module→isOnline_async(callback, context) |
Vérifie si le module est joignable, sans déclencher d'erreur. |
| module→load(msValidity) |
Met en cache les valeurs courantes du module, avec une durée de validité spécifiée. |
| module→load_async(msValidity, callback, context) |
Met en cache les valeurs courantes du module, avec une durée de validité spécifiée. |
| module→log(text) |
Ajoute un message arbitraire dans les logs du module. |
| module→nextModule() |
Continue l'énumération des modules commencée à l'aide de yFirstModule(). |
| module→reboot(secBeforeReboot) |
Agende un simple redémarrage du module dans un nombre donné de secondes. |
| module→registerLogCallback(callback) |
Enregistre une fonction de callback qui sera appelée à chaque fois le module émet un message de log. |
| module→revertFromFlash() |
Recharge les réglages stockés dans le mémoire non volatile du module, comme à la mise sous tension du module. |
| module→saveToFlash() |
Sauve les réglages courants dans la mémoire non volatile du module. |
| module→set_allSettings(settings) |
Rétablit tous les paramètres du module. |
| module→set_allSettingsAndFiles(settings) |
Rétablit tous les paramètres de configuration et fichiers sur un module. |
| module→set_beacon(newval) |
Allume ou éteint la balise de localisation du module. |
| module→set_logicalName(newval) |
Change le nom logique du module. |
| module→set_luminosity(newval) |
Modifie la luminosité des leds informatives du module. |
| module→set_userData(data) |
Enregistre un contexte libre dans l'attribut userData de la fonction, afin de le retrouver plus tard à l'aide de la méthode get_userData. |
| module→set_userVar(newval) |
Stocke une valeur 32 bits dans la mémoire volatile du module. |
| module→triggerFirmwareUpdate(secBeforeReboot) |
Agende un redémarrage du module en mode spécial de reprogrammation du logiciel embarqué. |
| module→updateFirmware(path) |
Prepare une mise à jour de firmware du module. |
| module→updateFirmwareEx(path, force) |
Prepare une mise à jour de firmware du module. |
| module→wait_async(callback, context) |
Attend que toutes les commandes asynchrones en cours d'exécution sur le module soient terminées, et appelle le callback passé en paramètre. |
YModule.FindModule()
yFindModule()yFindModule()YModule.FindModule()yFindModule()[YModule FindModule: ]yFindModule()yFindModule()YModule.FindModule()YModule.FindModule()YModule.FindModule()YModule.FindModule()yFindModule()YModule.FindModule()
Permet de retrouver un module d'après son numéro de série ou son nom logique.
js | function yFindModule( | func) |
nodejs | function FindModule( | func) |
cpp | YModule* yFindModule( | string func) |
m | +(YModule*) FindModule | : (NSString*) func |
pas | function yFindModule( | func: string): TYModule |
vb | function yFindModule( | ByVal func As String) As YModule |
cs | YModule FindModule( | string func) |
java | YModule FindModule( | String func) |
uwp | YModule FindModule( | string func) |
py | def FindModule( | func) |
php | function yFindModule( | $func) |
es | function FindModule( | func) |
Cette fonction n'exige pas que le module soit en ligne au moment ou elle est appelée, l'objet retourné sera néanmoins valide. Utiliser la méthode YModule.isOnline() pour tester si le module est utilisable à un moment donné. En cas d'ambiguïté lorsqu'on fait une recherche par nom logique, aucune erreur ne sera notifiée: la première instance trouvée sera renvoyée. La recherche se fait d'abord par nom matériel, puis par nom logique.
Paramètres :
| func | une chaîne de caractères contenant soit le numéro de série, soit le nom logique du module désiré |
Retourne :
un objet de classe YModule qui permet ensuite de contrôler le module ou d'obtenir de plus amples informations sur le module.
YModule.FindModuleInContext()
yFindModuleInContext()YModule.FindModuleInContext()YModule.FindModuleInContext()YModule.FindModuleInContext()
Permet de retrouver un module d'après un identifiant donné dans un Context YAPI.
java | YModule FindModuleInContext( | YAPIContext yctx, String func) |
uwp | YModule FindModuleInContext( | YAPIContext yctx, string func) |
es | function FindModuleInContext( | yctx, func) |
L'identifiant peut être spécifié sous plusieurs formes:
- NomLogiqueFonction
- NoSerieModule.IdentifiantFonction
- NoSerieModule.NomLogiqueFonction
- NomLogiqueModule.IdentifiantMatériel
- NomLogiqueModule.NomLogiqueFonction
Cette fonction n'exige pas que le module soit en ligne au moment ou elle est appelée, l'objet retourné sera néanmoins valide. Utiliser la méthode YModule.isOnline() pour tester si le module est utilisable à un moment donné. En cas d'ambiguïté lorsqu'on fait une recherche par nom logique, aucune erreur ne sera notifiée: la première instance trouvée sera renvoyée. La recherche se fait d'abord par nom matériel, puis par nom logique.
Paramètres :
| yctx | un contexte YAPI |
| func | une chaîne de caractères qui référence le module sans ambiguïté |
Retourne :
un objet de classe YModule qui permet ensuite de contrôler le module.
YModule.FirstModule()
yFirstModule()yFirstModule()YModule.FirstModule()yFirstModule()[YModule FirstModule]yFirstModule()yFirstModule()YModule.FirstModule()YModule.FirstModule()YModule.FirstModule()YModule.FirstModule()yFirstModule()YModule.FirstModule()
Commence l'énumération des modules accessibles par la librairie.
js | function yFirstModule( | ) |
nodejs | function FirstModule( | ) |
cpp | YModule* yFirstModule( | ) |
m | +(YModule*) FirstModule |
pas | function yFirstModule( | ): TYModule |
vb | function yFirstModule( | ) As YModule |
cs | YModule FirstModule( | ) |
java | YModule FirstModule( | ) |
uwp | YModule FirstModule( | ) |
py | def FirstModule( | ) |
php | function yFirstModule( | ) |
es | function FirstModule( | ) |
Utiliser la fonction YModule.nextModule() pour itérer sur les autres modules.
Retourne :
un pointeur sur un objet YModule, correspondant au premier module accessible en ligne, ou null si aucun module n'a été trouvé.
module→checkFirmware()module.checkFirmware()module.checkFirmware()module→checkFirmware()[module checkFirmware: ]module.checkFirmware()module.checkFirmware()module.checkFirmware()module.checkFirmware()module.checkFirmware()module.checkFirmware()module→checkFirmware()module.checkFirmware()YModule checkFirmware
Teste si le fichier byn est valide pour le module.
js | function checkFirmware( | path, onlynew) |
nodejs | function checkFirmware( | path, onlynew) |
cpp | string checkFirmware( | string path, bool onlynew) |
m | -(NSString*) checkFirmware | : (NSString*) path |
| : (bool) onlynew |
pas | function checkFirmware( | path: string, onlynew: boolean): string |
vb | function checkFirmware( | ) As String |
cs | string checkFirmware( | string path, bool onlynew) |
java | String checkFirmware( | String path, boolean onlynew) |
uwp | async Task<string> checkFirmware( | string path, bool onlynew) |
py | def checkFirmware( | path, onlynew) |
php | function checkFirmware( | $path, $onlynew) |
es | function checkFirmware( | path, onlynew) |
cmd | YModule target checkFirmware | path onlynew |
Cette méthode est utile pour vérifier si il est nécessaire de mettre à jour le module avec un nouveau firmware. Il est possible de passer un répertoire qui contiens plusieurs fichier .byn. Dans ce cas cette methode retourne le path du fichier .byn compatible le plus récent. Si le parametre onlynew est vrais, les firmwares équivalents ou plus anciens que le firmware actuellement installé sont ignorés.
Paramètres :
| path | le path d'un fichier .byn ou d'un répertoire contenant plusieurs fichier .byn |
| onlynew | retourne uniquement les fichiers strictement plus récents |
Retourne :
le path du fichier .byn à utiliser, ou une chaîne vide si aucun firmware plus récent n'est disponible En cas d'erreur, déclenche une exception ou retourne une chaine de caractère qui comment par "error:".
module→clearCache()module.clearCache()module.clearCache()module→clearCache()[module clearCache]module.clearCache()module.clearCache()module.clearCache()module.clearCache()module.clearCache()module→clearCache()module.clearCache()
Invalide le cache.
js | function clearCache( | ) |
nodejs | function clearCache( | ) |
cpp | void clearCache( | ) |
m | -(void) clearCache |
pas | procedure clearCache( | ) |
vb | procedure clearCache( | ) |
cs | void clearCache( | ) |
java | void clearCache( | ) |
py | def clearCache( | ) |
php | function clearCache( | ) |
es | function clearCache( | ) |
Invalide le cache des valeurs courantes du module. Force le prochain appel à une méthode get_xxx() ou loadxxx() pour charger les les données depuis le module.
module→describe()module.describe()module.describe()module→describe()[module describe]module.describe()module.describe()module.describe()module.describe()module.describe()module→describe()module.describe()
Retourne un court texte décrivant le module.
js | function describe( | ) |
nodejs | function describe( | ) |
cpp | string describe( | ) |
m | -(NSString*) describe |
pas | function describe( | ): string |
vb | function describe( | ) As String |
cs | string describe( | ) |
java | String describe( | ) |
py | def describe( | ) |
php | function describe( | ) |
es | function describe( | ) |
Ce texte peut contenir soit le nom logique du module, soit son numéro de série.
Retourne :
une chaîne de caractères décrivant le module
module→download()module.download()module.download()module→download()[module download: ]module.download()module.download()module.download()module.download()module.download()module.download()module→download()module.download()YModule download
Télécharge le fichier choisi du module et retourne son contenu.
js | function download( | pathname) |
nodejs | function download( | pathname) |
cpp | string download( | string pathname) |
m | -(NSMutableData*) download | : (NSString*) pathname |
pas | function download( | pathname: string): TByteArray |
vb | function download( | ) As Byte |
cs | byte[] download( | string pathname) |
java | byte[] download( | String pathname) |
uwp | async Task<byte[]> download( | string pathname) |
py | def download( | pathname) |
php | function download( | $pathname) |
es | function download( | pathname) |
cmd | YModule target download | pathname |
Paramètres :
| pathname | nom complet du fichier |
Retourne :
le contenu du fichier chargé
En cas d'erreur, déclenche une exception ou retourne YAPI_INVALID_STRING.
module→functionBaseType()module.functionBaseType()module.functionBaseType()module→functionBaseType()module.functionBaseType()module.functionBaseType()module.functionBaseType()module.functionBaseType()module.functionBaseType()module→functionBaseType()module.functionBaseType()
Retourne le type de base de la nième fonction du module.
js | function functionBaseType( | functionIndex) |
nodejs | function functionBaseType( | functionIndex) |
cpp | string functionBaseType( | int functionIndex) |
pas | function functionBaseType( | functionIndex: integer): string |
vb | function functionBaseType( | ByVal functionIndex As Integer) As String |
cs | string functionBaseType( | int functionIndex) |
java | String functionBaseType( | int functionIndex) |
py | def functionBaseType( | functionIndex) |
php | function functionBaseType( | $functionIndex) |
es | function functionBaseType( | functionIndex) |
Par exemple, le type de base de toutes les fonctions de mesure est "Sensor".
Paramètres :
| functionIndex | l'index de la fonction pour laquelle l'information est désirée, en commençant à 0 pour la première fonction. |
Retourne :
une chaîne de caractères correspondant au type de base de la fonction
En cas d'erreur, déclenche une exception ou retourne un chaîne vide.
module→functionCount()module.functionCount()module.functionCount()module→functionCount()[module functionCount]module.functionCount()module.functionCount()module.functionCount()module.functionCount()module.functionCount()module→functionCount()module.functionCount()
Retourne le nombre de fonctions (sans compter l'interface "module") existant sur le module.
js | function functionCount( | ) |
nodejs | function functionCount( | ) |
cpp | int functionCount( | ) |
m | -(int) functionCount |
pas | function functionCount( | ): integer |
vb | function functionCount( | ) As Integer |
cs | int functionCount( | ) |
java | int functionCount( | ) |
py | def functionCount( | ) |
php | function functionCount( | ) |
es | function functionCount( | ) |
Retourne :
le nombre de fonctions sur le module
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
module→functionId()module.functionId()module.functionId()module→functionId()[module functionId: ]module.functionId()module.functionId()module.functionId()module.functionId()module.functionId()module→functionId()module.functionId()
Retourne l'identifiant matériel de la nième fonction du module.
js | function functionId( | functionIndex) |
nodejs | function functionId( | functionIndex) |
cpp | string functionId( | int functionIndex) |
m | -(NSString*) functionId | : (int) functionIndex |
pas | function functionId( | functionIndex: integer): string |
vb | function functionId( | ByVal functionIndex As Integer) As String |
cs | string functionId( | int functionIndex) |
java | String functionId( | int functionIndex) |
py | def functionId( | functionIndex) |
php | function functionId( | $functionIndex) |
es | function functionId( | functionIndex) |
Paramètres :
| functionIndex | l'index de la fonction pour laquelle l'information est désirée, en commençant à 0 pour la première fonction. |
Retourne :
une chaîne de caractères correspondant à l'identifiant matériel unique de la fonction désirée
En cas d'erreur, déclenche une exception ou retourne un chaîne vide.
module→functionName()module.functionName()module.functionName()module→functionName()[module functionName: ]module.functionName()module.functionName()module.functionName()module.functionName()module.functionName()module→functionName()module.functionName()
Retourne le nom logique de la nième fonction du module.
js | function functionName( | functionIndex) |
nodejs | function functionName( | functionIndex) |
cpp | string functionName( | int functionIndex) |
m | -(NSString*) functionName | : (int) functionIndex |
pas | function functionName( | functionIndex: integer): string |
vb | function functionName( | ByVal functionIndex As Integer) As String |
cs | string functionName( | int functionIndex) |
java | String functionName( | int functionIndex) |
py | def functionName( | functionIndex) |
php | function functionName( | $functionIndex) |
es | function functionName( | functionIndex) |
Paramètres :
| functionIndex | l'index de la fonction pour laquelle l'information est désirée, en commençant à 0 pour la première fonction. |
Retourne :
une chaîne de caractères correspondant au nom logique de la fonction désirée
En cas d'erreur, déclenche une exception ou retourne un chaîne vide.
module→functionType()module.functionType()module.functionType()module→functionType()module.functionType()module.functionType()module.functionType()module.functionType()module.functionType()module→functionType()module.functionType()
Retourne le type de la nième fonction du module.
js | function functionType( | functionIndex) |
nodejs | function functionType( | functionIndex) |
cpp | string functionType( | int functionIndex) |
pas | function functionType( | functionIndex: integer): string |
vb | function functionType( | ByVal functionIndex As Integer) As String |
cs | string functionType( | int functionIndex) |
java | String functionType( | int functionIndex) |
py | def functionType( | functionIndex) |
php | function functionType( | $functionIndex) |
es | function functionType( | functionIndex) |
Paramètres :
| functionIndex | l'index de la fonction pour laquelle l'information est désirée, en commençant à 0 pour la première fonction. |
Retourne :
une chaîne de caractères correspondant au type de la fonction
En cas d'erreur, déclenche une exception ou retourne un chaîne vide.
module→functionValue()module.functionValue()module.functionValue()module→functionValue()[module functionValue: ]module.functionValue()module.functionValue()module.functionValue()module.functionValue()module.functionValue()module→functionValue()module.functionValue()
Retourne la valeur publiée par la nième fonction du module.
js | function functionValue( | functionIndex) |
nodejs | function functionValue( | functionIndex) |
cpp | string functionValue( | int functionIndex) |
m | -(NSString*) functionValue | : (int) functionIndex |
pas | function functionValue( | functionIndex: integer): string |
vb | function functionValue( | ByVal functionIndex As Integer) As String |
cs | string functionValue( | int functionIndex) |
java | String functionValue( | int functionIndex) |
py | def functionValue( | functionIndex) |
php | function functionValue( | $functionIndex) |
es | function functionValue( | functionIndex) |
Paramètres :
| functionIndex | l'index de la fonction pour laquelle l'information est désirée, en commençant à 0 pour la première fonction. |
Retourne :
une chaîne de caractères correspondant à la valeur publiée par la fonction désirée
En cas d'erreur, déclenche une exception ou retourne un chaîne vide.
module→get_allSettings()
module→allSettings()module.get_allSettings()module.get_allSettings()module→get_allSettings()[module allSettings]module.get_allSettings()module.get_allSettings()module.get_allSettings()module.get_allSettings()module.get_allSettings()module.get_allSettings()module→get_allSettings()module.get_allSettings()YModule get_allSettings
Retourne tous les paramètres de configuration du module.
js | function get_allSettings( | ) |
nodejs | function get_allSettings( | ) |
cpp | string get_allSettings( | ) |
m | -(NSMutableData*) allSettings |
pas | function get_allSettings( | ): TByteArray |
vb | function get_allSettings( | ) As Byte |
cs | byte[] get_allSettings( | ) |
java | byte[] get_allSettings( | ) |
uwp | async Task<byte[]> get_allSettings( | ) |
py | def get_allSettings( | ) |
php | function get_allSettings( | ) |
es | function get_allSettings( | ) |
cmd | YModule target get_allSettings |
Utile pour sauvgarder les noms logiques, les calibrations et fichies uploadés d'un module.
Retourne :
un objet binaire avec tous les paramètres
En cas d'erreur, déclenche une exception ou retourne un objet binaire de taille 0.
module→get_beacon()
module→beacon()module.get_beacon()module.get_beacon()module→get_beacon()[module beacon]module.get_beacon()module.get_beacon()module.get_beacon()module.get_beacon()module.get_beacon()module.get_beacon()module→get_beacon()module.get_beacon()YModule get_beacon
Retourne l'état de la balise de localisation.
js | function get_beacon( | ) |
nodejs | function get_beacon( | ) |
cpp | Y_BEACON_enum get_beacon( | ) |
m | -(Y_BEACON_enum) beacon |
pas | function get_beacon( | ): Integer |
vb | function get_beacon( | ) As Integer |
cs | int get_beacon( | ) |
java | int get_beacon( | ) |
uwp | async Task<int> get_beacon( | ) |
py | def get_beacon( | ) |
php | function get_beacon( | ) |
es | function get_beacon( | ) |
cmd | YModule target get_beacon |
Retourne :
soit Y_BEACON_OFF, soit Y_BEACON_ON, selon l'état de la balise de localisation
En cas d'erreur, déclenche une exception ou retourne Y_BEACON_INVALID.
module→get_errorMessage()
module→errorMessage()module.get_errorMessage()module.get_errorMessage()module→get_errorMessage()[module errorMessage]module.get_errorMessage()module.get_errorMessage()module.get_errorMessage()module.get_errorMessage()module.get_errorMessage()module→get_errorMessage()module.get_errorMessage()
Retourne le message correspondant à la dernière erreur survenue lors de l'utilisation de l'objet module.
js | function get_errorMessage( | ) |
nodejs | function get_errorMessage( | ) |
cpp | string get_errorMessage( | ) |
m | -(NSString*) errorMessage |
pas | function get_errorMessage( | ): string |
vb | function get_errorMessage( | ) As String |
cs | string get_errorMessage( | ) |
java | String get_errorMessage( | ) |
py | def get_errorMessage( | ) |
php | function get_errorMessage( | ) |
es | function get_errorMessage( | ) |
Cette méthode est principalement utile lorsque la librairie Yoctopuce est utilisée en désactivant la gestion des exceptions.
