![]() Nous sommes toujours à l'affût de nouveaux capteurs abordables qui pourraient être utiles à nos clients. Parmi les applications assez difficiles figure la détection à distance d'objets en mouvement. Nous avons donc été intéressé de découvrir le petit capteur radar de RFbeam nommé K-LD2.
Nous sommes toujours à l'affût de nouveaux capteurs abordables qui pourraient être utiles à nos clients. Parmi les applications assez difficiles figure la détection à distance d'objets en mouvement. Nous avons donc été intéressé de découvrir le petit capteur radar de RFbeam nommé K-LD2.
Ce petit module se présente sous la forme d'un carré de 25mm par 25mm, avec environ 7mm d'épaisseur.
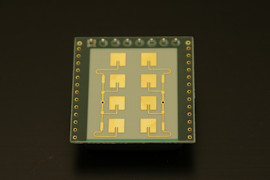

Le capteur radar RFbeam K-LD2
La grande face intègre directement les antennes haute-fréquence pour l'émission et la réception du signal radar, et derrière le PCB se trouve toute l'électronique nécessaire pour effectuer les mesures et les calculs, de sorte à fournir directement une information de détection d'objet en mouvement, dont la vitesse de déplacement.
A la lecture de la documentation, on reconnaît tout de suite un produit sérieux: la documentation est claire, bien illustrée. Le principe de fonctionnement est expliqué dans les détails et les paramètres de contrôle sont bien définis. On voit que les concepteurs du produit ont pensé à ceux qui allaient l'utiliser. Sans comparaison avec le bric-à-brac que l'on pourrait trouver sur Alibaba...
Il existe un petit kit d'évaluation pas très cher avec un logiciel qui permet de jouer avec les paramètres pour voir leur effet sur les niveaux de détection. Si vous voulez utiliser ce capteur, ça peut vous gagner du temps, et le logiciel de démonstration est très bien fait.

Interface du logiciel d'évaluation fourni dans le kit d'évaluation
Raccordement
Ce capteur peut être alimenté en 3.3V ou 5V, et communique avec une interface série TTL en 38'400bps. Le Yocto-Serial est donc notre module idéal pour communiquer avec lui et l'alimenter. Voici le schéma de connexion:

Raccordement du radar RFbeam K-LD2 au Yocto-Serial
Protocole
Ce capteur peut être configuré et interrogé par un protocole très simple, basé sur des commandes textuelles. Nous allons donc directement intégrer l'interrogation du radar dans un "job" à l'intérieur du Yocto-Serial, de sorte à ce que l'interrogation soit faite de manière autonome par le module Yoctopuce et que nous puissions utiliser le radar directement comme un capteur natif Yoctopuce.
La commande la plus commode pour notre application est la "C01": elle retourne quatre nombres suivis par des points-virgules, correspondant à
- la vitesse du principal objet qui avance
- la vitesse du principal objet qui recule
- l'amplitude de l'écho retourné par l'objet qui avance
- l'amplitude de l'écho retourné par l'objet qui recule
Si aucun objet qui avance ou recule n'atteint le seuil d'amplitude minimale de détection configuré dans le radar, le chiffre correspondant reste à zéro.
Voici donc le protocole que vous pouvez utiliser dans la définition d'un job du Yocto-Serial:

Job pour interroger le capteur radar K-LD2
Pour obtenir la vitesse effective en m/s ou en km/h depuis le chiffre retourné, il faut le multiplier par un facteur qui dépend de l'angle d'orientation du radar par rapport au sens du déplacement. C'est logique, et tout est expliqué très clairement dans la documentation.
Essais
Une fois ce job lancé, les fonctions genericSensor1..4 du Yocto-Serial annoncent immédiatement les objets détectés par le radar. On peut donc monter notre capteur radar sur un YoctoHub-Ethernet, le mettre au bout d'un câble au bord du chemin, alimenté en Power-over-Ethernet, et utiliser Yocto-Visualization pour afficher les mesures en temps réel et voir ce qu'il se passe...

Trace des mesures retournées par le capteur K-LD2
On reconnaît sans difficulté une piéton qui passe dans un sens, et une voiture qui passe ensuite dans l'autre sens.
Conclusion
Pour petit produit à 40 EUR, ce radar nous a impressionné par sa qualité et la facilité à le mettre en œuvre. Il pourra vous être très utile par exemple pour détecter de manière fiable à distance un utilisateur qui s'approche, en extérieur aussi bien qu'en intérieur.
Vu la qualité de ce produit, on a pas résisté à commander son grand-frère, le K-LD7, qui est en plus capable de mesurer la position exacte de l'objet en mouvement, en plus de sa vitesse. On vous redira probablement à l'occasion s'il marche aussi bien...