Retourne :
une chaîne de caractères correspondant au message de la dernière erreur qui s'est produit lors de l'utilisation du module
module→get_errorType()
module→errorType()module.get_errorType()module.get_errorType()module→get_errorType()module.get_errorType()module.get_errorType()module.get_errorType()module.get_errorType()module.get_errorType()module→get_errorType()module.get_errorType()
Retourne le code d'erreur correspondant à la dernière erreur survenue lors de l'utilisation de l'objet module.
js | function get_errorType( | ) |
nodejs | function get_errorType( | ) |
cpp | YRETCODE get_errorType( | ) |
pas | function get_errorType( | ): YRETCODE |
vb | function get_errorType( | ) As YRETCODE |
cs | YRETCODE get_errorType( | ) |
java | int get_errorType( | ) |
py | def get_errorType( | ) |
php | function get_errorType( | ) |
es | function get_errorType( | ) |
Cette méthode est principalement utile lorsque la librairie Yoctopuce est utilisée en désactivant la gestion des exceptions.
Retourne :
un nombre correspondant au code de la dernière erreur qui s'est produit lors de l'utilisation du module
module→get_firmwareRelease()
module→firmwareRelease()module.get_firmwareRelease()module.get_firmwareRelease()module→get_firmwareRelease()[module firmwareRelease]module.get_firmwareRelease()module.get_firmwareRelease()module.get_firmwareRelease()module.get_firmwareRelease()module.get_firmwareRelease()module.get_firmwareRelease()module→get_firmwareRelease()module.get_firmwareRelease()YModule get_firmwareRelease
Retourne la version du logiciel embarqué du module.
js | function get_firmwareRelease( | ) |
nodejs | function get_firmwareRelease( | ) |
cpp | string get_firmwareRelease( | ) |
m | -(NSString*) firmwareRelease |
pas | function get_firmwareRelease( | ): string |
vb | function get_firmwareRelease( | ) As String |
cs | string get_firmwareRelease( | ) |
java | String get_firmwareRelease( | ) |
uwp | async Task<string> get_firmwareRelease( | ) |
py | def get_firmwareRelease( | ) |
php | function get_firmwareRelease( | ) |
es | function get_firmwareRelease( | ) |
cmd | YModule target get_firmwareRelease |
Retourne :
une chaîne de caractères représentant la version du logiciel embarqué du module
En cas d'erreur, déclenche une exception ou retourne Y_FIRMWARERELEASE_INVALID.
module→get_functionIds()
module→functionIds()module.get_functionIds()module.get_functionIds()module→get_functionIds()[module functionIds: ]module.get_functionIds()module.get_functionIds()module.get_functionIds()module.get_functionIds()module.get_functionIds()module.get_functionIds()module→get_functionIds()module.get_functionIds()YModule get_functionIds
Retourne les identifiants matériels des fonctions correspondant au type passé en argument.
js | function get_functionIds( | funType) |
nodejs | function get_functionIds( | funType) |
cpp | vector<string> get_functionIds( | string funType) |
m | -(NSMutableArray*) functionIds | : (NSString*) funType |
pas | function get_functionIds( | funType: string): TStringArray |
vb | function get_functionIds( | ) As List |
cs | List<string> get_functionIds( | string funType) |
java | ArrayList<String> get_functionIds( | String funType) |
uwp | async Task<List<string>> get_functionIds( | string funType) |
py | def get_functionIds( | funType) |
php | function get_functionIds( | $funType) |
es | function get_functionIds( | funType) |
cmd | YModule target get_functionIds | funType |
Paramètres :
| funType | Le type de fonction (Relay, LightSensor, Voltage,...) |
Retourne :
un tableau de chaînes de caractère.
module→get_hardwareId()
module→hardwareId()module.get_hardwareId()module.get_hardwareId()module→get_hardwareId()[module hardwareId]module.get_hardwareId()module.get_hardwareId()module.get_hardwareId()module.get_hardwareId()module→get_hardwareId()module.get_hardwareId()
Retourne l'identifiant unique du module.
js | function get_hardwareId( | ) |
nodejs | function get_hardwareId( | ) |
cpp | string get_hardwareId( | ) |
m | -(NSString*) hardwareId |
vb | function get_hardwareId( | ) As String |
cs | string get_hardwareId( | ) |
java | String get_hardwareId( | ) |
py | def get_hardwareId( | ) |
php | function get_hardwareId( | ) |
es | function get_hardwareId( | ) |
L'identifiant unique est composé du numéro de série du module suivi de la chaîne ".module".
Retourne :
une chaîne de caractères identifiant la fonction
module→get_icon2d()
module→icon2d()module.get_icon2d()module.get_icon2d()module→get_icon2d()[module icon2d]module.get_icon2d()module.get_icon2d()module.get_icon2d()module.get_icon2d()module.get_icon2d()module.get_icon2d()module→get_icon2d()module.get_icon2d()YModule get_icon2d
Retourne l'icône du module.
js | function get_icon2d( | ) |
nodejs | function get_icon2d( | ) |
cpp | string get_icon2d( | ) |
m | -(NSMutableData*) icon2d |
pas | function get_icon2d( | ): TByteArray |
vb | function get_icon2d( | ) As Byte |
cs | byte[] get_icon2d( | ) |
java | byte[] get_icon2d( | ) |
uwp | async Task<byte[]> get_icon2d( | ) |
py | def get_icon2d( | ) |
php | function get_icon2d( | ) |
es | function get_icon2d( | ) |
cmd | YModule target get_icon2d |
L'icone est au format PNG et a une taille maximale de 1536 octets.
Retourne :
un buffer binaire contenant l'icone, au format png. En cas d'erreur, déclenche une exception ou retourne YAPI_INVALID_STRING.
module→get_lastLogs()
module→lastLogs()module.get_lastLogs()module.get_lastLogs()module→get_lastLogs()[module lastLogs]module.get_lastLogs()module.get_lastLogs()module.get_lastLogs()module.get_lastLogs()module.get_lastLogs()module.get_lastLogs()module→get_lastLogs()module.get_lastLogs()YModule get_lastLogs
Retourne une chaine de charactère contenant les derniers logs du module.
js | function get_lastLogs( | ) |
nodejs | function get_lastLogs( | ) |
cpp | string get_lastLogs( | ) |
m | -(NSString*) lastLogs |
pas | function get_lastLogs( | ): string |
vb | function get_lastLogs( | ) As String |
cs | string get_lastLogs( | ) |
java | String get_lastLogs( | ) |
uwp | async Task<string> get_lastLogs( | ) |
py | def get_lastLogs( | ) |
php | function get_lastLogs( | ) |
es | function get_lastLogs( | ) |
cmd | YModule target get_lastLogs |
Cette méthode retourne les derniers logs qui sont encore stocké dans le module.
Retourne :
une chaîne de caractère contenant les derniers logs du module. En cas d'erreur, déclenche une exception ou retourne YAPI_INVALID_STRING.
module→get_logicalName()
module→logicalName()module.get_logicalName()module.get_logicalName()module→get_logicalName()[module logicalName]module.get_logicalName()module.get_logicalName()module.get_logicalName()module.get_logicalName()module.get_logicalName()module.get_logicalName()module→get_logicalName()module.get_logicalName()YModule get_logicalName
Retourne le nom logique du module.
js | function get_logicalName( | ) |
nodejs | function get_logicalName( | ) |
cpp | string get_logicalName( | ) |
m | -(NSString*) logicalName |
pas | function get_logicalName( | ): string |
vb | function get_logicalName( | ) As String |
cs | string get_logicalName( | ) |
java | String get_logicalName( | ) |
uwp | async Task<string> get_logicalName( | ) |
py | def get_logicalName( | ) |
php | function get_logicalName( | ) |
es | function get_logicalName( | ) |
cmd | YModule target get_logicalName |
Retourne :
une chaîne de caractères représentant le nom logique du module
En cas d'erreur, déclenche une exception ou retourne Y_LOGICALNAME_INVALID.
module→get_luminosity()
module→luminosity()module.get_luminosity()module.get_luminosity()module→get_luminosity()[module luminosity]module.get_luminosity()module.get_luminosity()module.get_luminosity()module.get_luminosity()module.get_luminosity()module.get_luminosity()module→get_luminosity()module.get_luminosity()YModule get_luminosity
Retourne la luminosité des leds informatives du module (valeur entre 0 et 100).
js | function get_luminosity( | ) |
nodejs | function get_luminosity( | ) |
cpp | int get_luminosity( | ) |
m | -(int) luminosity |
pas | function get_luminosity( | ): LongInt |
vb | function get_luminosity( | ) As Integer |
cs | int get_luminosity( | ) |
java | int get_luminosity( | ) |
uwp | async Task<int> get_luminosity( | ) |
py | def get_luminosity( | ) |
php | function get_luminosity( | ) |
es | function get_luminosity( | ) |
cmd | YModule target get_luminosity |
Retourne :
un entier représentant la luminosité des leds informatives du module (valeur entre 0 et 100)
En cas d'erreur, déclenche une exception ou retourne Y_LUMINOSITY_INVALID.
module→get_parentHub()
module→parentHub()module.get_parentHub()module.get_parentHub()module→get_parentHub()[module parentHub]module.get_parentHub()module.get_parentHub()module.get_parentHub()module.get_parentHub()module.get_parentHub()module→get_parentHub()YModule get_parentHub
Retourne le numéro de série du YoctoHub sur lequel est connecté le module.
js | function get_parentHub( | ) |
nodejs | function get_parentHub( | ) |
cpp | string get_parentHub( | ) |
m | -(NSString*) parentHub |
pas | function get_parentHub( | ): string |
vb | function get_parentHub( | ) As String |
cs | string get_parentHub( | ) |
java | String get_parentHub( | ) |
py | def get_parentHub( | ) |
php | function get_parentHub( | ) |
cmd | YModule target get_parentHub |
Si le module est connecté par USB, ou si le module est le YoctoHub racine, une chaîne vide est retournée.
Retourne :
une chaîne de caractères contenant le numéro de série du YoctoHub, ou une chaîne vide.
module→get_persistentSettings()
module→persistentSettings()module.get_persistentSettings()module.get_persistentSettings()module→get_persistentSettings()[module persistentSettings]module.get_persistentSettings()module.get_persistentSettings()module.get_persistentSettings()module.get_persistentSettings()module.get_persistentSettings()module.get_persistentSettings()module→get_persistentSettings()module.get_persistentSettings()YModule get_persistentSettings
Retourne l'état courant des réglages persistents du module.
js | function get_persistentSettings( | ) |
nodejs | function get_persistentSettings( | ) |
cpp | Y_PERSISTENTSETTINGS_enum get_persistentSettings( | ) |
m | -(Y_PERSISTENTSETTINGS_enum) persistentSettings |
pas | function get_persistentSettings( | ): Integer |
vb | function get_persistentSettings( | ) As Integer |
cs | int get_persistentSettings( | ) |
java | int get_persistentSettings( | ) |
uwp | async Task<int> get_persistentSettings( | ) |
py | def get_persistentSettings( | ) |
php | function get_persistentSettings( | ) |
es | function get_persistentSettings( | ) |
cmd | YModule target get_persistentSettings |
Retourne :
une valeur parmi Y_PERSISTENTSETTINGS_LOADED, Y_PERSISTENTSETTINGS_SAVED et Y_PERSISTENTSETTINGS_MODIFIED représentant l'état courant des réglages persistents du module
En cas d'erreur, déclenche une exception ou retourne Y_PERSISTENTSETTINGS_INVALID.
module→get_productId()
module→productId()module.get_productId()module.get_productId()module→get_productId()[module productId]module.get_productId()module.get_productId()module.get_productId()module.get_productId()module.get_productId()module.get_productId()module→get_productId()module.get_productId()YModule get_productId
Retourne l'identifiant USB du module, préprogrammé en usine.
js | function get_productId( | ) |
nodejs | function get_productId( | ) |
cpp | int get_productId( | ) |
m | -(int) productId |
pas | function get_productId( | ): LongInt |
vb | function get_productId( | ) As Integer |
cs | int get_productId( | ) |
java | int get_productId( | ) |
uwp | async Task<int> get_productId( | ) |
py | def get_productId( | ) |
php | function get_productId( | ) |
es | function get_productId( | ) |
cmd | YModule target get_productId |
Retourne :
un entier représentant l'identifiant USB du module, préprogrammé en usine
En cas d'erreur, déclenche une exception ou retourne Y_PRODUCTID_INVALID.
module→get_productName()
module→productName()module.get_productName()module.get_productName()module→get_productName()[module productName]module.get_productName()module.get_productName()module.get_productName()module.get_productName()module.get_productName()module.get_productName()module→get_productName()module.get_productName()YModule get_productName
Retourne le nom commercial du module, préprogrammé en usine.
js | function get_productName( | ) |
nodejs | function get_productName( | ) |
cpp | string get_productName( | ) |
m | -(NSString*) productName |
pas | function get_productName( | ): string |
vb | function get_productName( | ) As String |
cs | string get_productName( | ) |
java | String get_productName( | ) |
uwp | async Task<string> get_productName( | ) |
py | def get_productName( | ) |
php | function get_productName( | ) |
es | function get_productName( | ) |
cmd | YModule target get_productName |
Retourne :
une chaîne de caractères représentant le nom commercial du module, préprogrammé en usine
En cas d'erreur, déclenche une exception ou retourne Y_PRODUCTNAME_INVALID.
module→get_productRelease()
module→productRelease()module.get_productRelease()module.get_productRelease()module→get_productRelease()[module productRelease]module.get_productRelease()module.get_productRelease()module.get_productRelease()module.get_productRelease()module.get_productRelease()module.get_productRelease()module→get_productRelease()module.get_productRelease()YModule get_productRelease
Retourne le numéro de version matériel du module, préprogrammé en usine.
js | function get_productRelease( | ) |
nodejs | function get_productRelease( | ) |
cpp | int get_productRelease( | ) |
m | -(int) productRelease |
pas | function get_productRelease( | ): LongInt |
vb | function get_productRelease( | ) As Integer |
cs | int get_productRelease( | ) |
java | int get_productRelease( | ) |
uwp | async Task<int> get_productRelease( | ) |
py | def get_productRelease( | ) |
php | function get_productRelease( | ) |
es | function get_productRelease( | ) |
cmd | YModule target get_productRelease |
Retourne :
un entier représentant le numéro de version matériel du module, préprogrammé en usine
En cas d'erreur, déclenche une exception ou retourne Y_PRODUCTRELEASE_INVALID.
module→get_rebootCountdown()
module→rebootCountdown()module.get_rebootCountdown()module.get_rebootCountdown()module→get_rebootCountdown()[module rebootCountdown]module.get_rebootCountdown()module.get_rebootCountdown()module.get_rebootCountdown()module.get_rebootCountdown()module.get_rebootCountdown()module.get_rebootCountdown()module→get_rebootCountdown()module.get_rebootCountdown()YModule get_rebootCountdown
Retourne le nombre de secondes restantes avant un redémarrage du module, ou zéro si aucun redémarrage n'a été agendé.
js | function get_rebootCountdown( | ) |
nodejs | function get_rebootCountdown( | ) |
cpp | int get_rebootCountdown( | ) |
m | -(int) rebootCountdown |
pas | function get_rebootCountdown( | ): LongInt |
vb | function get_rebootCountdown( | ) As Integer |
cs | int get_rebootCountdown( | ) |
java | int get_rebootCountdown( | ) |
uwp | async Task<int> get_rebootCountdown( | ) |
py | def get_rebootCountdown( | ) |
php | function get_rebootCountdown( | ) |
es | function get_rebootCountdown( | ) |
cmd | YModule target get_rebootCountdown |
Retourne :
un entier représentant le nombre de secondes restantes avant un redémarrage du module, ou zéro si aucun redémarrage n'a été agendé
En cas d'erreur, déclenche une exception ou retourne Y_REBOOTCOUNTDOWN_INVALID.
module→get_serialNumber()
module→serialNumber()module.get_serialNumber()module.get_serialNumber()module→get_serialNumber()[module serialNumber]module.get_serialNumber()module.get_serialNumber()module.get_serialNumber()module.get_serialNumber()module.get_serialNumber()module.get_serialNumber()module→get_serialNumber()module.get_serialNumber()YModule get_serialNumber
Retourne le numéro de série du module, préprogrammé en usine.
js | function get_serialNumber( | ) |
nodejs | function get_serialNumber( | ) |
cpp | string get_serialNumber( | ) |
m | -(NSString*) serialNumber |
pas | function get_serialNumber( | ): string |
vb | function get_serialNumber( | ) As String |
cs | string get_serialNumber( | ) |
java | String get_serialNumber( | ) |
uwp | async Task<string> get_serialNumber( | ) |
py | def get_serialNumber( | ) |
php | function get_serialNumber( | ) |
es | function get_serialNumber( | ) |
cmd | YModule target get_serialNumber |
Retourne :
une chaîne de caractères représentant le numéro de série du module, préprogrammé en usine
En cas d'erreur, déclenche une exception ou retourne Y_SERIALNUMBER_INVALID.
module→get_subDevices()
module→subDevices()module.get_subDevices()module.get_subDevices()module→get_subDevices()[module subDevices]module.get_subDevices()module.get_subDevices()module.get_subDevices()module.get_subDevices()module.get_subDevices()module→get_subDevices()YModule get_subDevices
Retourne la liste des modules branchés au module courant.
js | function get_subDevices( | ) |
nodejs | function get_subDevices( | ) |
cpp | vector<string> get_subDevices( | ) |
m | -(NSMutableArray*) subDevices |
pas | function get_subDevices( | ): TStringArray |
vb | function get_subDevices( | ) As List |
cs | List<string> get_subDevices( | ) |
java | ArrayList<String> get_subDevices( | ) |
py | def get_subDevices( | ) |
php | function get_subDevices( | ) |
cmd | YModule target get_subDevices |
Cette fonction n'est pertinente que lorsqu'elle appelée pour un YoctoHub ou pour le VirtualHub. Dans le cas contraire, un tableau vide est retourné.
Retourne :
un tableau de chaînes de caractères contenant les numéros de série des sous-modules connectés au module
module→get_upTime()
module→upTime()module.get_upTime()module.get_upTime()module→get_upTime()[module upTime]module.get_upTime()module.get_upTime()module.get_upTime()module.get_upTime()module.get_upTime()module.get_upTime()module→get_upTime()module.get_upTime()YModule get_upTime
Retourne le numbre de millisecondes écoulées depuis la mise sous tension du module
js | function get_upTime( | ) |
nodejs | function get_upTime( | ) |
cpp | s64 get_upTime( | ) |
m | -(s64) upTime |
pas | function get_upTime( | ): int64 |
vb | function get_upTime( | ) As Long |
cs | long get_upTime( | ) |
java | long get_upTime( | ) |
uwp | async Task<long> get_upTime( | ) |
py | def get_upTime( | ) |
php | function get_upTime( | ) |
es | function get_upTime( | ) |
cmd | YModule target get_upTime |
Retourne :
un entier représentant le numbre de millisecondes écoulées depuis la mise sous tension du module
En cas d'erreur, déclenche une exception ou retourne Y_UPTIME_INVALID.
module→get_url()
module→url()module.get_url()module.get_url()module→get_url()[module url]module.get_url()module.get_url()module.get_url()module.get_url()module.get_url()module→get_url()YModule get_url
Retourne l'URL utilisée pour accéder au module.
js | function get_url( | ) |
nodejs | function get_url( | ) |
cpp | string get_url( | ) |
m | -(NSString*) url |
pas | function get_url( | ): string |
vb | function get_url( | ) As String |
cs | string get_url( | ) |
java | String get_url( | ) |
py | def get_url( | ) |
php | function get_url( | ) |
cmd | YModule target get_url |
Si le module est connecté par USB la chaîne de caractère 'usb' est retournée.
Retourne :
une chaîne de caractère contenant l'URL du module.
module→get_usbCurrent()
module→usbCurrent()module.get_usbCurrent()module.get_usbCurrent()module→get_usbCurrent()[module usbCurrent]module.get_usbCurrent()module.get_usbCurrent()module.get_usbCurrent()module.get_usbCurrent()module.get_usbCurrent()module.get_usbCurrent()module→get_usbCurrent()module.get_usbCurrent()YModule get_usbCurrent
Retourne le courant consommé par le module sur le bus USB, en milliampères.
js | function get_usbCurrent( | ) |
nodejs | function get_usbCurrent( | ) |
cpp | int get_usbCurrent( | ) |
m | -(int) usbCurrent |
pas | function get_usbCurrent( | ): LongInt |
vb | function get_usbCurrent( | ) As Integer |
cs | int get_usbCurrent( | ) |
java | int get_usbCurrent( | ) |
uwp | async Task<int> get_usbCurrent( | ) |
py | def get_usbCurrent( | ) |
php | function get_usbCurrent( | ) |
es | function get_usbCurrent( | ) |
cmd | YModule target get_usbCurrent |
Retourne :
un entier représentant le courant consommé par le module sur le bus USB, en milliampères
En cas d'erreur, déclenche une exception ou retourne Y_USBCURRENT_INVALID.
module→get_userData()
module→userData()module.get_userData()module.get_userData()module→get_userData()[module userData]module.get_userData()module.get_userData()module.get_userData()module.get_userData()module.get_userData()module→get_userData()module.get_userData()
Retourne le contenu de l'attribut userData, précédemment stocké à l'aide de la méthode set_userData.
js | function get_userData( | ) |
nodejs | function get_userData( | ) |
cpp | void * get_userData( | ) |
m | -(id) userData |
pas | function get_userData( | ): Tobject |
vb | function get_userData( | ) As Object |
cs | object get_userData( | ) |
java | Object get_userData( | ) |
py | def get_userData( | ) |
php | function get_userData( | ) |
es | function get_userData( | ) |
Cet attribut n'es pas utilisé directement par l'API. Il est à la disposition de l'appelant pour stocker un contexte.
Retourne :
l'objet stocké précédemment par l'appelant.
module→get_userVar()
module→userVar()module.get_userVar()module.get_userVar()module→get_userVar()[module userVar]module.get_userVar()module.get_userVar()module.get_userVar()module.get_userVar()module.get_userVar()module.get_userVar()module→get_userVar()module.get_userVar()YModule get_userVar
Retourne la valeur entière précédemment stockée dans cet attribut.
js | function get_userVar( | ) |
nodejs | function get_userVar( | ) |
cpp | int get_userVar( | ) |
m | -(int) userVar |
pas | function get_userVar( | ): LongInt |
vb | function get_userVar( | ) As Integer |
cs | int get_userVar( | ) |
java | int get_userVar( | ) |
uwp | async Task<int> get_userVar( | ) |
py | def get_userVar( | ) |
php | function get_userVar( | ) |
es | function get_userVar( | ) |
cmd | YModule target get_userVar |
Au démarrage du module (ou après un redémarrage), la valeur est toujours zéro.
Retourne :
un entier représentant la valeur entière précédemment stockée dans cet attribut
En cas d'erreur, déclenche une exception ou retourne Y_USERVAR_INVALID.
module→hasFunction()module.hasFunction()module.hasFunction()module→hasFunction()[module hasFunction: ]module.hasFunction()module.hasFunction()module.hasFunction()module.hasFunction()module.hasFunction()module.hasFunction()module→hasFunction()module.hasFunction()YModule hasFunction
Teste la présence d'une fonction pour le module courant.
js | function hasFunction( | funcId) |
nodejs | function hasFunction( | funcId) |
cpp | bool hasFunction( | string funcId) |
m | -(bool) hasFunction | : (NSString*) funcId |
pas | function hasFunction( | funcId: string): boolean |
vb | function hasFunction( | ) As Boolean |
cs | bool hasFunction( | string funcId) |
java | boolean hasFunction( | String funcId) |
uwp | async Task<bool> hasFunction( | string funcId) |
py | def hasFunction( | funcId) |
php | function hasFunction( | $funcId) |
es | function hasFunction( | funcId) |
cmd | YModule target hasFunction | funcId |
La méthode prend en paramètre l'identifiant de la fonction (relay1, voltage2,...) et retourne un booléen.
Paramètres :
| funcId | identifiant matériel de la fonction |
Retourne :
vrai si le module inclut la fonction demandée
module→isOnline()module.isOnline()module.isOnline()module→isOnline()[module isOnline]module.isOnline()module.isOnline()module.isOnline()module.isOnline()module.isOnline()module→isOnline()module.isOnline()
Vérifie si le module est joignable, sans déclencher d'erreur.
js | function isOnline( | ) |
nodejs | function isOnline( | ) |
cpp | bool isOnline( | ) |
m | -(BOOL) isOnline |
pas | function isOnline( | ): boolean |
vb | function isOnline( | ) As Boolean |
cs | bool isOnline( | ) |
java | boolean isOnline( | ) |
py | def isOnline( | ) |
php | function isOnline( | ) |
es | function isOnline( | ) |
Si les valeurs des attributs du module en cache sont valides au moment de l'appel, le module est considéré joignable. Cette fonction ne cause en aucun cas d'exception, quelle que soit l'erreur qui pourrait se produire lors de la vérification de joignabilité.
Retourne :
true si le module est joignable, false sinon
module→isOnline_async()module.isOnline_async()module.isOnline_async()
Vérifie si le module est joignable, sans déclencher d'erreur.
js | function isOnline_async( | callback, context) |
nodejs | function isOnline_async( | callback, context) |
Si les valeurs des attributs du module en cache sont valides au moment de l'appel, le module est considéré joignable. Cette fonction ne cause en aucun cas d'exception, quelle que soit l'erreur qui pourrait se produire lors de la vérification de joignabilité.
Cette version asynchrone n'existe qu'en Javascript. Elle utilise une fonction de callback plutôt qu'une simple valeur de retour, pour éviter de bloquer la VM Javascript de Firefox, qui n'implémente pas le passage de contrôle entre threads durant les appels d'entrée/sortie bloquants.
Paramètres :
| callback | fonction de callback qui sera appelée dès que le résultat sera connu. La fonction callback reçoit trois arguments: le contexte fourni par l'appelant, l'objet module concerné et le résultat booléen |
| context | contexte fourni par l'appelant, et qui sera passé tel-quel à la fonction de callback |
Retourne :
rien du tout : le résultat sera passé en paramètre à la fonction de callback.
module→load()module.load()module.load()module→load()[module load: ]module.load()module.load()module.load()module.load()module.load()module→load()module.load()
Met en cache les valeurs courantes du module, avec une durée de validité spécifiée.
js | function load( | msValidity) |
nodejs | function load( | msValidity) |
cpp | YRETCODE load( | int msValidity) |
m | -(YRETCODE) load | : (int) msValidity |
pas | function load( | msValidity: integer): YRETCODE |
vb | function load( | ByVal msValidity As Integer) As YRETCODE |
cs | YRETCODE load( | ulong msValidity) |
java | int load( | long msValidity) |
py | def load( | msValidity) |
php | function load( | $msValidity) |
es | function load( | msValidity) |
Par défaut, lorsqu'on accède à un module, tous les attributs des fonctions du module sont automatiquement mises en cache pour la durée standard (5 ms). Cette méthode peut être utilisée pour marquer occasionnellement les données cachées comme valides pour une plus longue période, par exemple dans le but de réduire le trafic réseau.
Paramètres :
| msValidity | un entier correspondant à la durée de validité attribuée aux les paramètres chargés, en millisecondes |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
module→load_async()module.load_async()module.load_async()
Met en cache les valeurs courantes du module, avec une durée de validité spécifiée.
js | function load_async( | msValidity, callback, context) |
nodejs | function load_async( | msValidity, callback, context) |
Par défaut, lorsqu'on accède à un module, tous les attributs des fonctions du module sont automatiquement mises en cache pour la durée standard (5 ms). Cette méthode peut être utilisée pour marquer occasionnellement les données cachées comme valides pour une plus longue période, par exemple dans le but de réduire le trafic réseau.
Cette version asynchrone n'existe qu'en Javascript. Elle utilise une fonction de callback plutôt qu'une simple valeur de retour, pour éviter de bloquer la VM Javascript de Firefox, qui n'implémente pas le passage de contrôle entre threads durant les appels d'entrée/sortie bloquants.
Paramètres :
| msValidity | un entier correspondant à la durée de validité attribuée aux les paramètres chargés, en millisecondes |
| callback | fonction de callback qui sera appelée dès que le résultat sera connu. La fonction callback reçoit trois arguments: le contexte fourni par l'appelant, l'objet module concerné et le code d'erreur (ou YAPI_SUCCESS) |
| context | contexte fourni par l'appelant, et qui sera passé tel-quel à la fonction de callback |
Retourne :
rien du tout : le résultat sera passé en paramètre à la fonction de callback.
module→log()module.log()module.log()module→log()[module log: ]module.log()module.log()module.log()module.log()module.log()module.log()module→log()module.log()YModule log
Ajoute un message arbitraire dans les logs du module.
js | function log( | text) |
nodejs | function log( | text) |
cpp | int log( | string text) |
m | -(int) log | : (NSString*) text |
pas | function log( | text: string): LongInt |
vb | function log( | ) As Integer |
cs | int log( | string text) |
java | int log( | String text) |
uwp | async Task<int> log( | string text) |
py | def log( | text) |
php | function log( | $text) |
es | function log( | text) |
cmd | YModule target log | text |
Cette fonction est utile en particulier pour tracer l'exécution de callbacks HTTP. Si un saut de ligne est désiré après le message, il doit être inclus dans la chaîne de caractère.
Paramètres :
| text | le message à ajouter aux logs du module. |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
module→nextModule()module.nextModule()module.nextModule()module→nextModule()[module nextModule]module.nextModule()module.nextModule()module.nextModule()module.nextModule()module.nextModule()module.nextModule()module→nextModule()module.nextModule()
Continue l'énumération des modules commencée à l'aide de yFirstModule().
js | function nextModule( | ) |
nodejs | function nextModule( | ) |
cpp | YModule * nextModule( | ) |
m | -(YModule*) nextModule |
pas | function nextModule( | ): TYModule |
vb | function nextModule( | ) As YModule |
cs | YModule nextModule( | ) |
java | YModule nextModule( | ) |
uwp | YModule nextModule( | ) |
py | def nextModule( | ) |
php | function nextModule( | ) |
es | function nextModule( | ) |
Retourne :
un pointeur sur un objet YModule accessible en ligne, ou null lorsque l'énumération est terminée.
module→reboot()module.reboot()module.reboot()module→reboot()[module reboot: ]module.reboot()module.reboot()module.reboot()module.reboot()module.reboot()module.reboot()module→reboot()module.reboot()YModule reboot
Agende un simple redémarrage du module dans un nombre donné de secondes.
js | function reboot( | secBeforeReboot) |
nodejs | function reboot( | secBeforeReboot) |
cpp | int reboot( | int secBeforeReboot) |
m | -(int) reboot | : (int) secBeforeReboot |
pas | function reboot( | secBeforeReboot: LongInt): LongInt |
vb | function reboot( | ) As Integer |
cs | int reboot( | int secBeforeReboot) |
java | int reboot( | int secBeforeReboot) |
uwp | async Task<int> reboot( | int secBeforeReboot) |
py | def reboot( | secBeforeReboot) |
php | function reboot( | $secBeforeReboot) |
es | function reboot( | secBeforeReboot) |
cmd | YModule target reboot | secBeforeReboot |
Paramètres :
| secBeforeReboot | nombre de secondes avant de redémarrer |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
module→registerLogCallback()module→registerLogCallback()[module registerLogCallback: ]module.registerLogCallback()module.registerLogCallback()module.registerLogCallback()module.registerLogCallback()
Enregistre une fonction de callback qui sera appelée à chaque fois le module émet un message de log.
cpp | void registerLogCallback( | YModuleLogCallback callback) |
m | -(void) registerLogCallback | : (YModuleLogCallback) callback |
vb | function registerLogCallback( | ByVal callback As YModuleLogCallback) As Integer |
cs | int registerLogCallback( | LogCallback callback) |
java | void registerLogCallback( | LogCallback callback) |
py | def registerLogCallback( | callback) |
Utile pour débugger le fonctionnement d'un module Yoctopuce.
Paramètres :
| callback | la fonction de callback à rappeler, ou un pointeur nul. La fonction de callback doit accepter deux arguments: l'objet module qui a produit un log, un chaîne de caractère qui contiens le log |
module→revertFromFlash()module.revertFromFlash()module.revertFromFlash()module→revertFromFlash()[module revertFromFlash]module.revertFromFlash()module.revertFromFlash()module.revertFromFlash()module.revertFromFlash()module.revertFromFlash()module.revertFromFlash()module→revertFromFlash()module.revertFromFlash()YModule revertFromFlash
Recharge les réglages stockés dans le mémoire non volatile du module, comme à la mise sous tension du module.
js | function revertFromFlash( | ) |
nodejs | function revertFromFlash( | ) |
cpp | int revertFromFlash( | ) |
m | -(int) revertFromFlash |
pas | function revertFromFlash( | ): LongInt |
vb | function revertFromFlash( | ) As Integer |
cs | int revertFromFlash( | ) |
java | int revertFromFlash( | ) |
uwp | async Task<int> revertFromFlash( | ) |
py | def revertFromFlash( | ) |
php | function revertFromFlash( | ) |
es | function revertFromFlash( | ) |
cmd | YModule target revertFromFlash |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
module→saveToFlash()module.saveToFlash()module.saveToFlash()module→saveToFlash()[module saveToFlash]module.saveToFlash()module.saveToFlash()module.saveToFlash()module.saveToFlash()module.saveToFlash()module.saveToFlash()module→saveToFlash()module.saveToFlash()YModule saveToFlash
Sauve les réglages courants dans la mémoire non volatile du module.
js | function saveToFlash( | ) |
nodejs | function saveToFlash( | ) |
cpp | int saveToFlash( | ) |
m | -(int) saveToFlash |
pas | function saveToFlash( | ): LongInt |
vb | function saveToFlash( | ) As Integer |
cs | int saveToFlash( | ) |
java | int saveToFlash( | ) |
uwp | async Task<int> saveToFlash( | ) |
py | def saveToFlash( | ) |
php | function saveToFlash( | ) |
es | function saveToFlash( | ) |
cmd | YModule target saveToFlash |
Attention le nombre total de sauvegardes possibles durant la vie du module est limité (environ 100000 cycles). N'appelez pas cette fonction dans une boucle.
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
module→set_allSettings()
module→setAllSettings()module.set_allSettings()module.set_allSettings()module→set_allSettings()[module setAllSettings: ]module.set_allSettings()module.set_allSettings()module.set_allSettings()module.set_allSettings()module.set_allSettings()module.set_allSettings()module→set_allSettings()module.set_allSettings()YModule set_allSettings
Rétablit tous les paramètres du module.
js | function set_allSettings( | settings) |
nodejs | function set_allSettings( | settings) |
cpp | int set_allSettings( | string settings) |
m | -(int) setAllSettings | : (NSData*) settings |
pas | function set_allSettings( | settings: TByteArray): LongInt |
vb | procedure set_allSettings( | ) |
cs | int set_allSettings( | ) |
java | int set_allSettings( | byte[] settings) |
uwp | async Task<int> set_allSettings( | ) |
py | def set_allSettings( | settings) |
php | function set_allSettings( | $settings) |
es | function set_allSettings( | settings) |
cmd | YModule target set_allSettings | settings |
Utile pour restorer les noms logiques et les calibrations du module depuis une sauvgarde. N'oubliez pas d'appeler la méthode saveToFlash() du module si les réglages doivent être préservés.
Paramètres :
| settings | un objet binaire avec touts les paramètres |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
module→set_allSettingsAndFiles()
module→setAllSettingsAndFiles()module.set_allSettingsAndFiles()module.set_allSettingsAndFiles()module→set_allSettingsAndFiles()[module setAllSettingsAndFiles: ]module.set_allSettingsAndFiles()module.set_allSettingsAndFiles()module.set_allSettingsAndFiles()module.set_allSettingsAndFiles()module.set_allSettingsAndFiles()module.set_allSettingsAndFiles()module→set_allSettingsAndFiles()module.set_allSettingsAndFiles()YModule set_allSettingsAndFiles
Rétablit tous les paramètres de configuration et fichiers sur un module.
js | function set_allSettingsAndFiles( | settings) |
nodejs | function set_allSettingsAndFiles( | settings) |
cpp | int set_allSettingsAndFiles( | string settings) |
m | -(int) setAllSettingsAndFiles | : (NSData*) settings |
pas | function set_allSettingsAndFiles( | settings: TByteArray): LongInt |
vb | procedure set_allSettingsAndFiles( | ) |
cs | int set_allSettingsAndFiles( | ) |
java | int set_allSettingsAndFiles( | byte[] settings) |
uwp | async Task<int> set_allSettingsAndFiles( | ) |
py | def set_allSettingsAndFiles( | settings) |
php | function set_allSettingsAndFiles( | $settings) |
es | function set_allSettingsAndFiles( | settings) |
cmd | YModule target set_allSettingsAndFiles | settings |
Cette méthode est utile pour récupérer les noms logiques, les calibrations, les fichiers uploadés, etc. du module depuis une sauvgarde. N'oubliez pas d'appeler la méthode saveToFlash() du module si les réglages doivent être préservés.
Paramètres :
| settings | un buffer binaire avec touts les paramètres |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
module→set_beacon()
module→setBeacon()module.set_beacon()module.set_beacon()module→set_beacon()[module setBeacon: ]module.set_beacon()module.set_beacon()module.set_beacon()module.set_beacon()module.set_beacon()module.set_beacon()module→set_beacon()module.set_beacon()YModule set_beacon
Allume ou éteint la balise de localisation du module.
js | function set_beacon( | newval) |
nodejs | function set_beacon( | newval) |
cpp | int set_beacon( | Y_BEACON_enum newval) |
m | -(int) setBeacon | : (Y_BEACON_enum) newval |
pas | function set_beacon( | newval: Integer): integer |
vb | function set_beacon( | ByVal newval As Integer) As Integer |
cs | int set_beacon( | int newval) |
java | int set_beacon( | int newval) |
uwp | async Task<int> set_beacon( | int newval) |
py | def set_beacon( | newval) |
php | function set_beacon( | $newval) |
es | function set_beacon( | newval) |
cmd | YModule target set_beacon | newval |
Paramètres :
| newval | soit Y_BEACON_OFF, soit Y_BEACON_ON |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
module→set_logicalName()
module→setLogicalName()module.set_logicalName()module.set_logicalName()module→set_logicalName()[module setLogicalName: ]module.set_logicalName()module.set_logicalName()module.set_logicalName()module.set_logicalName()module.set_logicalName()module.set_logicalName()module→set_logicalName()module.set_logicalName()YModule set_logicalName
Change le nom logique du module.
js | function set_logicalName( | newval) |
nodejs | function set_logicalName( | newval) |
cpp | int set_logicalName( | const string& newval) |
m | -(int) setLogicalName | : (NSString*) newval |
pas | function set_logicalName( | newval: string): integer |
vb | function set_logicalName( | ByVal newval As String) As Integer |
cs | int set_logicalName( | string newval) |
java | int set_logicalName( | String newval) |
uwp | async Task<int> set_logicalName( | string newval) |
py | def set_logicalName( | newval) |
php | function set_logicalName( | $newval) |
es | function set_logicalName( | newval) |
cmd | YModule target set_logicalName | newval |
Vous pouvez utiliser yCheckLogicalName() pour vérifier si votre paramètre est valide. N'oubliez pas d'appeler la méthode saveToFlash() du module si le réglage doit être préservé.
Paramètres :
| newval | une chaîne de caractères |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
module→set_luminosity()
module→setLuminosity()module.set_luminosity()module.set_luminosity()module→set_luminosity()[module setLuminosity: ]module.set_luminosity()module.set_luminosity()module.set_luminosity()module.set_luminosity()module.set_luminosity()module.set_luminosity()module→set_luminosity()module.set_luminosity()YModule set_luminosity
Modifie la luminosité des leds informatives du module.
js | function set_luminosity( | newval) |
nodejs | function set_luminosity( | newval) |
cpp | int set_luminosity( | int newval) |
m | -(int) setLuminosity | : (int) newval |
pas | function set_luminosity( | newval: LongInt): integer |
vb | function set_luminosity( | ByVal newval As Integer) As Integer |
cs | int set_luminosity( | int newval) |
java | int set_luminosity( | int newval) |
uwp | async Task<int> set_luminosity( | int newval) |
py | def set_luminosity( | newval) |
php | function set_luminosity( | $newval) |
es | function set_luminosity( | newval) |
cmd | YModule target set_luminosity | newval |
Le paramêtre est une valeur entre 0 et 100. N'oubliez pas d'appeler la méthode saveToFlash() du module si le réglage doit être préservé.
Paramètres :
| newval | un entier représentant la luminosité des leds informatives du module |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
module→set_userData()
module→setUserData()module.set_userData()module.set_userData()module→set_userData()[module setUserData: ]module.set_userData()module.set_userData()module.set_userData()module.set_userData()module.set_userData()module→set_userData()module.set_userData()
Enregistre un contexte libre dans l'attribut userData de la fonction, afin de le retrouver plus tard à l'aide de la méthode get_userData.
js | function set_userData( | data) |
nodejs | function set_userData( | data) |
cpp | void set_userData( | void* data) |
m | -(void) setUserData | : (id) data |
pas | procedure set_userData( | data: Tobject) |
vb | procedure set_userData( | ByVal data As Object) |
cs | void set_userData( | object data) |
java | void set_userData( | Object data) |
py | def set_userData( | data) |
php | function set_userData( | $data) |
es | function set_userData( | data) |
Cet attribut n'es pas utilisé directement par l'API. Il est à la disposition de l'appelant pour stocker un contexte.
Paramètres :
| data | objet quelconque à mémoriser |
module→set_userVar()
module→setUserVar()module.set_userVar()module.set_userVar()module→set_userVar()[module setUserVar: ]module.set_userVar()module.set_userVar()module.set_userVar()module.set_userVar()module.set_userVar()module.set_userVar()module→set_userVar()module.set_userVar()YModule set_userVar
Stocke une valeur 32 bits dans la mémoire volatile du module.
js | function set_userVar( | newval) |
nodejs | function set_userVar( | newval) |
cpp | int set_userVar( | int newval) |
m | -(int) setUserVar | : (int) newval |
pas | function set_userVar( | newval: LongInt): integer |
vb | function set_userVar( | ByVal newval As Integer) As Integer |
cs | int set_userVar( | int newval) |
java | int set_userVar( | int newval) |
uwp | async Task<int> set_userVar( | int newval) |
py | def set_userVar( | newval) |
php | function set_userVar( | $newval) |
es | function set_userVar( | newval) |
cmd | YModule target set_userVar | newval |
Cet attribut est à la disposition du programmeur pour y stocker par exemple une variable d'état. Au démarrage du module (ou après un redémarrage), la valeur est toujours zéro.
Paramètres :
| newval | un entier |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
module→triggerFirmwareUpdate()module.triggerFirmwareUpdate()module.triggerFirmwareUpdate()module→triggerFirmwareUpdate()[module triggerFirmwareUpdate: ]module.triggerFirmwareUpdate()module.triggerFirmwareUpdate()module.triggerFirmwareUpdate()module.triggerFirmwareUpdate()module.triggerFirmwareUpdate()module.triggerFirmwareUpdate()module→triggerFirmwareUpdate()module.triggerFirmwareUpdate()YModule triggerFirmwareUpdate
Agende un redémarrage du module en mode spécial de reprogrammation du logiciel embarqué.
js | function triggerFirmwareUpdate( | secBeforeReboot) |
nodejs | function triggerFirmwareUpdate( | secBeforeReboot) |
cpp | int triggerFirmwareUpdate( | int secBeforeReboot) |
m | -(int) triggerFirmwareUpdate | : (int) secBeforeReboot |
pas | function triggerFirmwareUpdate( | secBeforeReboot: LongInt): LongInt |
vb | function triggerFirmwareUpdate( | ) As Integer |
cs | int triggerFirmwareUpdate( | int secBeforeReboot) |
java | int triggerFirmwareUpdate( | int secBeforeReboot) |
uwp | async Task<int> triggerFirmwareUpdate( | int secBeforeReboot) |
py | def triggerFirmwareUpdate( | secBeforeReboot) |
php | function triggerFirmwareUpdate( | $secBeforeReboot) |
es | function triggerFirmwareUpdate( | secBeforeReboot) |
cmd | YModule target triggerFirmwareUpdate | secBeforeReboot |
Paramètres :
| secBeforeReboot | nombre de secondes avant de redémarrer |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
module→updateFirmware()module.updateFirmware()module.updateFirmware()module→updateFirmware()[module updateFirmware: ]module.updateFirmware()module.updateFirmware()module.updateFirmware()module.updateFirmware()module.updateFirmware()module.updateFirmware()module→updateFirmware()module.updateFirmware()YModule updateFirmware
Prepare une mise à jour de firmware du module.
js | function updateFirmware( | path) |
nodejs | function updateFirmware( | path) |
cpp | YFirmwareUpdate updateFirmware( | string path) |
m | -(YFirmwareUpdate*) updateFirmware | : (NSString*) path |
pas | function updateFirmware( | path: string): TYFirmwareUpdate |
vb | function updateFirmware( | ) As YFirmwareUpdate |
cs | YFirmwareUpdate updateFirmware( | string path) |
java | YFirmwareUpdate updateFirmware( | String path) |
uwp | async Task<YFirmwareUpdate> updateFirmware( | string path) |
py | def updateFirmware( | path) |
php | function updateFirmware( | $path) |
es | function updateFirmware( | path) |
cmd | YModule target updateFirmware | path |
Cette méthode retourne un object YFirmwareUpdate qui est utilisé pour mettre à jour le firmware du module.
Paramètres :
| path | le path du fichier .byn à utiliser |
Retourne :
un object YFirmwareUpdate ou NULL en cas d'erreur
module→updateFirmwareEx()module.updateFirmwareEx()module.updateFirmwareEx()module→updateFirmwareEx()[module updateFirmwareEx: ]module.updateFirmwareEx()module.updateFirmwareEx()module.updateFirmwareEx()module.updateFirmwareEx()module.updateFirmwareEx()module.updateFirmwareEx()module→updateFirmwareEx()module.updateFirmwareEx()YModule updateFirmwareEx
Prepare une mise à jour de firmware du module.
js | function updateFirmwareEx( | path, force) |
nodejs | function updateFirmwareEx( | path, force) |
cpp | YFirmwareUpdate updateFirmwareEx( | string path, bool force) |
m | -(YFirmwareUpdate*) updateFirmwareEx | : (NSString*) path |
| : (bool) force |
pas | function updateFirmwareEx( | path: string, force: boolean): TYFirmwareUpdate |
vb | function updateFirmwareEx( | ) As YFirmwareUpdate |
cs | YFirmwareUpdate updateFirmwareEx( | string path, bool force) |
java | YFirmwareUpdate updateFirmwareEx( | String path, boolean force) |
uwp | async Task<YFirmwareUpdate> updateFirmwareEx( | string path, |
| bool force) |
py | def updateFirmwareEx( | path, force) |
php | function updateFirmwareEx( | $path, $force) |
es | function updateFirmwareEx( | path, force) |
cmd | YModule target updateFirmwareEx | path force |
Cette méthode retourne un object YFirmwareUpdate qui est utilisé pour mettre à jour le firmware du module.
Paramètres :
| path | le path du fichier .byn à utiliser |
| force | vrai pour forceer la mise à jour même si un prérequis ne semble pas satisfait |
Retourne :
un object YFirmwareUpdate ou NULL en cas d'erreur
module→wait_async()module.wait_async()module.wait_async()module.wait_async()
Attend que toutes les commandes asynchrones en cours d'exécution sur le module soient terminées, et appelle le callback passé en paramètre.
js | function wait_async( | callback, context) |
nodejs | function wait_async( | callback, context) |
es | function wait_async( | callback, context) |
La fonction callback peut donc librement utiliser des fonctions synchrones ou asynchrones, sans risquer de bloquer la machine virtuelle Javascript.
Paramètres :
| callback | fonction de callback qui sera appelée dès que toutes les commandes en cours d'exécution sur le module seront terminées La fonction callback reçoit deux arguments: le contexte fourni par l'appelant et l'objet fonction concerné. |
| context | contexte fourni par l'appelant, et qui sera passé tel-quel à la fonction de callback |
Retourne :
rien du tout.
20.3. Interface de la fonction ColorLed
La librairie de programmation Yoctopuce permet de piloter une LED couleur aussi bien en coordonnées RGB qu'en coordonnées HSL, les conversions RGB vers HSL étant faites automatiquement par le module. Ceci permet aisément d'allumer la LED avec une certaine teinte et d'en faire progressivement varier la saturation ou la luminosité. Si nécessaire, vous trouverez plus d'information sur la différence entre RGB et HSL dans la section suivante.
Pour utiliser les fonctions décrites ici, vous devez inclure:
js | <script type='text/javascript' src='yocto_colorled.js'></script> |
nodejs | var yoctolib = require('yoctolib'); var YColorLed = yoctolib.YColorLed; |
cpp | #include "yocto_colorled.h" |
m | #import "yocto_colorled.h" |
pas | uses yocto_colorled; |
vb | yocto_colorled.vb |
cs | yocto_colorled.cs |
java | import com.yoctopuce.YoctoAPI.YColorLed; |
uwp | import com.yoctopuce.YoctoAPI.YColorLed; |
py | from yocto_colorled import * |
php | require_once('yocto_colorled.php'); |
es | in HTML: <script src="../../lib/yocto_colorled.js"></script> in node.js: require('yoctolib-es2017/yocto_colorled.js'); |
| Fonction globales |
|---|
| yFindColorLed(func) |
Permet de retrouver une LED RGB d'après un identifiant donné. |
| yFindColorLedInContext(yctx, func) |
Permet de retrouver une LED RGB d'après un identifiant donné dans un Context YAPI. |
| yFirstColorLed() |
Commence l'énumération des LEDs RGB accessibles par la librairie. |
| yFirstColorLedInContext(yctx) |
Commence l'énumération des LEDs RGB accessibles par la librairie. |
| Méthodes des objets YColorLed |
| colorled→addHslMoveToBlinkSeq(HSLcolor, msDelay) |
Ajoute une transition à la séquence de clignotement du module, la transition s'effectuera dans l'espace de couleur HSL. |
| colorled→addRgbMoveToBlinkSeq(RGBcolor, msDelay) |
Ajoute une transition à la séquence de clignotement du module, la transition s'effectuera dans l'espace de couleur RGB |
| colorled→clearCache() |
Invalide le cache. |
| colorled→describe() |
Retourne un court texte décrivant de manière non-ambigüe l'instance de la LED RGB au format TYPE(NAME)=SERIAL.FUNCTIONID. |
| colorled→get_advertisedValue() |
Retourne la valeur courante de la LED RGB (pas plus de 6 caractères). |
| colorled→get_blinkSeqMaxSize() |
Retourne la longueur maximum de la sequence de clignotement. |
| colorled→get_blinkSeqSignature() |
Retourne la signature de la signature de la séquence de clignotement. |
| colorled→get_blinkSeqSize() |
Retourne la longueur actuelle de la sequence de clignotement. |
| colorled→get_errorMessage() |
Retourne le message correspondant à la dernière erreur survenue lors de l'utilisation de la LED RGB. |
| colorled→get_errorType() |
Retourne le code d'erreur correspondant à la dernière erreur survenue lors de l'utilisation de la LED RGB. |
| colorled→get_friendlyName() |
Retourne un identifiant global de la LED RGB au format NOM_MODULE.NOM_FONCTION. |
| colorled→get_functionDescriptor() |
Retourne un identifiant unique de type YFUN_DESCR correspondant à la fonction. |
| colorled→get_functionId() |
Retourne l'identifiant matériel de la LED RGB, sans référence au module. |
| colorled→get_hardwareId() |
Retourne l'identifiant matériel unique de la LED RGB au format SERIAL.FUNCTIONID. |
| colorled→get_hslColor() |
Retourne la couleur HSL courante de la LED. |
| colorled→get_logicalName() |
Retourne le nom logique de la LED RGB. |
| colorled→get_module() |
Retourne l'objet YModule correspondant au module Yoctopuce qui héberge la fonction. |
| colorled→get_module_async(callback, context) |
Retourne l'objet YModule correspondant au module Yoctopuce qui héberge la fonction. |
| colorled→get_rgbColor() |
Retourne la couleur RGB courante de la LED. |
| colorled→get_rgbColorAtPowerOn() |
Retourne la couleur configurée pour être affichage à l'allumage du module. |
| colorled→get_userData() |
Retourne le contenu de l'attribut userData, précédemment stocké à l'aide de la méthode set_userData. |
| colorled→hslMove(hsl_target, ms_duration) |
Effectue une transition continue dans l'espace HSL entre la couleur courante et une nouvelle couleur. |
| colorled→isOnline() |
Vérifie si le module hébergeant la LED RGB est joignable, sans déclencher d'erreur. |
| colorled→isOnline_async(callback, context) |
Vérifie si le module hébergeant la LED RGB est joignable, sans déclencher d'erreur. |
| colorled→load(msValidity) |
Met en cache les valeurs courantes de la LED RGB, avec une durée de validité spécifiée. |
| colorled→loadAttribute(attrName) |
Retourne la valeur actuelle d'un attribut spécifique de la fonction, sous forme de texte, le plus rapidement possible mais sans passer par le cache. |
| colorled→load_async(msValidity, callback, context) |
Met en cache les valeurs courantes de la LED RGB, avec une durée de validité spécifiée. |
| colorled→muteValueCallbacks() |
Désactive l'envoi de chaque changement de la valeur publiée au hub parent. |
| colorled→nextColorLed() |
Continue l'énumération des LEDs RGB commencée à l'aide de yFirstColorLed(). |
| colorled→registerValueCallback(callback) |
Enregistre la fonction de callback qui est appelée à chaque changement de la valeur publiée. |
| colorled→resetBlinkSeq() |
efface le contenu de la sequence de clignotement. |
| colorled→rgbMove(rgb_target, ms_duration) |
Effectue une transition continue dans l'espace RGB entre la couleur courante et une nouvelle couleur. |
| colorled→set_hslColor(newval) |
Modifie la couleur courante de la LED, en utilisant une couleur HSL spécifiée. |
| colorled→set_logicalName(newval) |
Modifie le nom logique de la LED RGB. |
| colorled→set_rgbColor(newval) |
Modifie la couleur courante de la LED, en utilisant une couleur RGB (Rouge Vert Bleu). |
| colorled→set_rgbColorAtPowerOn(newval) |
Modifie la couleur que la LED va afficher à l'allumage du module. |
| colorled→set_userData(data) |
Enregistre un contexte libre dans l'attribut userData de la fonction, afin de le retrouver plus tard à l'aide de la méthode get_userData. |
| colorled→startBlinkSeq() |
Démarre l'exécution de la séquence préprogrammée de clignotement. |
| colorled→stopBlinkSeq() |
Arrête l'exécution de la séquence préprogrammée de clignotement. |
| colorled→unmuteValueCallbacks() |
Réactive l'envoi de chaque changement de la valeur publiée au hub parent. |
| colorled→wait_async(callback, context) |
Attend que toutes les commandes asynchrones en cours d'exécution sur le module soient terminées, et appelle le callback passé en paramètre. |
YColorLed.FindColorLed()
yFindColorLed()yFindColorLed()YColorLed.FindColorLed()yFindColorLed()[YColorLed FindColorLed: ]yFindColorLed()yFindColorLed()YColorLed.FindColorLed()YColorLed.FindColorLed()YColorLed.FindColorLed()YColorLed.FindColorLed()yFindColorLed()YColorLed.FindColorLed()
Permet de retrouver une LED RGB d'après un identifiant donné.
js | function yFindColorLed( | func) |
nodejs | function FindColorLed( | func) |
cpp | YColorLed* yFindColorLed( | string func) |
m | +(YColorLed*) FindColorLed | : (NSString*) func |
pas | function yFindColorLed( | func: string): TYColorLed |
vb | function yFindColorLed( | ByVal func As String) As YColorLed |
cs | YColorLed FindColorLed( | string func) |
java | YColorLed FindColorLed( | String func) |
uwp | YColorLed FindColorLed( | string func) |
py | def FindColorLed( | func) |
php | function yFindColorLed( | $func) |
es | function FindColorLed( | func) |
L'identifiant peut être spécifié sous plusieurs formes:
- NomLogiqueFonction
- NoSerieModule.IdentifiantFonction
- NoSerieModule.NomLogiqueFonction
- NomLogiqueModule.IdentifiantMatériel
- NomLogiqueModule.NomLogiqueFonction
Cette fonction n'exige pas que la LED RGB soit en ligne au moment ou elle est appelée, l'objet retourné sera néanmoins valide. Utiliser la méthode YColorLed.isOnline() pour tester si la LED RGB est utilisable à un moment donné. En cas d'ambiguïté lorsqu'on fait une recherche par nom logique, aucune erreur ne sera notifiée: la première instance trouvée sera renvoyée. La recherche se fait d'abord par nom matériel, puis par nom logique.
Paramètres :
| func | une chaîne de caractères qui référence la LED RGB sans ambiguïté |
Retourne :
un objet de classe YColorLed qui permet ensuite de contrôler la LED RGB.
YColorLed.FindColorLedInContext()
yFindColorLedInContext()YColorLed.FindColorLedInContext()YColorLed.FindColorLedInContext()YColorLed.FindColorLedInContext()
Permet de retrouver une LED RGB d'après un identifiant donné dans un Context YAPI.
java | YColorLed FindColorLedInContext( | YAPIContext yctx, String func) |
uwp | YColorLed FindColorLedInContext( | YAPIContext yctx, string func) |
es | function FindColorLedInContext( | yctx, func) |
L'identifiant peut être spécifié sous plusieurs formes:
- NomLogiqueFonction
- NoSerieModule.IdentifiantFonction
- NoSerieModule.NomLogiqueFonction
- NomLogiqueModule.IdentifiantMatériel
- NomLogiqueModule.NomLogiqueFonction
Cette fonction n'exige pas que la LED RGB soit en ligne au moment ou elle est appelée, l'objet retourné sera néanmoins valide. Utiliser la méthode YColorLed.isOnline() pour tester si la LED RGB est utilisable à un moment donné. En cas d'ambiguïté lorsqu'on fait une recherche par nom logique, aucune erreur ne sera notifiée: la première instance trouvée sera renvoyée. La recherche se fait d'abord par nom matériel, puis par nom logique.
Paramètres :
| yctx | un contexte YAPI |
| func | une chaîne de caractères qui référence la LED RGB sans ambiguïté |
Retourne :
un objet de classe YColorLed qui permet ensuite de contrôler la LED RGB.
YColorLed.FirstColorLed()
yFirstColorLed()yFirstColorLed()YColorLed.FirstColorLed()yFirstColorLed()[YColorLed FirstColorLed]yFirstColorLed()yFirstColorLed()YColorLed.FirstColorLed()YColorLed.FirstColorLed()YColorLed.FirstColorLed()YColorLed.FirstColorLed()yFirstColorLed()YColorLed.FirstColorLed()
Commence l'énumération des LEDs RGB accessibles par la librairie.
js | function yFirstColorLed( | ) |
nodejs | function FirstColorLed( | ) |
cpp | YColorLed* yFirstColorLed( | ) |
m | +(YColorLed*) FirstColorLed |
pas | function yFirstColorLed( | ): TYColorLed |
vb | function yFirstColorLed( | ) As YColorLed |
cs | YColorLed FirstColorLed( | ) |
java | YColorLed FirstColorLed( | ) |
uwp | YColorLed FirstColorLed( | ) |
py | def FirstColorLed( | ) |
php | function yFirstColorLed( | ) |
es | function FirstColorLed( | ) |
Utiliser la fonction YColorLed.nextColorLed() pour itérer sur les autres LEDs RGB.
Retourne :
un pointeur sur un objet YColorLed, correspondant à la première LED RGB accessible en ligne, ou null si il n'y a pas de LEDs RGB disponibles.
YColorLed.FirstColorLedInContext()
yFirstColorLedInContext()YColorLed.FirstColorLedInContext()YColorLed.FirstColorLedInContext()YColorLed.FirstColorLedInContext()
Commence l'énumération des LEDs RGB accessibles par la librairie.
java | YColorLed FirstColorLedInContext( | YAPIContext yctx) |
uwp | YColorLed FirstColorLedInContext( | YAPIContext yctx) |
es | function FirstColorLedInContext( | yctx) |
Utiliser la fonction YColorLed.nextColorLed() pour itérer sur les autres LEDs RGB.
Paramètres :
| yctx | un contexte YAPI. |
Retourne :
un pointeur sur un objet YColorLed, correspondant à la première LED RGB accessible en ligne, ou null si il n'y a pas de LEDs RGB disponibles.
colorled→addHslMoveToBlinkSeq()colorled.addHslMoveToBlinkSeq()colorled.addHslMoveToBlinkSeq()colorled→addHslMoveToBlinkSeq()[colorled addHslMoveToBlinkSeq: ]colorled.addHslMoveToBlinkSeq()colorled.addHslMoveToBlinkSeq()colorled.addHslMoveToBlinkSeq()colorled.addHslMoveToBlinkSeq()colorled.addHslMoveToBlinkSeq()colorled.addHslMoveToBlinkSeq()colorled→addHslMoveToBlinkSeq()colorled.addHslMoveToBlinkSeq()YColorLed addHslMoveToBlinkSeq
Ajoute une transition à la séquence de clignotement du module, la transition s'effectuera dans l'espace de couleur HSL.
js | function addHslMoveToBlinkSeq( | HSLcolor, msDelay) |
nodejs | function addHslMoveToBlinkSeq( | HSLcolor, msDelay) |
cpp | int addHslMoveToBlinkSeq( | int HSLcolor, int msDelay) |
m | -(int) addHslMoveToBlinkSeq | : (int) HSLcolor |
| : (int) msDelay |
pas | function addHslMoveToBlinkSeq( | HSLcolor: LongInt, |
| msDelay: LongInt): LongInt |
vb | function addHslMoveToBlinkSeq( | ) As Integer |
cs | int addHslMoveToBlinkSeq( | int HSLcolor, int msDelay) |
java | int addHslMoveToBlinkSeq( | int HSLcolor, int msDelay) |
uwp | async Task<int> addHslMoveToBlinkSeq( | int HSLcolor, int msDelay) |
py | def addHslMoveToBlinkSeq( | HSLcolor, msDelay) |
php | function addHslMoveToBlinkSeq( | $HSLcolor, $msDelay) |
es | function addHslMoveToBlinkSeq( | HSLcolor, msDelay) |
cmd | YColorLed target addHslMoveToBlinkSeq | HSLcolor msDelay |
Paramètres :
| HSLcolor | couleur HSL désirée à la fin de la transition |
| msDelay | durée en millisecondes de la transition. |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur. En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
colorled→addRgbMoveToBlinkSeq()colorled.addRgbMoveToBlinkSeq()colorled.addRgbMoveToBlinkSeq()colorled→addRgbMoveToBlinkSeq()[colorled addRgbMoveToBlinkSeq: ]colorled.addRgbMoveToBlinkSeq()colorled.addRgbMoveToBlinkSeq()colorled.addRgbMoveToBlinkSeq()colorled.addRgbMoveToBlinkSeq()colorled.addRgbMoveToBlinkSeq()colorled.addRgbMoveToBlinkSeq()colorled→addRgbMoveToBlinkSeq()colorled.addRgbMoveToBlinkSeq()YColorLed addRgbMoveToBlinkSeq
Ajoute une transition à la séquence de clignotement du module, la transition s'effectuera dans l'espace de couleur RGB
js | function addRgbMoveToBlinkSeq( | RGBcolor, msDelay) |
nodejs | function addRgbMoveToBlinkSeq( | RGBcolor, msDelay) |
cpp | int addRgbMoveToBlinkSeq( | int RGBcolor, int msDelay) |
m | -(int) addRgbMoveToBlinkSeq | : (int) RGBcolor |
| : (int) msDelay |
pas | function addRgbMoveToBlinkSeq( | RGBcolor: LongInt, |
| msDelay: LongInt): LongInt |
vb | function addRgbMoveToBlinkSeq( | ) As Integer |
cs | int addRgbMoveToBlinkSeq( | int RGBcolor, int msDelay) |
java | int addRgbMoveToBlinkSeq( | int RGBcolor, int msDelay) |
uwp | async Task<int> addRgbMoveToBlinkSeq( | int RGBcolor, int msDelay) |
py | def addRgbMoveToBlinkSeq( | RGBcolor, msDelay) |
php | function addRgbMoveToBlinkSeq( | $RGBcolor, $msDelay) |
es | function addRgbMoveToBlinkSeq( | RGBcolor, msDelay) |
cmd | YColorLed target addRgbMoveToBlinkSeq | RGBcolor msDelay |
Paramètres :
| RGBcolor | couleur RGB désirée à la fin de la transition |
| msDelay | durée en millisecondes de la transition. |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur. En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
colorled→clearCache()colorled.clearCache()colorled.clearCache()colorled→clearCache()[colorled clearCache]colorled.clearCache()colorled.clearCache()colorled.clearCache()colorled.clearCache()colorled.clearCache()colorled→clearCache()colorled.clearCache()
Invalide le cache.
js | function clearCache( | ) |
nodejs | function clearCache( | ) |
cpp | void clearCache( | ) |
m | -(void) clearCache |
pas | procedure clearCache( | ) |
vb | procedure clearCache( | ) |
cs | void clearCache( | ) |
java | void clearCache( | ) |
py | def clearCache( | ) |
php | function clearCache( | ) |
es | function clearCache( | ) |
Invalide le cache des valeurs courantes de la LED RGB. Force le prochain appel à une méthode get_xxx() ou loadxxx() pour charger les les données depuis le module.
colorled→describe()colorled.describe()colorled.describe()colorled→describe()[colorled describe]colorled.describe()colorled.describe()colorled.describe()colorled.describe()colorled.describe()colorled→describe()colorled.describe()
Retourne un court texte décrivant de manière non-ambigüe l'instance de la LED RGB au format TYPE(NAME)=SERIAL.FUNCTIONID.
js | function describe( | ) |
nodejs | function describe( | ) |
cpp | string describe( | ) |
m | -(NSString*) describe |
pas | function describe( | ): string |
vb | function describe( | ) As String |
cs | string describe( | ) |
java | String describe( | ) |
py | def describe( | ) |
php | function describe( | ) |
es | function describe( | ) |
Plus précisément, TYPE correspond au type de fonction, NAME correspond au nom utilsé lors du premier accès a la fonction, SERIAL correspond au numéro de série du module si le module est connecté, ou "unresolved" sinon, et FUNCTIONID correspond à l'identifiant matériel de la fonction si le module est connecté. Par exemple, La methode va retourner Relay(MyCustomName.relay1)=RELAYLO1-123456.relay1 si le module est déjà connecté ou Relay(BadCustomeName.relay1)=unresolved si le module n'est pas déjà connecté. Cette methode ne declenche aucune transaction USB ou TCP et peut donc être utilisé dans un debuggeur.
Retourne :
une chaîne de caractères décrivant la LED RGB (ex: Relay(MyCustomName.relay1)=RELAYLO1-123456.relay1)
colorled→get_advertisedValue()
colorled→advertisedValue()colorled.get_advertisedValue()colorled.get_advertisedValue()colorled→get_advertisedValue()[colorled advertisedValue]colorled.get_advertisedValue()colorled.get_advertisedValue()colorled.get_advertisedValue()colorled.get_advertisedValue()colorled.get_advertisedValue()colorled.get_advertisedValue()colorled→get_advertisedValue()colorled.get_advertisedValue()YColorLed get_advertisedValue
Retourne la valeur courante de la LED RGB (pas plus de 6 caractères).
js | function get_advertisedValue( | ) |
nodejs | function get_advertisedValue( | ) |
cpp | string get_advertisedValue( | ) |
m | -(NSString*) advertisedValue |
pas | function get_advertisedValue( | ): string |
vb | function get_advertisedValue( | ) As String |
cs | string get_advertisedValue( | ) |
java | String get_advertisedValue( | ) |
uwp | async Task<string> get_advertisedValue( | ) |
py | def get_advertisedValue( | ) |
php | function get_advertisedValue( | ) |
es | function get_advertisedValue( | ) |
cmd | YColorLed target get_advertisedValue |
Retourne :
une chaîne de caractères représentant la valeur courante de la LED RGB (pas plus de 6 caractères).
En cas d'erreur, déclenche une exception ou retourne Y_ADVERTISEDVALUE_INVALID.
colorled→get_blinkSeqMaxSize()
colorled→blinkSeqMaxSize()colorled.get_blinkSeqMaxSize()colorled.get_blinkSeqMaxSize()colorled→get_blinkSeqMaxSize()[colorled blinkSeqMaxSize]colorled.get_blinkSeqMaxSize()colorled.get_blinkSeqMaxSize()colorled.get_blinkSeqMaxSize()colorled.get_blinkSeqMaxSize()colorled.get_blinkSeqMaxSize()colorled.get_blinkSeqMaxSize()colorled→get_blinkSeqMaxSize()colorled.get_blinkSeqMaxSize()YColorLed get_blinkSeqMaxSize
Retourne la longueur maximum de la sequence de clignotement.
js | function get_blinkSeqMaxSize( | ) |
nodejs | function get_blinkSeqMaxSize( | ) |
cpp | int get_blinkSeqMaxSize( | ) |
m | -(int) blinkSeqMaxSize |
pas | function get_blinkSeqMaxSize( | ): LongInt |
vb | function get_blinkSeqMaxSize( | ) As Integer |
cs | int get_blinkSeqMaxSize( | ) |
java | int get_blinkSeqMaxSize( | ) |
uwp | async Task<int> get_blinkSeqMaxSize( | ) |
py | def get_blinkSeqMaxSize( | ) |
php | function get_blinkSeqMaxSize( | ) |
es | function get_blinkSeqMaxSize( | ) |
cmd | YColorLed target get_blinkSeqMaxSize |
Retourne :
un entier représentant la longueur maximum de la sequence de clignotement
En cas d'erreur, déclenche une exception ou retourne Y_BLINKSEQMAXSIZE_INVALID.
colorled→get_blinkSeqSignature()
colorled→blinkSeqSignature()colorled.get_blinkSeqSignature()colorled.get_blinkSeqSignature()colorled→get_blinkSeqSignature()[colorled blinkSeqSignature]colorled.get_blinkSeqSignature()colorled.get_blinkSeqSignature()colorled.get_blinkSeqSignature()colorled.get_blinkSeqSignature()colorled.get_blinkSeqSignature()colorled.get_blinkSeqSignature()colorled→get_blinkSeqSignature()colorled.get_blinkSeqSignature()YColorLed get_blinkSeqSignature
Retourne la signature de la signature de la séquence de clignotement.
js | function get_blinkSeqSignature( | ) |
nodejs | function get_blinkSeqSignature( | ) |
cpp | int get_blinkSeqSignature( | ) |
m | -(int) blinkSeqSignature |
pas | function get_blinkSeqSignature( | ): LongInt |
vb | function get_blinkSeqSignature( | ) As Integer |
cs | int get_blinkSeqSignature( | ) |
java | int get_blinkSeqSignature( | ) |
uwp | async Task<int> get_blinkSeqSignature( | ) |
py | def get_blinkSeqSignature( | ) |
php | function get_blinkSeqSignature( | ) |
es | function get_blinkSeqSignature( | ) |
cmd | YColorLed target get_blinkSeqSignature |
Les séquences de clignotement ne pouvant pas être relues du module, ce mécanisme peut être utilisé pour détecter si une séquence spécifique est déja programmée.
Retourne :
un entier représentant la signature de la signature de la séquence de clignotement
En cas d'erreur, déclenche une exception ou retourne Y_BLINKSEQSIGNATURE_INVALID.
colorled→get_blinkSeqSize()
colorled→blinkSeqSize()colorled.get_blinkSeqSize()colorled.get_blinkSeqSize()colorled→get_blinkSeqSize()[colorled blinkSeqSize]colorled.get_blinkSeqSize()colorled.get_blinkSeqSize()colorled.get_blinkSeqSize()colorled.get_blinkSeqSize()colorled.get_blinkSeqSize()colorled.get_blinkSeqSize()colorled→get_blinkSeqSize()colorled.get_blinkSeqSize()YColorLed get_blinkSeqSize
Retourne la longueur actuelle de la sequence de clignotement.
js | function get_blinkSeqSize( | ) |
nodejs | function get_blinkSeqSize( | ) |
cpp | int get_blinkSeqSize( | ) |
m | -(int) blinkSeqSize |
pas | function get_blinkSeqSize( | ): LongInt |
vb | function get_blinkSeqSize( | ) As Integer |
cs | int get_blinkSeqSize( | ) |
java | int get_blinkSeqSize( | ) |
uwp | async Task<int> get_blinkSeqSize( | ) |
py | def get_blinkSeqSize( | ) |
php | function get_blinkSeqSize( | ) |
es | function get_blinkSeqSize( | ) |
cmd | YColorLed target get_blinkSeqSize |
Retourne :
un entier représentant la longueur actuelle de la sequence de clignotement
En cas d'erreur, déclenche une exception ou retourne Y_BLINKSEQSIZE_INVALID.
colorled→get_errorMessage()
colorled→errorMessage()colorled.get_errorMessage()colorled.get_errorMessage()colorled→get_errorMessage()[colorled errorMessage]colorled.get_errorMessage()colorled.get_errorMessage()colorled.get_errorMessage()colorled.get_errorMessage()colorled.get_errorMessage()colorled→get_errorMessage()colorled.get_errorMessage()
Retourne le message correspondant à la dernière erreur survenue lors de l'utilisation de la LED RGB.
js | function get_errorMessage( | ) |
nodejs | function get_errorMessage( | ) |
cpp | string get_errorMessage( | ) |
m | -(NSString*) errorMessage |
pas | function get_errorMessage( | ): string |
vb | function get_errorMessage( | ) As String |
cs | string get_errorMessage( | ) |
java | String get_errorMessage( | ) |
py | def get_errorMessage( | ) |
php | function get_errorMessage( | ) |
es | function get_errorMessage( | ) |
Cette méthode est principalement utile lorsque la librairie Yoctopuce est utilisée en désactivant la gestion des exceptions.
Retourne :
une chaîne de caractères correspondant au message de la dernière erreur qui s'est produit lors de l'utilisation de la LED RGB.
colorled→get_errorType()
colorled→errorType()colorled.get_errorType()colorled.get_errorType()colorled→get_errorType()colorled.get_errorType()colorled.get_errorType()colorled.get_errorType()colorled.get_errorType()colorled.get_errorType()colorled→get_errorType()colorled.get_errorType()
Retourne le code d'erreur correspondant à la dernière erreur survenue lors de l'utilisation de la LED RGB.
js | function get_errorType( | ) |
nodejs | function get_errorType( | ) |
cpp | YRETCODE get_errorType( | ) |
pas | function get_errorType( | ): YRETCODE |
vb | function get_errorType( | ) As YRETCODE |
cs | YRETCODE get_errorType( | ) |
java | int get_errorType( | ) |
py | def get_errorType( | ) |
php | function get_errorType( | ) |
es | function get_errorType( | ) |
Cette méthode est principalement utile lorsque la librairie Yoctopuce est utilisée en désactivant la gestion des exceptions.
Retourne :
un nombre correspondant au code de la dernière erreur qui s'est produit lors de l'utilisation de la LED RGB.
colorled→get_friendlyName()
colorled→friendlyName()colorled.get_friendlyName()colorled.get_friendlyName()colorled→get_friendlyName()[colorled friendlyName]colorled.get_friendlyName()colorled.get_friendlyName()colorled.get_friendlyName()colorled→get_friendlyName()colorled.get_friendlyName()
Retourne un identifiant global de la LED RGB au format NOM_MODULE.NOM_FONCTION.
js | function get_friendlyName( | ) |
nodejs | function get_friendlyName( | ) |
cpp | string get_friendlyName( | ) |
m | -(NSString*) friendlyName |
cs | string get_friendlyName( | ) |
java | String get_friendlyName( | ) |
py | def get_friendlyName( | ) |
php | function get_friendlyName( | ) |
es | function get_friendlyName( | ) |
Le chaîne retournée utilise soit les noms logiques du module et de la LED RGB si ils sont définis, soit respectivement le numéro de série du module et l'identifant matériel de la LED RGB (par exemple: MyCustomName.relay1)
Retourne :
une chaîne de caractères identifiant la LED RGB en utilisant les noms logiques (ex: MyCustomName.relay1)
En cas d'erreur, déclenche une exception ou retourne Y_FRIENDLYNAME_INVALID.
colorled→get_functionDescriptor()
colorled→functionDescriptor()colorled.get_functionDescriptor()colorled.get_functionDescriptor()colorled→get_functionDescriptor()[colorled functionDescriptor]colorled.get_functionDescriptor()colorled.get_functionDescriptor()colorled.get_functionDescriptor()colorled.get_functionDescriptor()colorled.get_functionDescriptor()colorled→get_functionDescriptor()colorled.get_functionDescriptor()
Retourne un identifiant unique de type YFUN_DESCR correspondant à la fonction.
js | function get_functionDescriptor( | ) |
nodejs | function get_functionDescriptor( | ) |
cpp | YFUN_DESCR get_functionDescriptor( | ) |
m | -(YFUN_DESCR) functionDescriptor |
pas | function get_functionDescriptor( | ): YFUN_DESCR |
vb | function get_functionDescriptor( | ) As YFUN_DESCR |
cs | YFUN_DESCR get_functionDescriptor( | ) |
java | String get_functionDescriptor( | ) |
py | def get_functionDescriptor( | ) |
php | function get_functionDescriptor( | ) |
es | function get_functionDescriptor( | ) |
Cet identifiant peut être utilisé pour tester si deux instance de YFunction référencent physiquement la même fonction sur le même module.
Retourne :
un identifiant de type YFUN_DESCR.
Si la fonction n'a jamais été contactée, la valeur retournée sera Y_FUNCTIONDESCRIPTOR_INVALID
colorled→get_functionId()
colorled→functionId()colorled.get_functionId()colorled.get_functionId()colorled→get_functionId()[colorled functionId]colorled.get_functionId()colorled.get_functionId()colorled.get_functionId()colorled.get_functionId()colorled→get_functionId()colorled.get_functionId()
Retourne l'identifiant matériel de la LED RGB, sans référence au module.
js | function get_functionId( | ) |
nodejs | function get_functionId( | ) |
cpp | string get_functionId( | ) |
m | -(NSString*) functionId |
vb | function get_functionId( | ) As String |
cs | string get_functionId( | ) |
java | String get_functionId( | ) |
py | def get_functionId( | ) |
php | function get_functionId( | ) |
es | function get_functionId( | ) |
Par example relay1.
Retourne :
une chaîne de caractères identifiant la LED RGB (ex: relay1)
En cas d'erreur, déclenche une exception ou retourne Y_FUNCTIONID_INVALID.
colorled→get_hardwareId()
colorled→hardwareId()colorled.get_hardwareId()colorled.get_hardwareId()colorled→get_hardwareId()[colorled hardwareId]colorled.get_hardwareId()colorled.get_hardwareId()colorled.get_hardwareId()colorled.get_hardwareId()colorled→get_hardwareId()colorled.get_hardwareId()
Retourne l'identifiant matériel unique de la LED RGB au format SERIAL.FUNCTIONID.
js | function get_hardwareId( | ) |
nodejs | function get_hardwareId( | ) |
cpp | string get_hardwareId( | ) |
m | -(NSString*) hardwareId |
vb | function get_hardwareId( | ) As String |
cs | string get_hardwareId( | ) |
java | String get_hardwareId( | ) |
py | def get_hardwareId( | ) |
php | function get_hardwareId( | ) |
es | function get_hardwareId( | ) |
L'identifiant unique est composé du numéro de série du module et de l'identifiant matériel de la LED RGB (par example RELAYLO1-123456.relay1).
Retourne :
une chaîne de caractères identifiant la LED RGB (ex: RELAYLO1-123456.relay1)
En cas d'erreur, déclenche une exception ou retourne Y_HARDWAREID_INVALID.
colorled→get_hslColor()
colorled→hslColor()colorled.get_hslColor()colorled.get_hslColor()colorled→get_hslColor()[colorled hslColor]colorled.get_hslColor()colorled.get_hslColor()colorled.get_hslColor()colorled.get_hslColor()colorled.get_hslColor()colorled.get_hslColor()colorled→get_hslColor()colorled.get_hslColor()YColorLed get_hslColor
Retourne la couleur HSL courante de la LED.
js | function get_hslColor( | ) |
nodejs | function get_hslColor( | ) |
cpp | int get_hslColor( | ) |
m | -(int) hslColor |
pas | function get_hslColor( | ): LongInt |
vb | function get_hslColor( | ) As Integer |
cs | int get_hslColor( | ) |
java | int get_hslColor( | ) |
uwp | async Task<int> get_hslColor( | ) |
py | def get_hslColor( | ) |
php | function get_hslColor( | ) |
es | function get_hslColor( | ) |
cmd | YColorLed target get_hslColor |
Retourne :
un entier représentant la couleur HSL courante de la LED
En cas d'erreur, déclenche une exception ou retourne Y_HSLCOLOR_INVALID.
colorled→get_logicalName()
colorled→logicalName()colorled.get_logicalName()colorled.get_logicalName()colorled→get_logicalName()[colorled logicalName]colorled.get_logicalName()colorled.get_logicalName()colorled.get_logicalName()colorled.get_logicalName()colorled.get_logicalName()colorled.get_logicalName()colorled→get_logicalName()colorled.get_logicalName()YColorLed get_logicalName
Retourne le nom logique de la LED RGB.
js | function get_logicalName( | ) |
nodejs | function get_logicalName( | ) |
cpp | string get_logicalName( | ) |
m | -(NSString*) logicalName |
pas | function get_logicalName( | ): string |
vb | function get_logicalName( | ) As String |
cs | string get_logicalName( | ) |
java | String get_logicalName( | ) |
uwp | async Task<string> get_logicalName( | ) |
py | def get_logicalName( | ) |
php | function get_logicalName( | ) |
es | function get_logicalName( | ) |
cmd | YColorLed target get_logicalName |
Retourne :
une chaîne de caractères représentant le nom logique de la LED RGB.
En cas d'erreur, déclenche une exception ou retourne Y_LOGICALNAME_INVALID.
colorled→get_module()
colorled→module()colorled.get_module()colorled.get_module()colorled→get_module()[colorled module]colorled.get_module()colorled.get_module()colorled.get_module()colorled.get_module()colorled.get_module()colorled→get_module()colorled.get_module()
Retourne l'objet YModule correspondant au module Yoctopuce qui héberge la fonction.
js | function get_module( | ) |
nodejs | function get_module( | ) |
cpp | YModule * get_module( | ) |
m | -(YModule*) module |
pas | function get_module( | ): TYModule |
vb | function get_module( | ) As YModule |
cs | YModule get_module( | ) |
java | YModule get_module( | ) |
py | def get_module( | ) |
php | function get_module( | ) |
es | function get_module( | ) |
Si la fonction ne peut être trouvée sur aucun module, l'instance de YModule retournée ne sera pas joignable.
Retourne :
une instance de YModule
colorled→get_module_async()
colorled→module_async()colorled.get_module_async()colorled.get_module_async()
Retourne l'objet YModule correspondant au module Yoctopuce qui héberge la fonction.
js | function get_module_async( | callback, context) |
nodejs | function get_module_async( | callback, context) |
Si la fonction ne peut être trouvée sur aucun module, l'instance de YModule retournée ne sera pas joignable.
Cette version asynchrone n'existe qu'en Javascript. Elle utilise une fonction de callback plutôt qu'une simple valeur de retour, pour éviter de bloquer la VM Javascript de Firefox, qui n'implémente pas le passage de contrôle entre threads durant les appels d'entrée/sortie bloquants.
Paramètres :
| callback | fonction de callback qui sera appelée dès que le résultat sera connu. La fonction callback reçoit trois arguments: le contexte fourni par l'appelant, l'objet fonction concerné et l'instance demandée de YModule |
| context | contexte fourni par l'appelant, et qui sera passé tel-quel à la fonction de callback |
Retourne :
rien du tout : le résultat sera passé en paramètre à la fonction de callback.
colorled→get_rgbColor()
colorled→rgbColor()colorled.get_rgbColor()colorled.get_rgbColor()colorled→get_rgbColor()[colorled rgbColor]colorled.get_rgbColor()colorled.get_rgbColor()colorled.get_rgbColor()colorled.get_rgbColor()colorled.get_rgbColor()colorled.get_rgbColor()colorled→get_rgbColor()colorled.get_rgbColor()YColorLed get_rgbColor
Retourne la couleur RGB courante de la LED.
js | function get_rgbColor( | ) |
nodejs | function get_rgbColor( | ) |
cpp | int get_rgbColor( | ) |
m | -(int) rgbColor |
pas | function get_rgbColor( | ): LongInt |
vb | function get_rgbColor( | ) As Integer |
cs | int get_rgbColor( | ) |
java | int get_rgbColor( | ) |
uwp | async Task<int> get_rgbColor( | ) |
py | def get_rgbColor( | ) |
php | function get_rgbColor( | ) |
es | function get_rgbColor( | ) |
cmd | YColorLed target get_rgbColor |
Retourne :
un entier représentant la couleur RGB courante de la LED
En cas d'erreur, déclenche une exception ou retourne Y_RGBCOLOR_INVALID.
colorled→get_rgbColorAtPowerOn()
colorled→rgbColorAtPowerOn()colorled.get_rgbColorAtPowerOn()colorled.get_rgbColorAtPowerOn()colorled→get_rgbColorAtPowerOn()[colorled rgbColorAtPowerOn]colorled.get_rgbColorAtPowerOn()colorled.get_rgbColorAtPowerOn()colorled.get_rgbColorAtPowerOn()colorled.get_rgbColorAtPowerOn()colorled.get_rgbColorAtPowerOn()colorled.get_rgbColorAtPowerOn()colorled→get_rgbColorAtPowerOn()colorled.get_rgbColorAtPowerOn()YColorLed get_rgbColorAtPowerOn
Retourne la couleur configurée pour être affichage à l'allumage du module.
js | function get_rgbColorAtPowerOn( | ) |
nodejs | function get_rgbColorAtPowerOn( | ) |
cpp | int get_rgbColorAtPowerOn( | ) |
m | -(int) rgbColorAtPowerOn |
pas | function get_rgbColorAtPowerOn( | ): LongInt |
vb | function get_rgbColorAtPowerOn( | ) As Integer |
cs | int get_rgbColorAtPowerOn( | ) |
java | int get_rgbColorAtPowerOn( | ) |
uwp | async Task<int> get_rgbColorAtPowerOn( | ) |
py | def get_rgbColorAtPowerOn( | ) |
php | function get_rgbColorAtPowerOn( | ) |
es | function get_rgbColorAtPowerOn( | ) |
cmd | YColorLed target get_rgbColorAtPowerOn |
Retourne :
un entier représentant la couleur configurée pour être affichage à l'allumage du module
En cas d'erreur, déclenche une exception ou retourne Y_RGBCOLORATPOWERON_INVALID.
colorled→get_userData()
colorled→userData()colorled.get_userData()colorled.get_userData()colorled→get_userData()[colorled userData]colorled.get_userData()colorled.get_userData()colorled.get_userData()colorled.get_userData()colorled.get_userData()colorled→get_userData()colorled.get_userData()
Retourne le contenu de l'attribut userData, précédemment stocké à l'aide de la méthode set_userData.
js | function get_userData( | ) |
nodejs | function get_userData( | ) |
cpp | void * get_userData( | ) |
m | -(id) userData |
pas | function get_userData( | ): Tobject |
vb | function get_userData( | ) As Object |
cs | object get_userData( | ) |
java | Object get_userData( | ) |
py | def get_userData( | ) |
php | function get_userData( | ) |
es | function get_userData( | ) |
Cet attribut n'es pas utilisé directement par l'API. Il est à la disposition de l'appelant pour stocker un contexte.
Retourne :
l'objet stocké précédemment par l'appelant.
colorled→hslMove()colorled.hslMove()colorled.hslMove()colorled→hslMove()[colorled hslMove: ]colorled.hslMove()colorled.hslMove()colorled.hslMove()colorled.hslMove()colorled.hslMove()colorled→hslMove()colorled.hslMove()YColorLed hslMove
Effectue une transition continue dans l'espace HSL entre la couleur courante et une nouvelle couleur.
js | function hslMove( | hsl_target, ms_duration) |
nodejs | function hslMove( | hsl_target, ms_duration) |
cpp | int hslMove( | int hsl_target, int ms_duration) |
m | -(int) hslMove | : (int) hsl_target : (int) ms_duration |
pas | function hslMove( | hsl_target: LongInt, ms_duration: LongInt): integer |
vb | function hslMove( | ByVal hsl_target As Integer, |
| ByVal ms_duration As Integer) As Integer |
cs | int hslMove( | int hsl_target, int ms_duration) |
java | int hslMove( | int hsl_target, int ms_duration) |
py | def hslMove( | hsl_target, ms_duration) |
php | function hslMove( | $hsl_target, $ms_duration) |
es | function hslMove( | hsl_target, ms_duration) |
cmd | YColorLed target hslMove | hsl_target ms_duration |
Paramètres :
| hsl_target | couleur HSL désirée à la fin de la transition |
| ms_duration | durée de la transition, en millisecondes |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
colorled→isOnline()colorled.isOnline()colorled.isOnline()colorled→isOnline()[colorled isOnline]colorled.isOnline()colorled.isOnline()colorled.isOnline()colorled.isOnline()colorled.isOnline()colorled→isOnline()colorled.isOnline()
Vérifie si le module hébergeant la LED RGB est joignable, sans déclencher d'erreur.
js | function isOnline( | ) |
nodejs | function isOnline( | ) |
cpp | bool isOnline( | ) |
m | -(BOOL) isOnline |
pas | function isOnline( | ): boolean |
vb | function isOnline( | ) As Boolean |
cs | bool isOnline( | ) |
java | boolean isOnline( | ) |
py | def isOnline( | ) |
php | function isOnline( | ) |
es | function isOnline( | ) |
Si les valeurs des attributs en cache de la LED RGB sont valides au moment de l'appel, le module est considéré joignable. Cette fonction ne cause en aucun cas d'exception, quelle que soit l'erreur qui pourrait se produire lors de la vérification de joignabilité.
Retourne :
true si la LED RGB est joignable, false sinon
colorled→isOnline_async()colorled.isOnline_async()colorled.isOnline_async()
Vérifie si le module hébergeant la LED RGB est joignable, sans déclencher d'erreur.
js | function isOnline_async( | callback, context) |
nodejs | function isOnline_async( | callback, context) |
Si les valeurs des attributs en cache de la LED RGB sont valides au moment de l'appel, le module est considéré joignable. Cette fonction ne cause en aucun cas d'exception, quelle que soit l'erreur qui pourrait se produire lors de la vérification de joignabilité.
Cette version asynchrone n'existe qu'en Javascript. Elle utilise une fonction de callback plutôt qu'une simple valeur de retour, pour éviter de bloquer la machine virtuelle Javascript avec une attente active.
Paramètres :
| callback | fonction de callback qui sera appelée dès que le résultat sera connu. La fonction callback reçoit trois arguments: le contexte fourni par l'appelant, l'objet fonction concerné et le résultat booléen |
| context | contexte fourni par l'appelant, et qui sera passé tel-quel à la fonction de callback |
Retourne :
rien du tout : le résultat sera passé en paramètre à la fonction de callback.
colorled→load()colorled.load()colorled.load()colorled→load()[colorled load: ]colorled.load()colorled.load()colorled.load()colorled.load()colorled.load()colorled→load()colorled.load()
Met en cache les valeurs courantes de la LED RGB, avec une durée de validité spécifiée.
js | function load( | msValidity) |
nodejs | function load( | msValidity) |
cpp | YRETCODE load( | int msValidity) |
m | -(YRETCODE) load | : (int) msValidity |
pas | function load( | msValidity: integer): YRETCODE |
vb | function load( | ByVal msValidity As Integer) As YRETCODE |
cs | YRETCODE load( | ulong msValidity) |
java | int load( | long msValidity) |
py | def load( | msValidity) |
php | function load( | $msValidity) |
es | function load( | msValidity) |
Par défaut, lorsqu'on accède à un module, tous les attributs des fonctions du module sont automatiquement mises en cache pour la durée standard (5 ms). Cette méthode peut être utilisée pour marquer occasionellement les données cachées comme valides pour une plus longue période, par exemple dans le but de réduire le trafic réseau.
Paramètres :
| msValidity | un entier correspondant à la durée de validité attribuée aux les paramètres chargés, en millisecondes |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
colorled→loadAttribute()colorled.loadAttribute()colorled.loadAttribute()colorled→loadAttribute()[colorled loadAttribute: ]colorled.loadAttribute()colorled.loadAttribute()colorled.loadAttribute()colorled.loadAttribute()colorled.loadAttribute()colorled.loadAttribute()colorled→loadAttribute()colorled.loadAttribute()
Retourne la valeur actuelle d'un attribut spécifique de la fonction, sous forme de texte, le plus rapidement possible mais sans passer par le cache.
js | function loadAttribute( | attrName) |
nodejs | function loadAttribute( | attrName) |
cpp | string loadAttribute( | string attrName) |
m | -(NSString*) loadAttribute | : (NSString*) attrName |
pas | function loadAttribute( | attrName: string): string |
vb | function loadAttribute( | ) As String |
cs | string loadAttribute( | string attrName) |
java | String loadAttribute( | String attrName) |
uwp | async Task<string> loadAttribute( | string attrName) |
py | def loadAttribute( | attrName) |
php | function loadAttribute( | $attrName) |
es | function loadAttribute( | attrName) |
Paramètres :
| attrName | le nom de l'attribut désiré |
Retourne :
une chaîne de caractères représentant la valeur actuelle de l'attribut.
En cas d'erreur, déclenche une exception ou retourne un chaîne vide.
colorled→load_async()colorled.load_async()colorled.load_async()
Met en cache les valeurs courantes de la LED RGB, avec une durée de validité spécifiée.
js | function load_async( | msValidity, callback, context) |
nodejs | function load_async( | msValidity, callback, context) |
Par défaut, lorsqu'on accède à un module, tous les attributs des fonctions du module sont automatiquement mises en cache pour la durée standard (5 ms). Cette méthode peut être utilisée pour marquer occasionellement les données cachées comme valides pour une plus longue période, par exemple dans le but de réduire le trafic réseau.
Cette version asynchrone n'existe qu'en Javascript. Elle utilise une fonction de callback plutôt qu'une simple valeur de retour, pour éviter de bloquer la machine virtuelle Javascript avec une attente active.
Paramètres :
| msValidity | un entier correspondant à la durée de validité attribuée aux les paramètres chargés, en millisecondes |
| callback | fonction de callback qui sera appelée dès que le résultat sera connu. La fonction callback reçoit trois arguments: le contexte fourni par l'appelant, l'objet fonction concerné et le code d'erreur (ou YAPI_SUCCESS) |
| context | contexte fourni par l'appelant, et qui sera passé tel-quel à la fonction de callback |
Retourne :
rien du tout : le résultat sera passé en paramètre à la fonction de callback.
colorled→muteValueCallbacks()colorled.muteValueCallbacks()colorled.muteValueCallbacks()colorled→muteValueCallbacks()[colorled muteValueCallbacks]colorled.muteValueCallbacks()colorled.muteValueCallbacks()colorled.muteValueCallbacks()colorled.muteValueCallbacks()colorled.muteValueCallbacks()colorled.muteValueCallbacks()colorled→muteValueCallbacks()colorled.muteValueCallbacks()YColorLed muteValueCallbacks
Désactive l'envoi de chaque changement de la valeur publiée au hub parent.
js | function muteValueCallbacks( | ) |
nodejs | function muteValueCallbacks( | ) |
cpp | int muteValueCallbacks( | ) |
m | -(int) muteValueCallbacks |
pas | function muteValueCallbacks( | ): LongInt |
vb | function muteValueCallbacks( | ) As Integer |
cs | int muteValueCallbacks( | ) |
java | int muteValueCallbacks( | ) |
uwp | async Task<int> muteValueCallbacks( | ) |
py | def muteValueCallbacks( | ) |
php | function muteValueCallbacks( | ) |
es | function muteValueCallbacks( | ) |
cmd | YColorLed target muteValueCallbacks |
Vous pouvez utiliser cette fonction pour économiser la bande passante et le CPU sur les machines de faible puissance, ou pour éviter le déclanchement de callbacks HTTP. N'oubliez pas d'appeler la méthode saveToFlash() du module si le réglage doit être préservé.
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
colorled→nextColorLed()colorled.nextColorLed()colorled.nextColorLed()colorled→nextColorLed()[colorled nextColorLed]colorled.nextColorLed()colorled.nextColorLed()colorled.nextColorLed()colorled.nextColorLed()colorled.nextColorLed()colorled.nextColorLed()colorled→nextColorLed()colorled.nextColorLed()
Continue l'énumération des LEDs RGB commencée à l'aide de yFirstColorLed().
js | function nextColorLed( | ) |
nodejs | function nextColorLed( | ) |
cpp | YColorLed * nextColorLed( | ) |
m | -(YColorLed*) nextColorLed |
pas | function nextColorLed( | ): TYColorLed |
vb | function nextColorLed( | ) As YColorLed |
cs | YColorLed nextColorLed( | ) |
java | YColorLed nextColorLed( | ) |
uwp | YColorLed nextColorLed( | ) |
py | def nextColorLed( | ) |
php | function nextColorLed( | ) |
es | function nextColorLed( | ) |
Retourne :
un pointeur sur un objet YColorLed accessible en ligne, ou null lorsque l'énumération est terminée.
colorled→registerValueCallback()colorled.registerValueCallback()colorled.registerValueCallback()colorled→registerValueCallback()[colorled registerValueCallback: ]colorled.registerValueCallback()colorled.registerValueCallback()colorled.registerValueCallback()colorled.registerValueCallback()colorled.registerValueCallback()colorled.registerValueCallback()colorled→registerValueCallback()colorled.registerValueCallback()
Enregistre la fonction de callback qui est appelée à chaque changement de la valeur publiée.
js | function registerValueCallback( | callback) |
nodejs | function registerValueCallback( | callback) |
cpp | int registerValueCallback( | YColorLedValueCallback callback) |
m | -(int) registerValueCallback | : (YColorLedValueCallback) callback |
pas | function registerValueCallback( | callback: TYColorLedValueCallback): LongInt |
vb | function registerValueCallback( | ) As Integer |
cs | int registerValueCallback( | ValueCallback callback) |
java | int registerValueCallback( | UpdateCallback callback) |
uwp | async Task<int> registerValueCallback( | ValueCallback callback) |
py | def registerValueCallback( | callback) |
php | function registerValueCallback( | $callback) |
es | function registerValueCallback( | callback) |
Ce callback n'est appelé que durant l'exécution de ySleep ou yHandleEvents. Cela permet à l'appelant de contrôler quand les callback peuvent se produire. Il est important d'appeler l'une de ces deux fonctions périodiquement pour garantir que les callback ne soient pas appelés trop tard. Pour désactiver un callback, il suffit d'appeler cette méthode en lui passant un pointeur nul.
Paramètres :
| callback | la fonction de callback à rappeler, ou un pointeur nul. La fonction de callback doit accepter deux arguments: l'object fonction dont la valeur a changé, et la chaîne de caractère décrivant la nouvelle valeur publiée. |
colorled→resetBlinkSeq()colorled.resetBlinkSeq()colorled.resetBlinkSeq()colorled→resetBlinkSeq()[colorled resetBlinkSeq]colorled.resetBlinkSeq()colorled.resetBlinkSeq()colorled.resetBlinkSeq()colorled.resetBlinkSeq()colorled.resetBlinkSeq()colorled.resetBlinkSeq()colorled→resetBlinkSeq()colorled.resetBlinkSeq()YColorLed resetBlinkSeq
efface le contenu de la sequence de clignotement.
js | function resetBlinkSeq( | ) |
nodejs | function resetBlinkSeq( | ) |
cpp | int resetBlinkSeq( | ) |
m | -(int) resetBlinkSeq |
pas | function resetBlinkSeq( | ): LongInt |
vb | function resetBlinkSeq( | ) As Integer |
cs | int resetBlinkSeq( | ) |
java | int resetBlinkSeq( | ) |
uwp | async Task<int> resetBlinkSeq( | ) |
py | def resetBlinkSeq( | ) |
php | function resetBlinkSeq( | ) |
es | function resetBlinkSeq( | ) |
cmd | YColorLed target resetBlinkSeq |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur. En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
colorled→rgbMove()colorled.rgbMove()colorled.rgbMove()colorled→rgbMove()[colorled rgbMove: ]colorled.rgbMove()colorled.rgbMove()colorled.rgbMove()colorled.rgbMove()colorled.rgbMove()colorled→rgbMove()colorled.rgbMove()YColorLed rgbMove
Effectue une transition continue dans l'espace RGB entre la couleur courante et une nouvelle couleur.
js | function rgbMove( | rgb_target, ms_duration) |
nodejs | function rgbMove( | rgb_target, ms_duration) |
cpp | int rgbMove( | int rgb_target, int ms_duration) |
m | -(int) rgbMove | : (int) rgb_target : (int) ms_duration |
pas | function rgbMove( | rgb_target: LongInt, ms_duration: LongInt): integer |
vb | function rgbMove( | ByVal rgb_target As Integer, |
| ByVal ms_duration As Integer) As Integer |
cs | int rgbMove( | int rgb_target, int ms_duration) |
java | int rgbMove( | int rgb_target, int ms_duration) |
py | def rgbMove( | rgb_target, ms_duration) |
php | function rgbMove( | $rgb_target, $ms_duration) |
es | function rgbMove( | rgb_target, ms_duration) |
cmd | YColorLed target rgbMove | rgb_target ms_duration |
Paramètres :
| rgb_target | couleur RGB désirée à la fin de la transition |
| ms_duration | durée de la transition, en millisecondes |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
colorled→set_hslColor()
colorled→setHslColor()colorled.set_hslColor()colorled.set_hslColor()colorled→set_hslColor()[colorled setHslColor: ]colorled.set_hslColor()colorled.set_hslColor()colorled.set_hslColor()colorled.set_hslColor()colorled.set_hslColor()colorled.set_hslColor()colorled→set_hslColor()colorled.set_hslColor()YColorLed set_hslColor
Modifie la couleur courante de la LED, en utilisant une couleur HSL spécifiée.
js | function set_hslColor( | newval) |
nodejs | function set_hslColor( | newval) |
cpp | int set_hslColor( | int newval) |
m | -(int) setHslColor | : (int) newval |
pas | function set_hslColor( | newval: LongInt): integer |
vb | function set_hslColor( | ByVal newval As Integer) As Integer |
cs | int set_hslColor( | int newval) |
java | int set_hslColor( | int newval) |
uwp | async Task<int> set_hslColor( | int newval) |
py | def set_hslColor( | newval) |
php | function set_hslColor( | $newval) |
es | function set_hslColor( | newval) |
cmd | YColorLed target set_hslColor | newval |
L'encodage est réalisé de la manière suivante: 0xHHSSLL.
Paramètres :
| newval | un entier représentant la couleur courante de la LED, en utilisant une couleur HSL spécifiée |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
colorled→set_logicalName()
colorled→setLogicalName()colorled.set_logicalName()colorled.set_logicalName()colorled→set_logicalName()[colorled setLogicalName: ]colorled.set_logicalName()colorled.set_logicalName()colorled.set_logicalName()colorled.set_logicalName()colorled.set_logicalName()colorled.set_logicalName()colorled→set_logicalName()colorled.set_logicalName()YColorLed set_logicalName
Modifie le nom logique de la LED RGB.
js | function set_logicalName( | newval) |
nodejs | function set_logicalName( | newval) |
cpp | int set_logicalName( | const string& newval) |
m | -(int) setLogicalName | : (NSString*) newval |
pas | function set_logicalName( | newval: string): integer |
vb | function set_logicalName( | ByVal newval As String) As Integer |
cs | int set_logicalName( | string newval) |
java | int set_logicalName( | String newval) |
uwp | async Task<int> set_logicalName( | string newval) |
py | def set_logicalName( | newval) |
php | function set_logicalName( | $newval) |
es | function set_logicalName( | newval) |
cmd | YColorLed target set_logicalName | newval |
Vous pouvez utiliser yCheckLogicalName() pour vérifier si votre paramètre est valide. N'oubliez pas d'appeler la méthode saveToFlash() du module si le réglage doit être préservé.
Paramètres :
| newval | une chaîne de caractères représentant le nom logique de la LED RGB. |
Retourne :
YAPI_SUCCESS si l'appel se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
colorled→set_rgbColor()
colorled→setRgbColor()colorled.set_rgbColor()colorled.set_rgbColor()colorled→set_rgbColor()[colorled setRgbColor: ]colorled.set_rgbColor()colorled.set_rgbColor()colorled.set_rgbColor()colorled.set_rgbColor()colorled.set_rgbColor()colorled.set_rgbColor()colorled→set_rgbColor()colorled.set_rgbColor()YColorLed set_rgbColor
Modifie la couleur courante de la LED, en utilisant une couleur RGB (Rouge Vert Bleu).
js | function set_rgbColor( | newval) |
nodejs | function set_rgbColor( | newval) |
cpp | int set_rgbColor( | int newval) |
m | -(int) setRgbColor | : (int) newval |
pas | function set_rgbColor( | newval: LongInt): integer |
vb | function set_rgbColor( | ByVal newval As Integer) As Integer |
cs | int set_rgbColor( | int newval) |
java | int set_rgbColor( | int newval) |
uwp | async Task<int> set_rgbColor( | int newval) |
py | def set_rgbColor( | newval) |
php | function set_rgbColor( | $newval) |
es | function set_rgbColor( | newval) |
cmd | YColorLed target set_rgbColor | newval |
L'encodage est réalisé de la manière suivante: 0xRRGGBB.
Paramètres :
| newval | un entier représentant la couleur courante de la LED, en utilisant une couleur RGB (Rouge Vert Bleu) |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
colorled→set_rgbColorAtPowerOn()
colorled→setRgbColorAtPowerOn()colorled.set_rgbColorAtPowerOn()colorled.set_rgbColorAtPowerOn()colorled→set_rgbColorAtPowerOn()[colorled setRgbColorAtPowerOn: ]colorled.set_rgbColorAtPowerOn()colorled.set_rgbColorAtPowerOn()colorled.set_rgbColorAtPowerOn()colorled.set_rgbColorAtPowerOn()colorled.set_rgbColorAtPowerOn()colorled.set_rgbColorAtPowerOn()colorled→set_rgbColorAtPowerOn()colorled.set_rgbColorAtPowerOn()YColorLed set_rgbColorAtPowerOn
Modifie la couleur que la LED va afficher à l'allumage du module.
js | function set_rgbColorAtPowerOn( | newval) |
nodejs | function set_rgbColorAtPowerOn( | newval) |
cpp | int set_rgbColorAtPowerOn( | int newval) |
m | -(int) setRgbColorAtPowerOn | : (int) newval |
pas | function set_rgbColorAtPowerOn( | newval: LongInt): integer |
vb | function set_rgbColorAtPowerOn( | ByVal newval As Integer) As Integer |
cs | int set_rgbColorAtPowerOn( | int newval) |
java | int set_rgbColorAtPowerOn( | int newval) |
uwp | async Task<int> set_rgbColorAtPowerOn( | int newval) |
py | def set_rgbColorAtPowerOn( | newval) |
php | function set_rgbColorAtPowerOn( | $newval) |
es | function set_rgbColorAtPowerOn( | newval) |
cmd | YColorLed target set_rgbColorAtPowerOn | newval |
Paramètres :
| newval | un entier représentant la couleur que la LED va afficher à l'allumage du module |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
colorled→set_userData()
colorled→setUserData()colorled.set_userData()colorled.set_userData()colorled→set_userData()[colorled setUserData: ]colorled.set_userData()colorled.set_userData()colorled.set_userData()colorled.set_userData()colorled.set_userData()colorled→set_userData()colorled.set_userData()
Enregistre un contexte libre dans l'attribut userData de la fonction, afin de le retrouver plus tard à l'aide de la méthode get_userData.
js | function set_userData( | data) |
nodejs | function set_userData( | data) |
cpp | void set_userData( | void* data) |
m | -(void) setUserData | : (id) data |
pas | procedure set_userData( | data: Tobject) |
vb | procedure set_userData( | ByVal data As Object) |
cs | void set_userData( | object data) |
java | void set_userData( | Object data) |
py | def set_userData( | data) |
php | function set_userData( | $data) |
es | function set_userData( | data) |
Cet attribut n'es pas utilisé directement par l'API. Il est à la disposition de l'appelant pour stocker un contexte.
Paramètres :
| data | objet quelconque à mémoriser |
colorled→startBlinkSeq()colorled.startBlinkSeq()colorled.startBlinkSeq()colorled→startBlinkSeq()[colorled startBlinkSeq]colorled.startBlinkSeq()colorled.startBlinkSeq()colorled.startBlinkSeq()colorled.startBlinkSeq()colorled.startBlinkSeq()colorled.startBlinkSeq()colorled→startBlinkSeq()colorled.startBlinkSeq()YColorLed startBlinkSeq
Démarre l'exécution de la séquence préprogrammée de clignotement.
js | function startBlinkSeq( | ) |
nodejs | function startBlinkSeq( | ) |
cpp | int startBlinkSeq( | ) |
m | -(int) startBlinkSeq |
pas | function startBlinkSeq( | ): LongInt |
vb | function startBlinkSeq( | ) As Integer |
cs | int startBlinkSeq( | ) |
java | int startBlinkSeq( | ) |
uwp | async Task<int> startBlinkSeq( | ) |
py | def startBlinkSeq( | ) |
php | function startBlinkSeq( | ) |
es | function startBlinkSeq( | ) |
cmd | YColorLed target startBlinkSeq |
La séquence va tourner en boucle jusqu'à ce qu'elle soit stoppée par stopBlinkSeq ou un changement explicite.
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur. En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
colorled→stopBlinkSeq()colorled.stopBlinkSeq()colorled.stopBlinkSeq()colorled→stopBlinkSeq()[colorled stopBlinkSeq]colorled.stopBlinkSeq()colorled.stopBlinkSeq()colorled.stopBlinkSeq()colorled.stopBlinkSeq()colorled.stopBlinkSeq()colorled.stopBlinkSeq()colorled→stopBlinkSeq()colorled.stopBlinkSeq()YColorLed stopBlinkSeq
Arrête l'exécution de la séquence préprogrammée de clignotement.
js | function stopBlinkSeq( | ) |
nodejs | function stopBlinkSeq( | ) |
cpp | int stopBlinkSeq( | ) |
m | -(int) stopBlinkSeq |
pas | function stopBlinkSeq( | ): LongInt |
vb | function stopBlinkSeq( | ) As Integer |
cs | int stopBlinkSeq( | ) |
java | int stopBlinkSeq( | ) |
uwp | async Task<int> stopBlinkSeq( | ) |
py | def stopBlinkSeq( | ) |
php | function stopBlinkSeq( | ) |
es | function stopBlinkSeq( | ) |
cmd | YColorLed target stopBlinkSeq |
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur. En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
colorled→unmuteValueCallbacks()colorled.unmuteValueCallbacks()colorled.unmuteValueCallbacks()colorled→unmuteValueCallbacks()[colorled unmuteValueCallbacks]colorled.unmuteValueCallbacks()colorled.unmuteValueCallbacks()colorled.unmuteValueCallbacks()colorled.unmuteValueCallbacks()colorled.unmuteValueCallbacks()colorled.unmuteValueCallbacks()colorled→unmuteValueCallbacks()colorled.unmuteValueCallbacks()YColorLed unmuteValueCallbacks
Réactive l'envoi de chaque changement de la valeur publiée au hub parent.
js | function unmuteValueCallbacks( | ) |
nodejs | function unmuteValueCallbacks( | ) |
cpp | int unmuteValueCallbacks( | ) |
m | -(int) unmuteValueCallbacks |
pas | function unmuteValueCallbacks( | ): LongInt |
vb | function unmuteValueCallbacks( | ) As Integer |
cs | int unmuteValueCallbacks( | ) |
java | int unmuteValueCallbacks( | ) |
uwp | async Task<int> unmuteValueCallbacks( | ) |
py | def unmuteValueCallbacks( | ) |
php | function unmuteValueCallbacks( | ) |
es | function unmuteValueCallbacks( | ) |
cmd | YColorLed target unmuteValueCallbacks |
Cette fonction annule un précédent appel à muteValueCallbacks(). N'oubliez pas d'appeler la méthode saveToFlash() du module si le réglage doit être préservé.
Retourne :
YAPI_SUCCESS si l'opération se déroule sans erreur.
En cas d'erreur, déclenche une exception ou retourne un code d'erreur négatif.
colorled→wait_async()colorled.wait_async()colorled.wait_async()colorled.wait_async()
Attend que toutes les commandes asynchrones en cours d'exécution sur le module soient terminées, et appelle le callback passé en paramètre.
js | function wait_async( | callback, context) |
nodejs | function wait_async( | callback, context) |
es | function wait_async( | callback, context) |
La fonction callback peut donc librement utiliser des fonctions synchrones ou asynchrones, sans risquer de bloquer la machine virtuelle Javascript.
Paramètres :
| callback | fonction de callback qui sera appelée dès que toutes les commandes en cours d'exécution sur le module seront terminées La fonction callback reçoit deux arguments: le contexte fourni par l'appelant et l'objet fonction concerné. |
| context | contexte fourni par l'appelant, et qui sera passé tel-quel à la fonction de callback |
Retourne :
rien du tout.
21. Problèmes courants
21.1. Linux et USB
Pour fonctionner correctement sous Linux la librairie a besoin d'avoir accès en écriture à tous les périphériques USB Yoctopuce. Or, par défaut, sous Linux les droits d'accès des utilisateurs non-root à USB sont limités à la lecture. Afin d'éviter de devoir lancer les exécutables en tant que root, il faut créer une nouvelle règle udev pour autoriser un ou plusieurs utilisateurs à accéder en écriture aux périphériques Yoctopuce.
Pour ajouter une règle udev à votre installation, il faut ajouter un fichier avec un nom au format "##-nomArbitraire.rules" dans le répertoire "/etc/udev/rules.d". Lors du démarrage du système, udev va lire tous les fichiers avec l'extension ".rules" de ce répertoire en respectant l'ordre alphabétique (par exemple, le fichier "51-custom.rules" sera interprété APRES le fichier "50-udev-default.rules").
Le fichier "50-udev-default" contient les règles udev par défaut du système. Pour modifier le comportement par défaut du système, il faut donc créer un fichier qui commence par un nombre plus grand que 50, qui définira un comportement plus spécifique que le défaut du système. Notez que pour ajouter une règle vous aurez besoin d'avoir un accès root sur le système.
Dans le répertoire udev_conf de l'archive du VirtualHub47 pour Linux, vous trouverez deux exemples de règles qui vous éviterons de devoir partir de rien.
Exemple 1: 51-yoctopuce.rules
Cette règle va autoriser tous les utilisateurs à accéder en lecture et en écriture aux périphériques Yoctopuce USB. Les droits d'accès pour tous les autres périphériques ne seront pas modifiés. Si ce scénario vous convient il suffit de copier le fichier "51-yoctopuce_all.rules" dans le répertoire "/etc/udev/rules.d" et de redémarrer votre système.
# udev rules to allow write access to all users # for Yoctopuce USB devices SUBSYSTEM=="usb", ATTR{idVendor}=="24e0", MODE="0666"
Exemple 2: 51-yoctopuce_group.rules
Cette règle va autoriser le groupe "yoctogroup" à accéder en lecture et écriture aux périphériques Yoctopuce USB. Les droits d'accès pour tous les autres périphériques ne seront pas modifiés. Si ce scénario vous convient il suffit de copier le fichier "51-yoctopuce_group.rules" dans le répertoire "/etc/udev/rules.d" et de redémarrer votre système.
# udev rules to allow write access to all users of "yoctogroup" # for Yoctopuce USB devices SUBSYSTEM=="usb", ATTR{idVendor}=="24e0", MODE="0664", GROUP="yoctogroup"
21.2. Plateformes ARM: HF et EL
Sur ARM il existe deux grandes familles d'executables: HF (Hard Float) et EL (EABI Little Endian). Ces deux familles ne sont absolument pas compatibles entre elles. La capacité d'une machine ARM à faire tourner des exécutables de l'une ou l'autre de ces familles dépend du hardware et du système d'exploitation. Les problèmes de compatibilité entre ArmHL et ArmEL sont assez difficiles à diagnostiquer, souvent même l'OS se révèle incapable de distinguer un exécutable HF d'un exécutable EL.
Tous les binaires Yoctopuce pour ARM sont fournis pré-compilée pour ArmHF et ArmEL, si vous ne savez à quelle famille votre machine ARM apartient, essayez simplement de lancer un exécutable de chaque famille.
21.3. Module alimenté mais invisible pour l'OS
Si votre Yocto-Color est branché par USB et que sa LED bleue s'allume, mais que le module n'est pas vu par le système d'exploitation, vérifiez que vous utilisez bien un vrai câble USB avec les fils pour les données, et non pas un câble de charge. Les câbles de charge n'ont que les fils d'alimentation.21.4. Another process named xxx is already using yAPI
Si lors de l'initialisation de l'API Yoctopuce, vous obtenez le message d'erreur "Another process named xxx is already using yAPI", cela signifie qu'une autre application est déjà en train d'utiliser les modules Yoctopuce USB. Sur une même machine, un seul processus à la fois peut accéder aux modules Yoctopuce par USB. Cette limitation peut facilement être contournée en utilisant un VirtualHub et le mode réseau 48.21.5. Déconnexions, comportement erratique
Si votre Yocto-Color se comporte de manière erratique et/ou se déconnecte du bus USB sans raison apparente, vérifiez qu'il est alimenté correctement. Evitez les câbles d'une longueur supérieure à 2 mètres. Au besoin, intercalez un hub USB alimenté 49 50.21.6. Par où commencer ?
Si c'est la première fois que vous utilisez un module Yoctopuce et ne savez pas trop par où commencer, allez donc jeter un coup d'œil sur le blog de Yoctopuce. Il y a une section dédiée aux débutants 51.22. Caractéristiques
Vous trouverez résumées ci dessous les principales caractéristiques techniques
de votre module Yocto-Color
| Largeur | 20 mm |
| Longueur | 60 mm |
| Poids | 4 g |
| Connecteur USB | micro-B |
| Canaux | 2 |
| Sytème d'exploitation supportés | Windows, Linux (Intel + ARM), Mac OS X, Android |
| Drivers | Fonctionne sans driver |
| API / SDK / Librairie (USB+TCP) | C++, Objective-C, C#, VB .NET, Delphi, Python, Java/Android |
| API / SDK / Librairie (seul.TCP) | Javascript, Node.js, PHP, Java |
| RoHS | oui |
| USB Vendor ID | 0x24E0 |
| USB Device ID | 0x0014 |
| Cables et boîtiers | disponibles séparément |
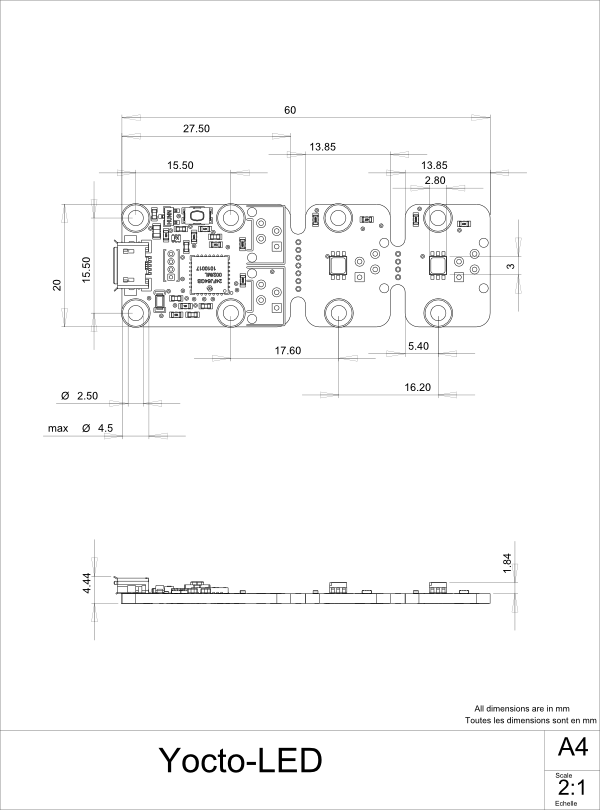
23. Index
AaddHslMoveToBlinkSeq addRgbMoveToBlinkSeq advertisedValue API B
beacon blinkSeqMaxSize blinkSeqSignature blinkSeqSize C
checkFirmware CheckLogicalName clearCache ColorLed command D
describe DisableExceptions download E
EnableExceptions EnableUSBHost F
FindColorLed FindColorLedInContext FindModule FindModuleInContext firmwareRelease FirstColorLed FirstColorLedInContext FirstModule FreeAPI functionBaseType functionCount functionId functionName functionType functionValue G
get_advertisedValue get_allSettings get_beacon get_blinkSeqMaxSize get_blinkSeqSignature get_blinkSeqSize get_errorMessage get_errorType get_firmwareRelease get_friendlyName get_functionDescriptor get_functionId get_functionIds get_hardwareId get_hslColor get_icon2d get_lastLogs get_logicalName get_luminosity get_module get_module_async get_parentHub get_persistentSettings get_productId get_productName get_productRelease get_rebootCountdown get_rgbColor get_rgbColorAtPowerOn get_serialNumber get_subDevices get_upTime get_url get_usbCurrent get_userData get_userVar GetAPIVersion GetTickCount H
HandleEvents hasFunction hslColor hslMove I
InitAPI isOnline isOnline_async L
load load_async loadAttribute log logicalName luminosity M
Module muteValueCallbacks N
nextColorLed nextModule P
persistentSettings PreregisterHub productId productName productRelease R
reboot rebootCountdown RegisterDeviceArrivalCallback RegisterDeviceRemovalCallback RegisterHub RegisterHubDiscoveryCallback registerLogCallback RegisterLogFunction registerValueCallback resetBlinkSeq revertFromFlash rgbColor rgbColorAtPowerOn rgbMove S
saveToFlash SelectArchitecture serialNumber set_allSettings set_allSettingsAndFiles set_beacon set_hslColor set_logicalName set_luminosity set_rgbColor set_rgbColorAtPowerOn set_userData set_userVar SetDelegate SetTimeout SetUSBPacketAckMs Sleep startBlinkSeq stopBlinkSeq T
techspec TestHub triggerFirmwareUpdate TriggerHubDiscovery U
unmuteValueCallbacks UnregisterHub UpdateDeviceList UpdateDeviceList_async updateFirmware updateFirmwareEx upTime usbCurrent usbcurrent userVar W
wait_async wiring Y
YColorLed YModule
- support@yoctopuce.com ←
- Le driver HID est celui qui gère les périphériques tels que la souris, le clavier, etc. ←
- Le connecteur Mini A a existé quelque temps, mais a été retiré du standard USB http://www.usb.org/developers/Deprecation_Announcement_052507.pdf ←
- Embases Molex ref 90325-3004 ou 90325-0004, disponibles chez la plupart des fournisseurs de composants électroniques (www.mouser.com, www.digikey.com, www.farnell.com, www.distrelec.ch...). S'utilise avec les connecteurs ref 90327-3304 ou 90327-0304 ←
- court-court-court long-long-long court-court-court ←
- su
pport @yoct opuce .com ← - www.yoctopuce.com/FR/virtualhub.php ←
- L'interface est testée avec Chrome, FireFox, Safari, Edge et IE 11. ←
- www.yoctopuce.com/FR/virtualhub.php ←
- Consultez la documentation du virtual hub pour plus de détails ←
- Embases Molex ref 90325-3004 ou 90325-0004, disponibles chez la plupart des fournisseurs de composants électroniques (www.mouser.com, www.digikey.com, www.farnell.com, www.distrelec.ch...). S'utilise avec les connecteurs ref 90327-3304 ou 90327-0304. ←
- L'hexadécimal consiste à compter en base 16 au lieu de base 10: on utilise les signes 0..9, A..F. On utilise parfois le préfixe 0x pour signaler l'utilisation de l'hexadécimal: ainsi 10 en base 10 s'écrit 0xA en hexadécimal, 15 d'écrit 0xF, 16 s'écrit 0x10, 17 s'écrit 0x11 et ainsi de suite ←
- http://www.yoctopuce.com/FR/libraries.php ←
- Si vous souhaitez recompiler l'API en ligne de commande, vous aurez aussi besoin de l'API C++ ←
- http://www.yoctopuce.com/FR/libraries.php ←
- http://www.yoctopuce.com/FR/virtualhub.php ←
- www.yoctopuce.com/FR/libraries.php ←
- www.yoctopuce.com/FR/virtualhub.php ←
- http://babeljs.io ←
- Quelques serveurs PHP gratuits: easyPHP pour windows, MAMP pour Mac Os X ←
- www.yoctopuce.com/FR/libraries.php ←
- www.yoctopuce.com/FR/virtualhub.php ←
- Si vous n'avez pas d'éditeur de texte, utilisez Notepad plutôt que Microsoft Word. ←
- http://www.microsoft.com/visualstudio/en-us/products/2010-editions/visual-cpp-express ←
- www.yoctopuce.com/FR/libraries.php ←
- www.yoctopuce.com/FR/libraries.php ←
- www.yoctopuce.com/FR/article/nouvelle-librairie-objective-c-pour-mac-os-x ←
- http://www.microsoft.com/visualstudio/en-us/products/2010-editions/visual-basic-express ←
- www.yoctopuce.com/FR/libraries.php ←
- Les sources de cette DLL sont disponibles dans l'API C++ ←
- Pensez à changer le filtre de la fenêtre de sélection de fichiers, sinon la DLL n'apparaîtra pas ←
- http://www.microsoft.com/visualstudio/en-us/products/2010-editions/visual-csharp-express ←
- www.yoctopuce.com/FR/libraries.php ←
- Les sources de cette DLL sont disponibles dans l'API C++ ←
- Pensez à changer le filtre de la fenêtre de sélection de fichiers, sinon la DLL n'apparaîtra pas ←
- En fait, Borland a diffusé des versions gratuites (pour usage personnel) de Delphi 2006 et Delphi 2007, en cherchant un peu sur internet il est encore possible de les télécharger. ←
- Les librairies Delphi sont régulièrement testées avec Delphi 5 et Delphi XE2 ←
- www.yoctopuce.com/FR/libraries.php ←
- Utilisez le menu
outils / options d'environement ← - http://www.python.org/download/ ←
- www.yoctopuce.com/FR/libraries.php ←
- www.yoctopuce.com/FR/libraries.php ←
- www.yoctopuce.com/FR/virtualhub.php ←
- www.yoctopuce.com/FR/libraries.php ←
- Les YoctoHub sont un moyen simple et efficace d'ajouter une connectivité réseau à vos modules Yoctopuce. http://www.yoctopuce.com/FR/products/category/extensions-et-reseau ←
- Les librairies JavaScript, Node.js et PHP ne permettent pas encore de mettre à jour les modules, mais ces fonctions seront disponibles dans un prochain build. ←
- http://www.yoctopuce.com/EN/virtualhub.php ←
- voir: http://www.yoctopuce.com/FR/article/message-d-erreur-another-process-is-already-using-yapi ←
- voir: http://www.yoctopuce.com/FR/article/cables-usb-la-taille-compte ←
- voir: http://www.yoctopuce.com/FR/article/combien-de-capteurs-usb-peut-on-connecter ←
- voir: http://www.yoctopuce.com/FR/blog_by_categories/pour-les-debutants ←
